
2026年1月26日,上海纬钛科技有限公司(以下简称“纬钛机器人”)正式宣布,联合国家地方共建人形机器人创新中心(以下简称“国地中心”)发布全球首个最大规模的跨本体视触觉(Vision-Based Tactile Sensor)多模态数据集:白虎-VTouch。
白虎-VTouch的推出标志着机器人正从单纯的“感知体”向具备物理理解能力的“智能体”进化,不仅为具身智能补齐了缺失的物理理解拼图,更展示了纬钛机器人在全球视触觉传感技术领域的领航地位。
该数据集是目前全球范围内规模最大的跨本体视触觉多模态数据集,可以极大助力具身智能的快速发展,数据集全面开源,标志着具身智能时代 “ImageNet” 时刻的到来。
在具身智能的演进中,“触觉与接触”维度的缺失长期限制了机器人在真实物理环境中的表现 。白虎-VTouch的出现正是补齐具身智能 Scaling Law 关键缺失维度的系统性突破——我们把长期被忽略、却最本质的 「触觉与真实接触」 引入基础模型体系,打造更接近人类操作的VTLA大模型。加速机器人从“能看”走向“能触、能控、能稳态泛化”的真实世界部署进程。
· 规模空前:数据集规模超 60,000 分钟,是目前全球规模最大、模态最完整的视触觉多模态机器人操作数据集。
· 模态完整:包含视触觉传感器数据、RGB-D 数据、关节位姿数据等。
