
8月17日首个人形机器人运动会在北京圆满闭幕,更是将这一领域的热点话题推向了高潮,标志着人形机器人正成为新时代新科技的风向标。
人形机器人行业兴起,对于高效、精确与多维度的在抓取过程中收集各类触觉信息数据的需求也越发强烈。本文将从人体皮肤的机理出发,给大家梳理一下柔性电子皮肤与触觉传感器在当下的各类技术方案、发展趋势与部分企业分布。因为是一个全新的前沿行业的关系,如果有信息纰漏之处,欢迎加入艾邦人形机器人产业链交流群批评指正。

一、人类皮肤的触觉与触觉传感器
在谈柔性电子皮肤与触觉传感器技术之前,我们先来了解人类皮肤的触觉能力与相应机理,也能与后文的各类触觉传感器有上一个性能的比对。
首先从神经学的角度来看,人的触觉主要是通过分布在皮肤不同深度的默克尔细胞、迈斯纳小体、环层小体、鲁菲尼小体4种触觉感受器实现的。
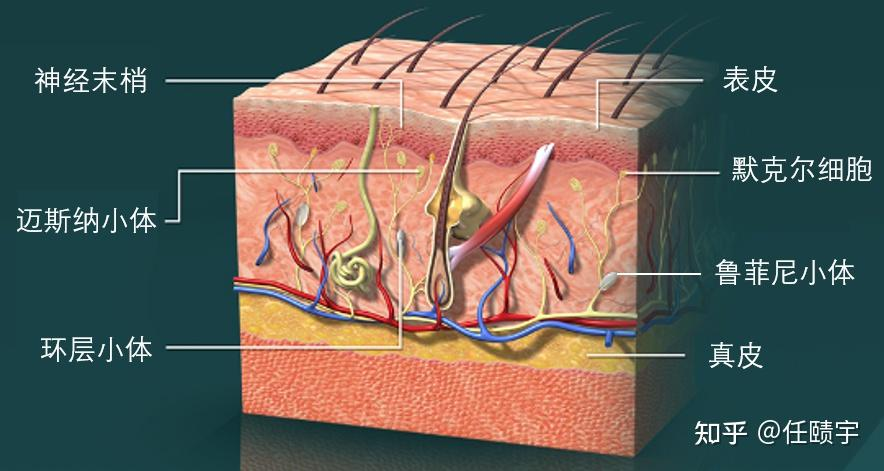
图:人体皮肤机理层 源自:知乎
人体皮肤还有个非常出色的性能就是其拉伸率,根据生物学的一篇研究,人体最富弹性的皮肤位于手腕部位,此处皮肤能够在手腕弯曲时承受20.4%的拉伸率,且是三维全向的柔性。如下图所示,可以看到绝大多数机器人的手腕或脚踝都采用的是完全刚性包裹或者是直接外露:

图:人类手腕与人形机器人手腕包裹的示意图 源自:知乎
二、 电子皮肤
首先明确一下柔性电子皮肤与触觉传感器的概念大小关系,我们一般谈的柔性电子皮肤是一个更大且更未来的概念,即兼备柔性+触觉反馈+仿生的特性,而现阶段大多数在末端夹爪与灵巧手上使用的均为触觉传感器,即仅仅具备触觉反馈的功能特性,并不具备物理柔性与仿生特性,因此柔性电子皮肤一定是一款触觉传感器,而绝大多数触觉传感器都不能称作为柔性电子皮肤。
(1)电子皮肤的组成与结构
电子皮肤由多层堆叠的形式构成,其表层由柔性基底材料构成,例如PDMS、PET、PI、PE等弹性材料,模拟人类皮肤的触感和质感;同时搭载传感器层,以各种类型的传感器形成阵列,例如柔性触觉传感器、力觉传感器、变形传感器等,感知对外界环境变化及刺激;再通过电路、处理器进行信号的处理和传输,将外界信号传至中央处理器或外部设备进行数据交换。
