

电子皮肤是模仿人类皮肤特性、感知能力和附加功能的仿生设计,本质上是一种仿生柔性触觉传感器,具有延展性、弹性、柔软可拉伸性,融合了柔性电子、微纳传感、生物材料和智能算法等新兴技术,具备感知、响应、传输外部刺激等能力。
图:电子皮肤 源自:生物探索
电子皮肤在人形机器人触觉感知方面有不可替代的作用,能够感受到最小至1g的物体所产生的压力,每平方米具备至少400个传感器,拉伸强度高达50%,拥有比指纹解锁还高的识别精度,并可以分布在机器人全身及局部关节、手臂、肩肘等部位。
例如:将它贴在贴在医疗型机器人手上,就能像医生手指一样摸出肿瘤,甚至比传统仪器提前3 天发现病变;贴在工业型机器人身上,能做到毫秒级响应,能抓鸡蛋不碎、拧螺丝不滑等操作。
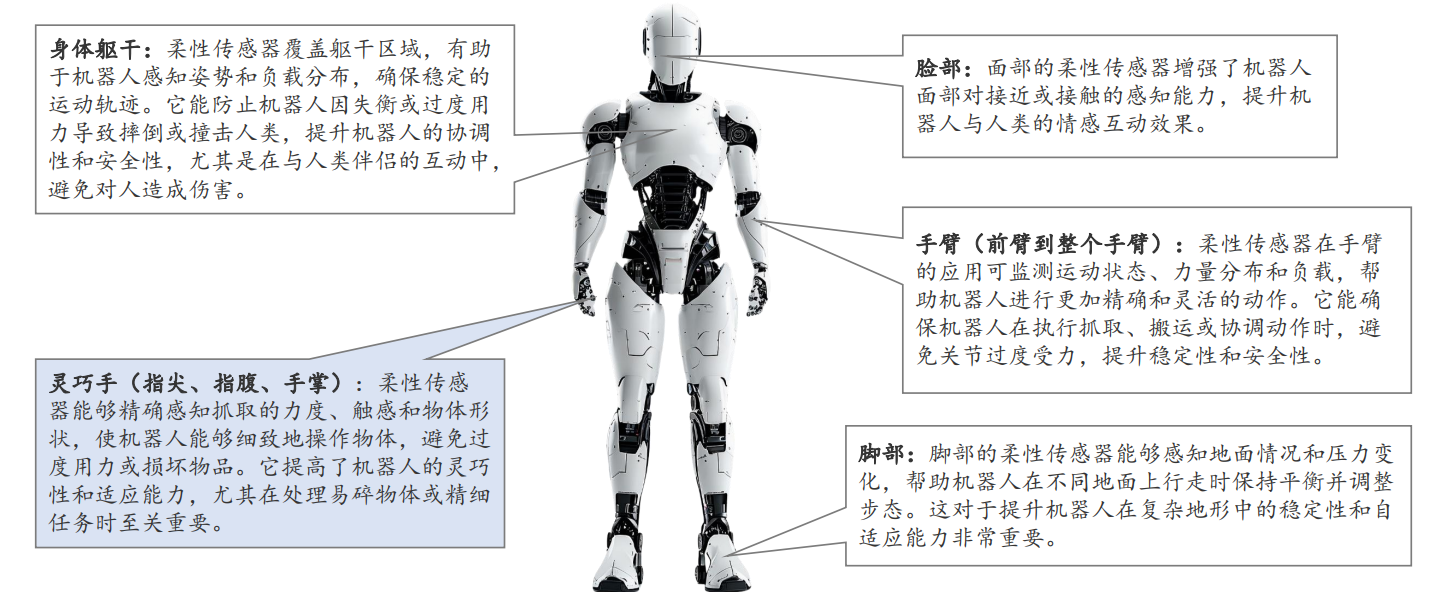
图:电子皮肤在人形机器人的应用场景 源自:华龙证券
电子皮肤比蝉翼还轻,却能精准复刻人类皮肤的三层结构:
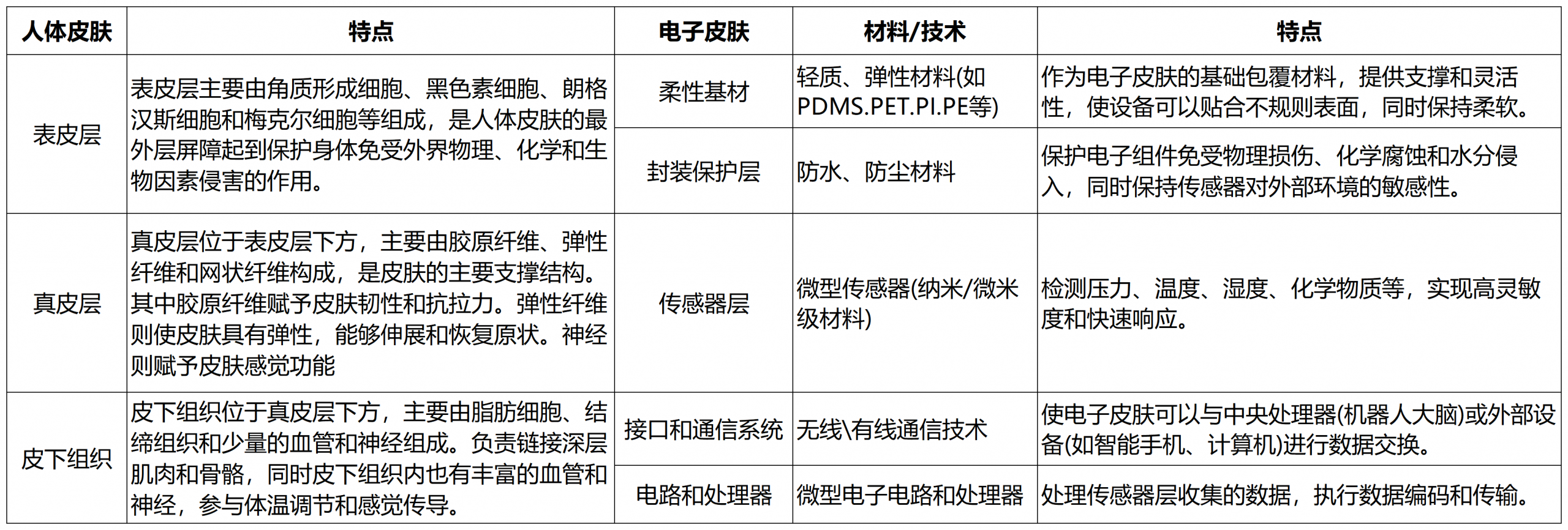
图:电子皮肤与人体皮肤的对照及相应技术特点 源自:华鑫证券研究
电子皮肤由多层堆叠的形式构成,其表层由柔性基底材料构成,例如PDMS、PET、PI、PE等弹性材料,模拟人类皮肤的触感和质感;同时搭载传感器层,以各种类型的传感器形成阵列,例如柔性触觉传感器、力觉传感器、变形传感器等,感知对外界环境变化及刺激;再通过电路、处理器进行信号的处理和传输,将外界信号传至中央处理器或外部设备进行数据交换。
本文我们简单剖析了电子皮肤的三层结构,如有错漏,欢迎加入艾邦人形机器人产业链交流群补充:

一、柔性基体层:主要为具有弹性的聚合物材料
传统电子材料如硅、金属和氧化物等因为脆性大而在电子皮肤实际应用中受到限制,因此常需使用柔性材料或弹性材料作为构建电子皮肤的基体,如弹性薄膜基体、水凝胶基体、3D 海绵基体等。
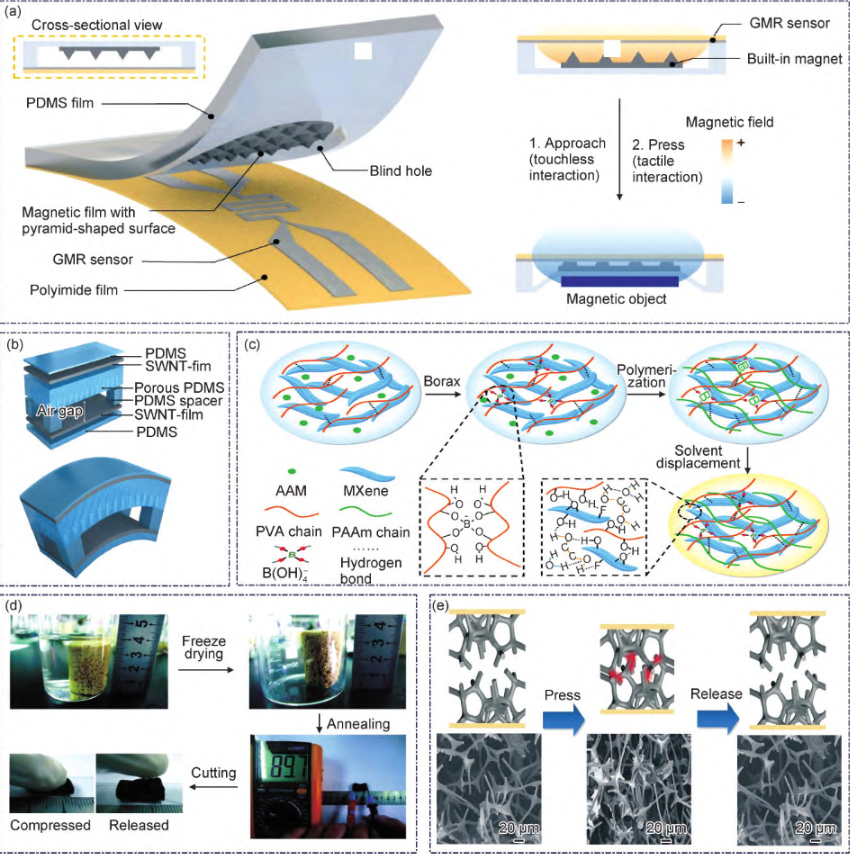
图:不同基体的电子皮肤
(a),(b)PDMS基体电子皮肤;(c)水凝胶基电子皮肤;(d),(e)3D)海绵基体电子皮肤
源自:北京理工大学材料学院 《面向电子皮肤的智能材料构建策略》
(1)弹性薄膜基体
