
引 言
随着机器人技术在工业制造、医疗健康、服务与人机协作等领域的快速发展,末端执行器的性能已成为制约机器人操作能力的重要因素。其中,灵巧手作为最具代表性和挑战性的末端执行部件,其结构设计直接决定了系统在抓取力、操作精度、灵巧性以及环境适应性等方面的综合性能。在有限体积和质量约束条件下,如何在高自由度、高精度、高柔顺性与高可靠性之间实现合理平衡,是灵巧手结构设计面临的核心问题。

目前,工程实践和学术研究中形成了以连杆驱动结构、腱绳驱动结构和直驱结构为代表的三类主流技术路线。三种结构方案在传动路径、执行器布局、力传递方式及控制复杂度等方面存在显著差异,各自具有不同的性能优势和应用边界。为明确不同结构形式的适用特征与选型依据,本文对上述三种灵巧手结构进行了系统对比分析,从结构原理、性能优劣、应用场景及未来发展趋势等方面展开深入讨论,为后续灵巧手设计与工程选型提供参考依据。
三大结构优劣分析
灵巧手(Dexterous Hand)是服务机器人、工业协作机器人、假肢及远程操作系统中的核心执行部件,其设计目标是在有限体积和质量约束下,实现高自由度、高精度、高柔顺性和高可靠性的抓取与操作能力。
目前主流的机械结构方案主要包括三类:
1. 连杆驱动型灵巧手(Linkage-driven)
2. 腱绳驱动型灵巧手(Tendon-driven / Cable-driven)
3. 直驱型灵巧手(Direct-drive)
三种方案在传动路径、执行器布局、力传递方式和控制复杂度方面存在本质差异。
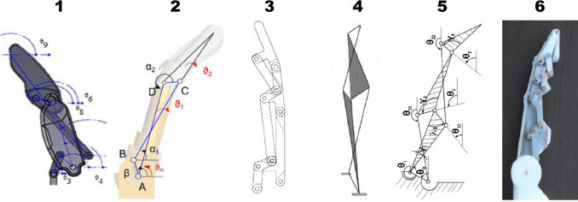
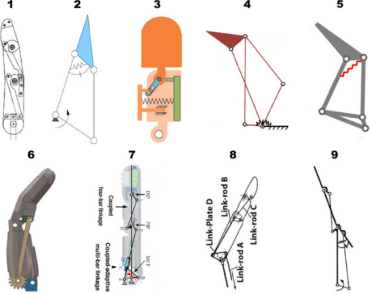
1.1 连杆结构灵巧手:结构稳定但灵活性受限
1.1.1 结构原理
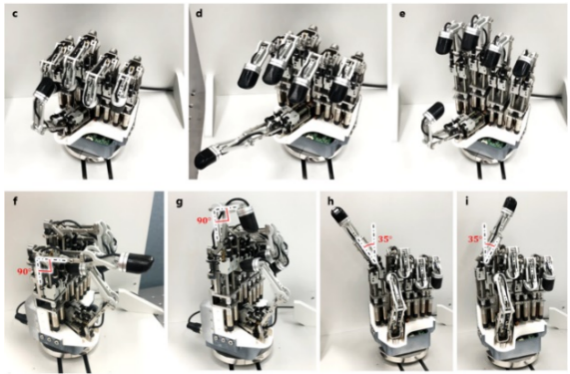
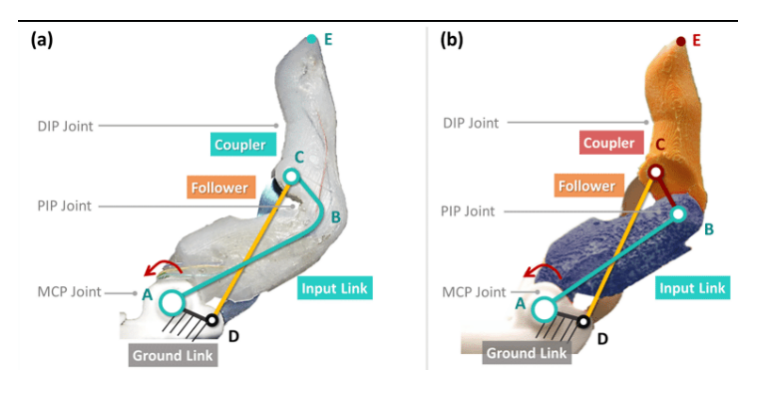
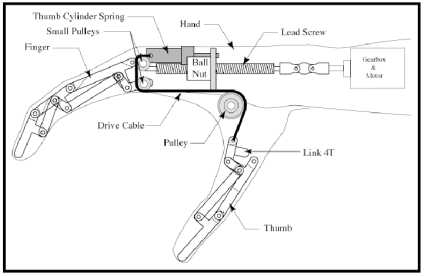