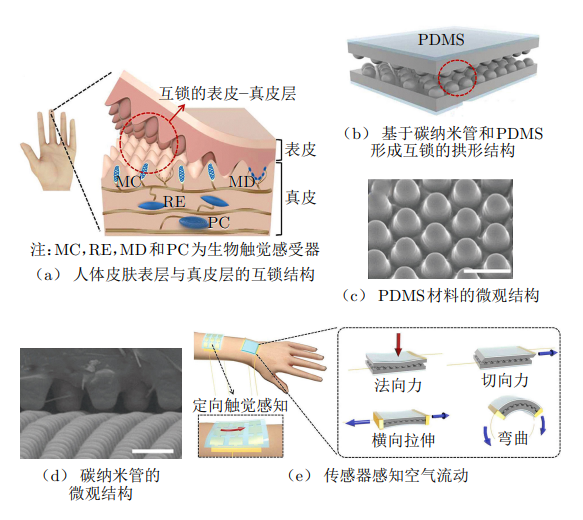
图:阵列电子皮肤 源自:上海大学《触觉传感器与电子皮肤研究进展》
(2)电子皮肤作用机理
根据斯坦福大学研究电子皮肤领域的鲍哲南教授认为,电子皮肤需要拥有一下三个方面的特性:
1)感知外界刺激,识别触觉信号;
2)模拟人体皮肤的柔软性,可以拉伸;
3)将感知信息传递给中央处理系统(大脑、机器人中央处理器),实现人机通信和反馈。

图:电子皮肤作用机理 源自:Nature
利用微结构电阻式压力传感器、柔性印刷有机电子电路、含有光激活离子通道的神经细胞互相连接,实现触觉信号与中央处理系统的连接。其中微结构电阻式压力传感器有碳纳米管和弹性体复合材料构成,形成一种微小金字塔结构,涂覆于人造皮肤的表面。
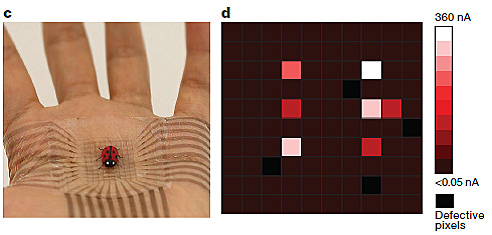
图:粘贴于手掌的晶体管阵列精确测量人工瓢虫的位置 源自:Nature
(3)电子皮肤技术发展历程及发展趋势
20世纪70年代,国际开启对电子皮肤触觉传感器的研究;80年代,触觉研究增长迅速,压阻式、电容式、光电式等原理均得到应用,但是精度低且对微小作用力无法检测;90年代,电子皮肤往多方向发展;21世纪以来,电子皮肤触觉传感器柔性化、弹性化、透明化、可扩展性、轻量化、多功能化得到显著发展。
方向发展:
1)自愈合、自修复能力:采用自愈合聚合物、纳米复合材料,赋予电子皮肤自愈合能力,在遭受物理损伤时能够像人类皮肤一样自行恢复,增加它的耐用性和寿命;
2)高度集成和多功能化:将传感器、处理系统、通信系统、能源供应系统一体化,具备更强的感知能力。
3)无源驱动和自供电系统:提升柔性触觉系统的独立性与适应性,整合能量采集机制,摆脱传统电池的依赖,转向压电(PEG)、摩擦电(TENG)、热电、光电、生物电化学等绿色能源方案;
4)生物相容性和可降解性:在生物医疗领域,手术机器人直接接触人类皮肤及器官,为了防止产生排斥反应,引入天然高分子(如明胶、丝素蛋白、聚乳酸)或新型绿色导电材料,可自然降解且无毒副作用

图:赛感科技电子皮肤 源自:赛感科技
三、 触觉传感器