弹性薄膜基体柔韧性优异、制备方式简单,是制备电子皮肤最为常见的基体之一。聚二甲基硅氧烷(polydimethylsiloxane,PDMS)、聚酰胺(PA)和聚对苯二甲酸乙二醇酯(PET)常作为基材制成薄膜并用于电子皮肤。
在众多柔性基底中,PDMS是一种性能优异的硅氧烷弹性体,在柔性电子器件中受到了研究学者们的青睐。与传统材料相比,PDMS有如下优点:价格低廉,适合大面积制作;制备过程简单且容易封装;具有良好的生物兼容性和透气性;具有良好的热学稳定性。此外,PDMS具有很好的柔性,可以与粗糙的表面很好地接触。
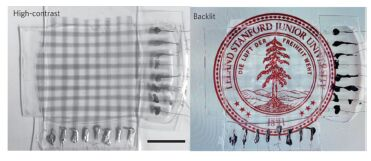
图:基于PDMS和碳纳米管的压力/应变测量的电子皮肤阵列触觉传感器 源自:哈尔滨工业大学学报 《电子皮肤触觉传感器研究进展与发展趋势》
(2)水凝胶基体
水凝胶由交联的亲水性聚合物网络和大量水组成,其具备与人体皮肤组织相似的弹性模量,以及优异的生物相容性,是制备电子皮肤传感器的理想材料。然而,常见水凝胶基体,如聚乙烯醇(polyvinyl al⁃cohol,PVA)、聚丙烯酰胺(polyacrylamide,PAM)、聚丙烯酸等,并不具备导电能力。将其应用于电子皮肤,需要提升导电性。将导电填料复合到水凝胶基质中可有效提高其导电性。
此外,导电聚合物前驱体(聚苯胺(polyaniline,PANI)、聚吡咯(polypyrrole,PPy)和聚(3,4-乙烯二氧噻吩)(poly(3,4-ethylenedioxythiophene,PEDOT)等)在水凝胶网络中的原位聚合可生成均相互穿网络本征导电水凝胶。
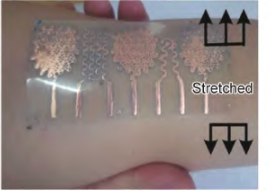
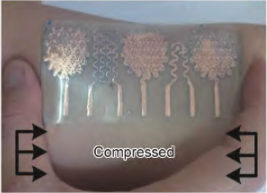
图:结构水凝胶作柔性电子皮肤的应用示意图 源自:北京理工大学材料学院 《面向电子皮肤的智能材料构建策略》
(3)3D 海绵基体
3D 柔性海绵是由相互连接的金属颗粒或细丝组成的三维结构,常用的材料包括碳纳米管森林、气凝胶、聚合物泡沫和碳纳米管-碳颗粒杂化物等。其能通过增大材料的表面粗糙度和接触面积,来提升材料的传感性能,在电子皮肤柔性传感方面具备巨大潜力。

图:波浪3D海绵 源自: 南良國際股份有限公司官网