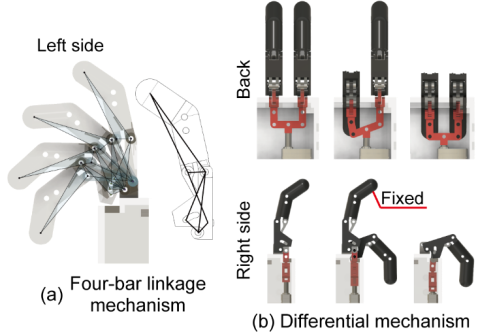
连杆驱动灵巧手通过刚性杆件、齿轮、凸轮或差动机构将电机输出直接传递至指关节。驱动系统通常与关节一一对应,或通过机械耦合实现多关节联动。
1.1.2 优势分析
-
结构形式简单,机械可靠性高
连杆结构采用刚性机械元件(如连杆、齿轮、轴承等)进行力和位移传递,传动路径明确、结构形式成熟,制造和装配工艺稳定。相比柔性传动方式,刚性连杆不易发生疲劳断裂、打滑或张力衰减问题,能够在较长工作周期内保持稳定的性能输出。
-
承载能力强,适合高负载工况
由于连杆系统具有较高的结构刚度和较小的弹性变形,在承受较大抓取力或持续外载荷时,关节位置偏差较小,力输出稳定,适用于需要长时间夹持或搬运重物的任务场景。
-
环境适应性强,抗污染能力好
连杆结构多采用封闭式或半封闭式传动机构,对粉尘、油污和湿度等环境因素不敏感,不易因外部污染导致传动性能下降,因此在工业现场等复杂环境中具备较高的适应性。
1.1.3 劣势分析
-
自由度和灵巧性受限
连杆结构需要在有限空间内布置多个刚性传动部件,随着自由度增加,机构复杂度和体积迅速上升,这在实际工程中限制了其可实现的关节数量和运动范围,难以实现类似人手的高自由度协同运动。
-
顺应性不足,对复杂物体适应能力弱
刚性传动结构缺乏天然的柔顺特性,在接触不规则或易损物体时,难以通过被动变形实现自适应抓取,通常需要额外引入复杂的控制策略或弹性元件来弥补。
-
仿生能力有限
由于连杆系统难以复现人类肌腱—骨骼系统中多肌腱协同驱动的特性,其动作模式相对机械化,不适合对操作精细度和自然性要求较高的应用。
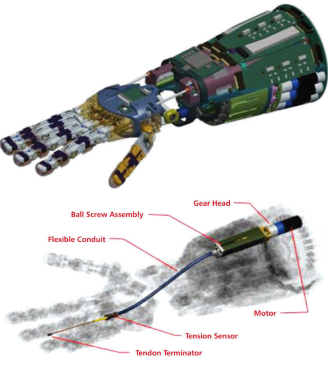
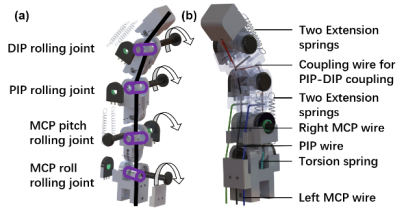
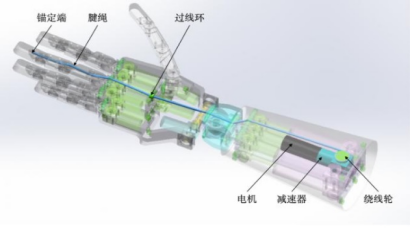
1.2 腱绳结构灵巧手:仿生能力强但控制复杂
1.2.1 结构原理