机器人的触觉传感系统通过接触来测量物体的物理特征,从而实现对周围环境的感知。机器人触觉感知有许多应用场景:机器人在抓取物体时,可通过触觉感知来控制抓取的力度大小,不会因为抓力过小使物体滑落,也不会因为抓力过大导致物体损坏;机器人还能根据触觉信息,通过深度学习等识别算法来识别接触物体的材质及种类等。
图:华威科灵巧手抓嫩豆腐 源自:华威科
1、触觉vs触觉传感器
● 触觉是人类皮肤的一项关键功能,通过物理接触实现与周围环境的互动。触觉感受器通常基于触摸/压力检测,实现对外部刺激的反应,如压力、弯曲、拉伸和温度变化,从而识别接触的物体。
● 触觉传感器是用于人形机器人中模仿触觉功能的传感器。其基本原理是通过向一个触觉阵列施加压力,产生电流,并通过更高层的算法实现软硬件的协同反应,从而实现触觉操作的反馈,以及输入和输出。
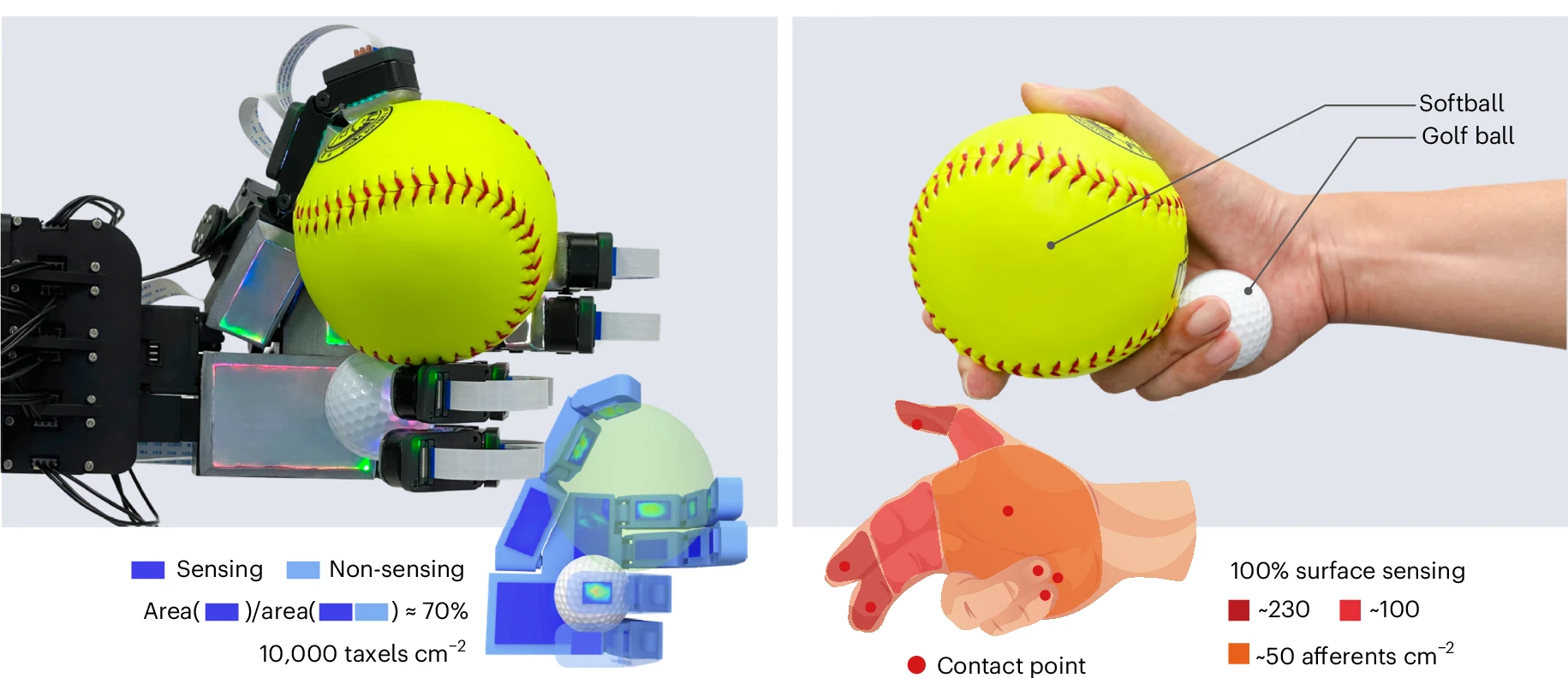
图:机器人触觉传感器与人手触觉点示意图 源自:《自然·机器智能》
2、 触觉传感器的类型及工作原理
(1)压阻式触觉传感器
压阻式传感器利用材料的电阻率随外部压力变化而改变的特性。当压力施加于传感器时,材料内部的微观结构发生形变,导致电阻值发生变化。这种传感机制基于半导体传导的压阻效应(piezoresistiveeffect),当材料受力变形时,其能带结构或载流子散射特性发生变化,从而改变导电性。
凭借其结构简单性与较高的灵敏度,压阻式传感器成为当前主流的传感方案。如汉威科技开发的柔性触觉传感器通过纳米纤维/CNTs 复合结构设计,实现了 0.3mm 超薄厚度与 1ms超快响应时间,已应用于机器人灵巧手、智能座舱座椅等场景。
另外,福莱新材、墨现科技、埔慧科技等企业均采用该技术路线。

图:压阻式传感器工作原理及应用示意图 源自:东吴证券
(2)电容式触觉传感器
电容式触觉传感器则利用两极板间电容的变化来检测受力信息。当外力作用于传感器时,两极板间的相对位置或介质厚度发生变化,导致电容值的变化,通过检测电容变化量来获取受力信息。电容式传感器在三维力检测中具有显著优势,能够同时测量X、Y、Z三个方向的力分量。
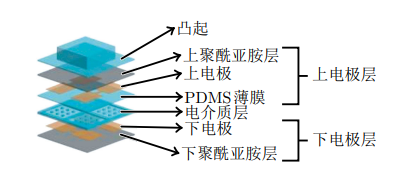