二、 传感器层:电子皮肤的核心功能层
传感器作为电子皮肤的核心组成部分,可以准确、及时地监测外界环境的刺激变化,如应变、压力、温度,并将其转化为可以被测量或记录的数字信号或图形信号,从而用于机器人运动监测、医疗检测等领域。
(1)传感器层的作用
a)压力感应:电子皮肤中的压力传感器是其核心部分之一。这些传感器通常由压电材料或电容式元件构成,能够在受到外部压力时产生电信号。当物体接触或施加压力到电子皮肤上时,传感器层的物理形态发生变化,导致电荷重新分布,进而产生电压或电流变化。这些变化被转换为数字信号,以量化接触的强度和位置。
b)温度和湿度检测:电子皮肤还集成了温度和湿度传感器。这些传感器能够检测环境中的微小温度和湿度变化,并将其转换为电信号。例如,温度传感器可能基于热电效应,而湿度传感器则可能基于材料的电阻或电容随湿度变化而变化的原理。
(2)柔性传感器
a)柔性传感器是电子皮肤中的核心组件,是赋予电子皮肤以及人形机器人感知环境刺激的重要因素。目前柔性传感器和机器人电子皮肤无严格意义上的区分,电子皮肤领域的成熟研究主要集中在柔性传感器上,是电子皮肤最重要的一环。
电子皮肤的柔性传感器主要有:压力传感器、应变传感器、温度传感器、湿度传感器等,多种传感器形成传感器阵列,再通过电路等与其他元件实现互联和信号传输。
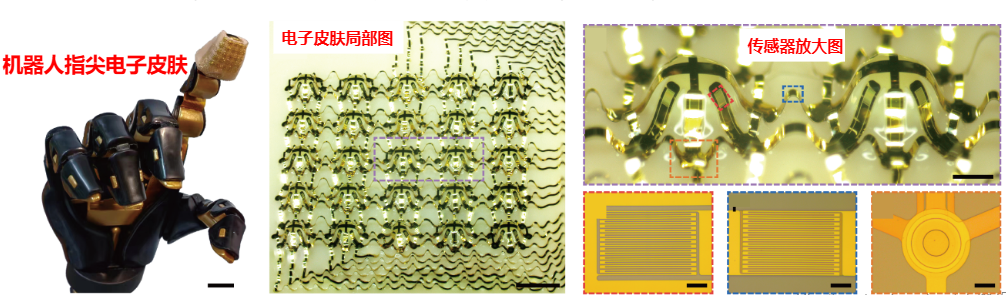
图:电子皮肤传感器结构示意图
b)柔性传感器市场发展情况
● 柔性传感器(电子皮肤)占人形机器人整体价值量的10%左右,具有较高的市场价值。目前一只机器人手的价格可控制在两千元左右。
● 根据有关机构预测,电子皮肤在2024年全球市场总值约为63亿美元,Precedenceresearch预测电子皮肤市场将会在未来十年保持17%以上的年复合增长率,到2034年超过300亿美元。
● 预计到2030年,人形机器人电子皮肤市场规模将达到90.5亿元,年复合增长率为64.3%。
● 目前电子皮肤在机器人领域的应用研究还处于起步阶段,电子皮肤的研究重点在小面积的智能穿戴、人体检测等领域;机器人当中的应用发展主要集中在局部小区域,例如关节、灵巧手、手指指尖等,大面积的应用以及与机器人中央处理器的连接通讯研究有待进一步发展。