· 跨本体构型:涵盖了轮臂机器人(D-Wheel)、双足机器人(青龙)、手持智能终端等多种构型。
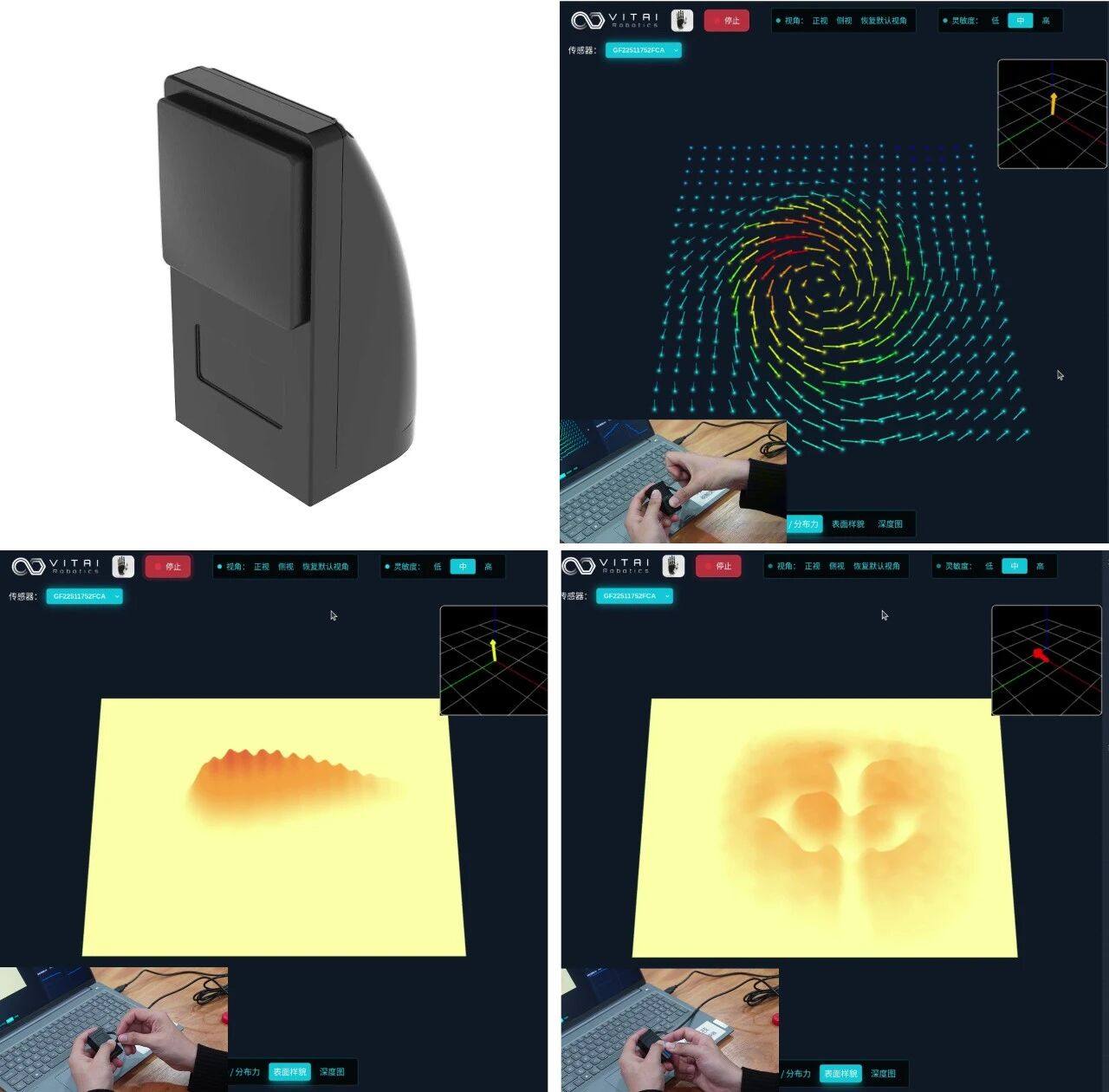
· 精细触觉:采用全球首款分辨率超越人类手指的视触觉传感器,支持最高 640×480 分辨率与 120Hz 刷新率,记录了约 9072 万对真实物体接触样本。

“白虎-VTouch”数据集能够实现超高精度记录触觉交互,核心在于使用了纬钛机器人自主研发的仿生指尖视触觉传感器(Vision-Based Tactile Sensor,VBTS)。
纬钛机器人起源于美国麻省理工学院(MIT)计算机科学与人工智能实验室,创始人李瑞博士与MIT导师Edward Adelson教授共同开创了视触觉技术路线,发明了全球第一款分辨率超越人类手指的视触觉传感器——GelSight指尖传感器,分辨率达传统触觉方案的上万倍,并可探测超灵敏的多维力信息,被全球学术界公认为最先进的触觉技术路径。

纬钛机器人以全球领先的视触觉传感和手眼协同技术为核心,推动机器人多模态感知和灵巧操控的范式革命,致力于打造真正“心灵手巧”的类人智能机器人,为全社会下一次生产力革命和智能升级提供坚实支撑。
该传感器是全球首款同时面向工业界与科研界并规模量产的、具备超人类触觉分辨率的视触觉传感器,实现了从科研到产业的重大跨越,在耐久性、稳定性、一致性等方面实现了巨大突破,广泛应用于科研与智能制造等场景。