图:电容传感器结构图 源自:上海大学《触觉传感器与电子皮肤研究进展》
在针对柔性电子皮肤的应用上,电容式触觉传感器有以下优缺点:
优点:具备较好的柔性,对力感知灵敏度高(一般有效阈值能达1g),能够衍生为接近传感器的应用;
缺点:抗干扰能力差(EMC差),较难对切向力进行直接的定量精准测量;
代表企业如他山科技、哈普泰克、猿声科技、韧和科技等。
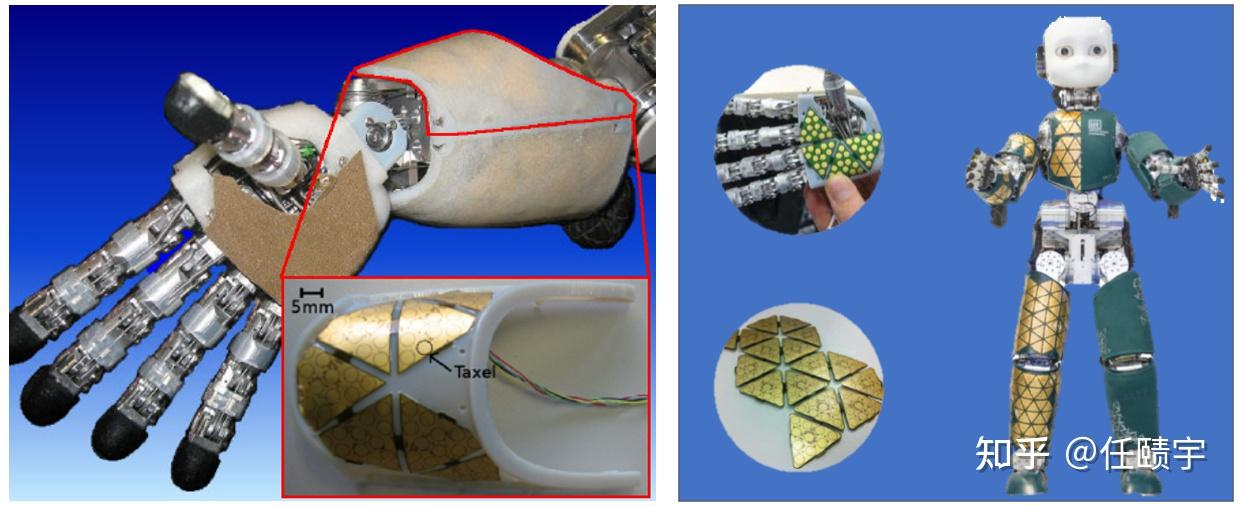
图:电容式触觉传感器在人形机器人胸部、大小腿、大小臂与手部中的应用示意图 源自:知乎
(3)压电式传感器
压电式触觉传感器是一种基于压电效应的传感器。压电效应指当晶体受到法向力时,内部产生电极化现象,撤掉外力时,晶体又恢复到不带电状态。将压电式触觉传感器连接到电荷放大器和测量电路上,采集其与所受外力相关的电信号,从而实现触觉检测。
压电式触觉传感器是一种自发电和机电转换传感器,不需要外部电源,因此这种传感器更便于携带,且其材料刚度高,线性度好,响应灵敏,但它易受噪声干扰,其介电性会受温度影响。
代表企业如三三科技、凸申科技等。
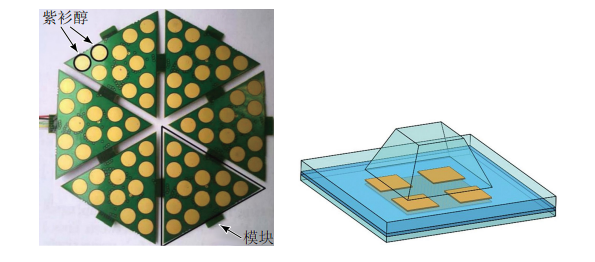
图:压电式触觉传感阵列 源自:上海大学《触觉传感器与电子皮肤研究进展》
(4)光学式触觉传感器
光学式触觉传感器将传感器所受压力映射为光信号强度、波长等性质的变化,通过检测光学信号来检测传感器所受压力。光学式触觉传感器所依赖的传感原理包括光强调制、光纤布拉格光栅(Fiber BraggGrating,FBG)技术和干涉测量检测,前两种传感原理已得到广泛应用。
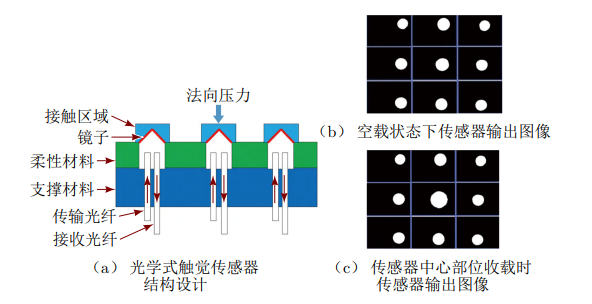
图:阵列式光学式触觉传感器 源自:上海大学《触觉传感器与电子皮肤研究进展》
(5)其他类型
除了上述类型外,还有磁电式触觉传感器,通过磁场变化转换为电信号来检测压力;流体式触觉传感器如BioTac则通过柔性橡胶皮和离子导电流体实现对法向力和剪切力的测量;摩擦式触觉传感器,利用传感器表面形变导致摩擦电效应的变化,测量电荷的变化得到压力强度,进一步转化处理成电信号。