三、 导电介质层:以纳米导电材料和合聚合物导电材料为主
大多数柔性基体本身不具备导电性,将导电介质与柔性体复合是制备电子皮
肤的最为常见的方式。目前,主要的导电介质有复合纳米导电填料、导电聚合物、离子液体等。
(1)纳米导电填料
导电填料能在交织重叠的网络中形成导电通路,在使材料具备出色的拉伸和保型能力同时提高其导电性。常见导电填料有碳基导电填料(MXene、氧化石墨烯、碳纳米管)、金属纳米颗粒/纳米线(Au NFs/Ag NFs)、液态金属颗粒(共晶镓铟,EGaIn)等。
然而在引入导电填料时,往往会存在纳米导电填料分散性差、易聚集等问题。在聚合物基体与导电填料混合的过程中,大多数的导电填料会被聚合物基体分隔开来,因此导电填料并不能相互接触,形成高于自由电子能量的势垒,这就是纳米复合材料导电的“隧穿效应”理论。
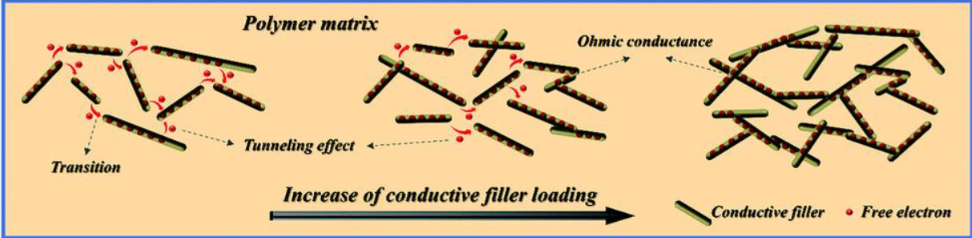
图:导电纳米复合材料的导电机制示意图 源自:四川大学 《橡胶纳米复合材料多尺度结构调控及仿生电子皮肤研究》
(2)导电聚合物
聚[3,4-(乙二氧基)噻吩](PEDOT)、聚吡咯(PPy)和聚苯胺(PANI)等聚合物分子本身具有共轭链,具备极高的电活性。上述导电聚合物材料由于其兼具导电和柔性的优势,因此被广泛应用于电子皮肤及柔性传感器领域。然而大多数导电聚合物的电导率相对较低,单一的导电聚合物材料难以满足电子皮肤的应用需求。为解决这一问题,通过合理的结构设计和分子工程可以提升材料的电导率以满足电子皮肤的传感需求。
(3)离子导电介质
不同于电子导电,人体皮肤依靠移动离子的导电性来感知、传输和处理信息。基于水凝胶三维聚合物网络具有亲水特性和高吸水能力,将导电离子液体渗透到水凝胶中,可在水凝胶柔性基体上实现离子导电。相比于电子传输,离子导电原理更类似于生物体信号传递机制。
注:以上信息均整理自网络信息、中国知网及相关企业官网,如有错漏欢迎加群补充

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐:
电子皮肤产业应用发展论坛(11月27日 苏州)
一、会议议题
序号
演讲议题
演讲企业
1
通过微纳结构设计提高柔性传感器灵敏度研究
拟邀:苏州大学
2
触觉感知在人机交互上解决方案
拟邀:模量科技
3