纬钛机器人通过创新视触觉技术与“手眼协同”理念,为机器人赋予了真正“心灵手巧”的多维感知与灵巧操作能力,彻底重塑了机器人在复杂环境中实现精细操作与泛化能力的技术边界。
纬钛视触觉传感器的核心优势:
· 超高分辨率:空间分辨率可高达10微米级,每平方厘米分布数万个触觉信息点。
· 多维力感知:支持法向力、切向力、力矩及物体位姿变化的实时捕获。
· 刚柔并济:具备如人类皮肤般的柔性,能处理从坚硬钢铁到柔软线缆、食品的各类物体。
· 工业级耐久:针对学术界产品耐用性痛点进行全面优化,纬钛机器人传感器可达到使用数百万次的性能。基于光学成像原理,不受温湿度或电磁干扰,在透明、反光等极端环境下依然稳定。
我们摒弃了传统低效的“单任务人工采集”模式,提出了“矩阵式”任务构建新范式 。填补了大规模、真实视触觉交互数据长期空白,为构建真正具备物理理解、精细操控与稳态泛化能力的具身基础模型,提供了不可替代的核心语料与工程底座。
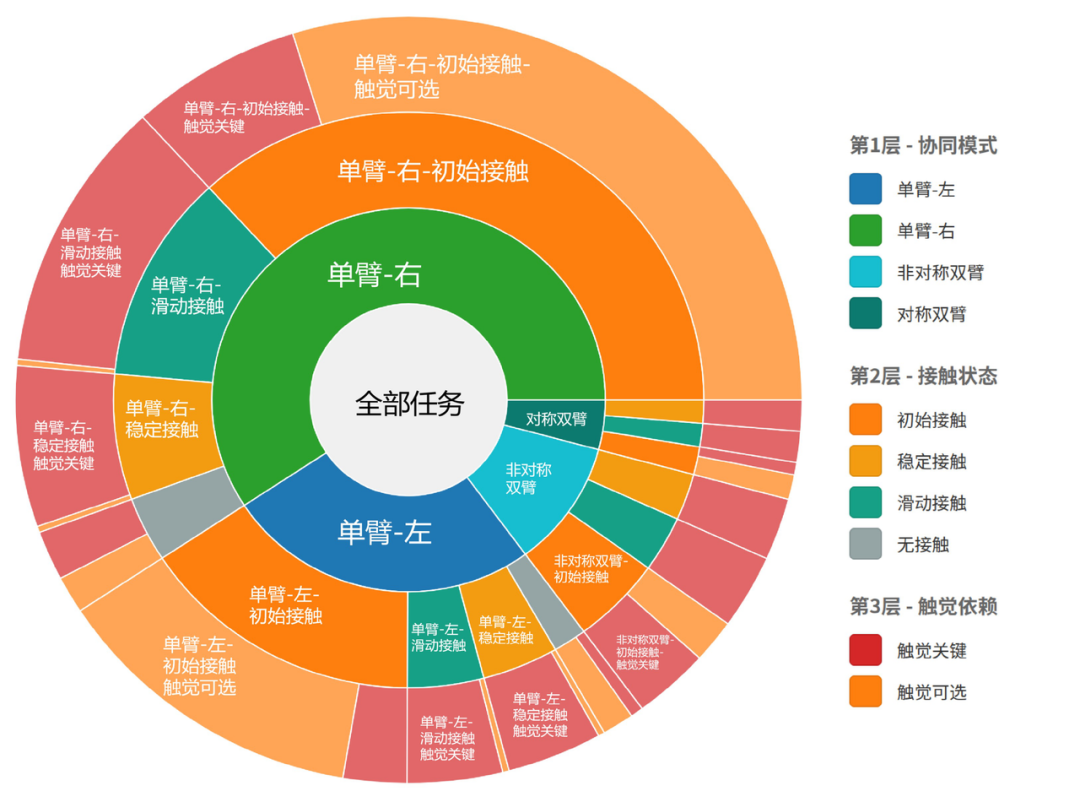
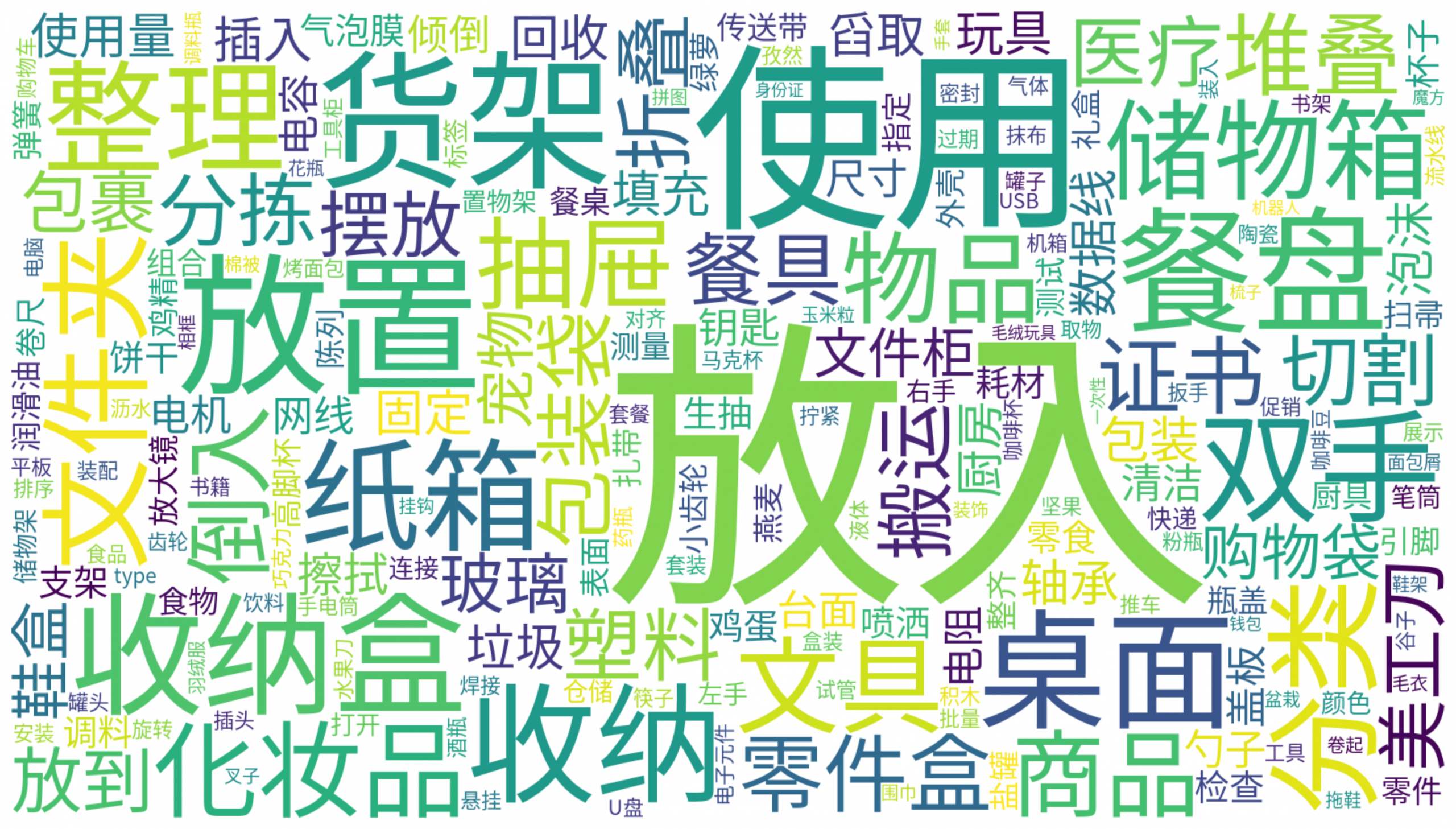
· 多维覆盖:覆盖家居家政、工业制造、餐饮服务、特种作业 4 大类真实场景 。
· 海量任务:包含 380+ 任务类型、100+ 原子技能、500+ 真实物品。