四、 未来发展趋势
柔性传感器(电子皮肤)占人形机器人整体价值量的10%左右,具有较高的市场价值。目前一只机器人手的价格可控制在两千元左右。
根据有关机构预测,电子皮肤在2024年全球市场总值约为63亿美元,Precedenceresearch预测电子皮肤市场将会在未来十年保持17%以上的年复合增长率,到2034年超过300亿美元。
预计到2030年,人形机器人电子皮肤市场规模将达到90.5亿元,年复合增长率为64.3%。
目前电子皮肤在机器人领域的应用研究还处于起步阶段,电子皮肤的研究重点在小面积的智能穿戴、人体检测等领域;机器人当中的应用发展主要集中在局部小区域,例如关节、灵巧手、手指指尖等,大面积的应用以及与机器人中央处理器的连接通讯研究有待进一步发展。
五、 企业分布
国外企业
在全球触觉传感器市场中,欧美和日本等发达国家的企业占据主导地位。这些企业在技术研发、产品创新、市场开拓等方面具有较强的竞争优势。例如,SynTouch、Novasentis、Tekscan等公司在触觉传感器领域具有深厚的积累和丰富的产品线。
国内企业
近年来,中国电子皮肤与触觉传感器企业也取得了显著进步。虽然与国外企业相比仍存在一定差距,但国内企业在技术研发和市场开拓方面不断努力,逐渐崭露头角。电子皮肤企业包括途见科技、墨现科技、赛感科技、灵感科技等;人形机器人触觉传感器企业代表有帕西尼、他山科技、汉威、福莱新材等等。
随着技术的不断进步和市场的不断扩大,相信中国触觉传感器企业将在未来迎来更加广阔的发展空间。同时,国内外企业的合作与交流也将促进触觉传感器技术的进一步发展和创新。
注:本文整理自知乎、中国知网以及各企业官网,如有错漏,欢迎加群补充!

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。


活动推荐:
电子皮肤产业应用发展论坛(11月27日 苏州)
一、会议议题
序号
演讲议题
部分拟邀请
1
通过微纳结构设计提高柔性传感器灵敏度研究
苏州大学
2
触觉感知在人机交互上解决方案
模量科技
3
机器人灵巧手仿生触觉阵列优化设计
帕西尼、灵巧智能
4