机器人灵巧手仿生触觉阵列优化设计
拟邀:帕西尼、灵巧智能
4
界面离电子触觉传感技术介绍及其应用
拟邀:他山科技
5
卷对卷印刷技术在柔性传感器量产中的应用
拟邀:湖州途柔科技
6
柔性传感器在人机互动领域的前沿化发展及应用挑战
拟邀:电子科大
7
织物电子皮肤创新性应用与发展
拟邀:浙江大学
8
印刷柔性电子技术赋能电子皮肤产业化发展
拟邀:昇印光电
9
薄膜压力传感器在具身机器人中的应用
拟邀:福莱新材
10
柔性基底材料延展性与导电性的功能平衡研究及新型材料开发
邀请中
11
柔性导体/介电材料在电子皮肤中的产业化进展
邀请中
12
多模态融合压力-温度-湿度集成传感器开发
邀请中
13
柔性传感器基底材料自修复/自愈性研究进展
邀请中
14
低功耗/自供电电子皮肤方案
邀请中
15
植入式电子皮肤在医疗监测中的发展及应用挑战
邀请中
16
工业检测及其他应用领域的传感器发展现状
邀请中
17
电子皮肤如何赋予汽车智能座舱手势识别与触觉控制新范式
邀请中
18
可穿戴电子皮肤在医疗健康监测设备灵敏度优化方案
邀请中
19
电子皮肤材料量产化与制造成本压缩路径
邀请中
20
柔性传感器产品可靠性验证标准体系建立
邀请中
议题征集中,创新演讲及赞助请联系 艾果果:13312917301(同微信)
二、报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com

扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名:
https://www.aibang360.com/m/100268?ref=172672
点击阅读原文,即可报名!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
二、报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com
扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名
或者复制网址到浏览器后,微信注册报名:
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