· 结构化学习:设计顺序遵循“协同模式→接触状态→触觉依赖”,确保机器人策略模型在精细感知和复杂双臂协作上实现系统性提升,而非简单的任务堆叠。
为了支撑如此大规模的数据需求,我们构建了全栈式的解决方案:
· 跨本体规模化数采平台:采用多进程架构,实现 100MB/s+ 实时采集,并通过双时间戳设计保证 10+ 种传感器的精确时序对齐。
· 具身标注体系:涵盖抽象思维层(理解“为什么”)、动作逻辑层(明白“怎么做”)和物理状态层(感受“做什么”),为下一代具身 VTLA 提供数据标准。
· 统一算法框架:构建了面向真实部署的训–推闭环,显著提升模型在真机上的稳定执行与安全控制能力。
跨本体规模化数采平台
国地人形作为国内人形机器人领域的核心 “国家队” 平台,在技术引领、生态构建、标准制定和场景落地等方面均处于领先地位,对推动中国具身智能与机器人产业的自主化、规模化发展具有关键作用。
基于白虎-VTouch数据集,纬钛机器人将与国地人形持续推进具身VTLA模型研究,深度绑定矩阵式任务设计、多层次语义标注与统一算法框架。充分释放数据集价值,构建从数据到决策、从理解到执行的完整具身智能生态,推动机器人在真实复杂场景中的能力跃迁。
目前,第一批 6,000 分钟的开源数据已在 OpenLoong 开源社区上线。

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