界面离电子触觉传感技术介绍及其应用
他山科技
5
卷对卷印刷技术在柔性传感器量产中的应用
湖州途柔科技
6
柔性传感器在人机互动领域的前沿化发展及应用挑战
电子科大
7
织物电子皮肤创新性应用与发展
浙江大学
8
印刷柔性电子技术赋能电子皮肤产业化发展
昇印光电
9
薄膜压力传感器在具身机器人中的应用
福莱新材
10
柔性基底材料延展性与导电性的功能平衡研究及新型材料开发
邀请中
11
柔性导体/介电材料在电子皮肤中的产业化进展
邀请中
12
多模态融合压力-温度-湿度集成传感器开发
邀请中
13
柔性传感器基底材料自修复/自愈性研究进展
邀请中
14
低功耗/自供电电子皮肤方案
邀请中
15
植入式电子皮肤在医疗监测中的发展及应用挑战
邀请中
16
工业检测及其他应用领域的传感器发展现状
邀请中
17
电子皮肤如何赋予汽车智能座舱手势识别与触觉控制新范式
邀请中
18
可穿戴电子皮肤在医疗健康监测设备灵敏度优化方案
邀请中
19
电子皮肤材料量产化与制造成本压缩路径
邀请中
20
柔性传感器产品可靠性验证标准体系建立
邀请中
议题征集中,创新演讲及赞助请联系 艾果果:13312917301(同微信)
二、报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com

扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名:
https://www.aibang360.com/m/100268?ref=172672
点击阅读原文,即可报名!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
二、报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com
扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名
或者复制网址到浏览器后,微信注册报名:
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