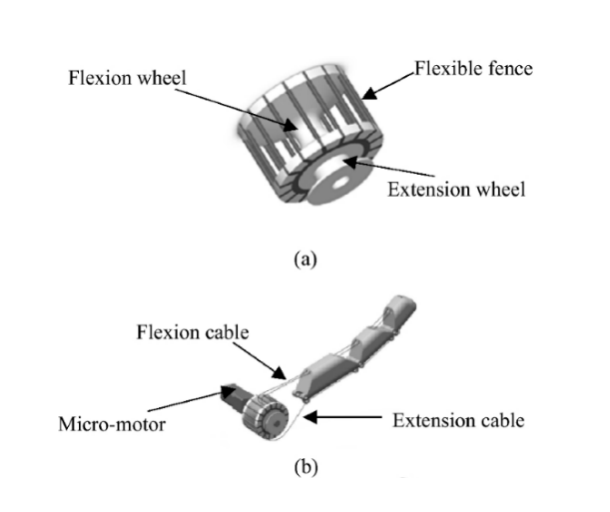
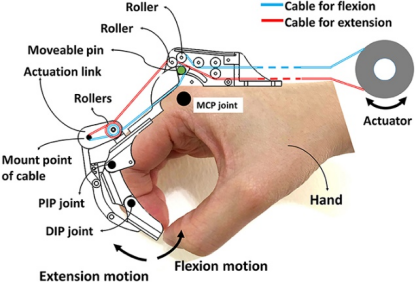
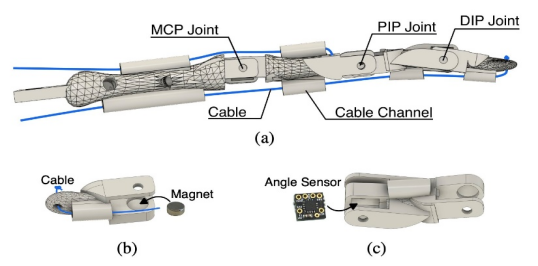
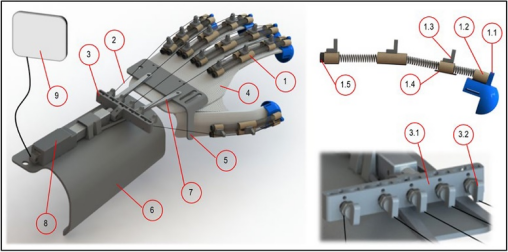
腱绳驱动灵巧手模仿人类肌腱结构,通过钢丝绳或高强度纤维绳将电机力矩远程传递至手指关节。执行器通常集中布置在前臂或掌部。
1.2.2 优势分析
-
灵巧性高,自由度扩展能力强
腱绳结构通过柔性绳索远程传动,可将驱动器集中布置在手掌或前臂位置,从而显著减轻指部质量,使得在有限空间内实现多关节、高自由度结构成为可能,适合复杂抓取和精细操作任务。
-
对不同形状和尺寸工件的适应能力强
腱绳本身具有一定弹性和可变形特性,在抓取过程中能够通过张力分配实现多关节协同弯曲,使手指自然贴合物体表面,从而提升对不规则、未知物体的包络抓取能力。
-
柔顺性好,人机交互安全性高
柔性传动链路在发生碰撞或过载时能够起到缓冲作用,降低瞬时冲击力,有利于提升系统的安全性,特别适用于服务机器人和人机协作场景。
1.2.3 劣势分析
-
系统可靠性相对较低
腱绳在长期运行中容易出现磨损、疲劳和断裂问题,且张力会随时间发生变化,导致传动特性漂移,影响控制精度和稳定性。
-
维护与调试成本较高
腱绳系统对张紧度和走线布局高度敏感,需要定期校准和更换,维护工作量大,不利于大规模工业化应用。
-
不适合恶劣工业环境
在粉尘、油污或高湿环境中,腱绳容易受到污染而加剧磨损或产生打滑,严重时会导致系统失效,因此环境适应性相对较弱。
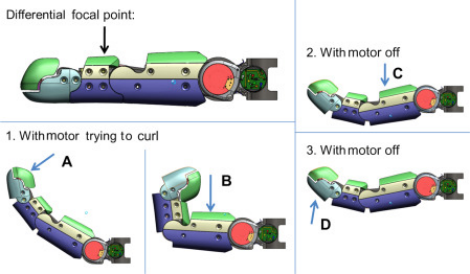
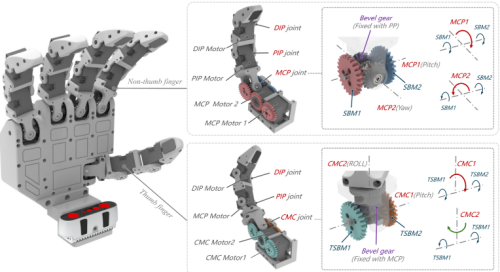
1.3 直驱结构灵巧手:控制精准但系统代价高
1.3.1 结构原理
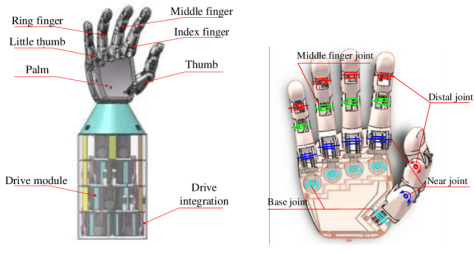
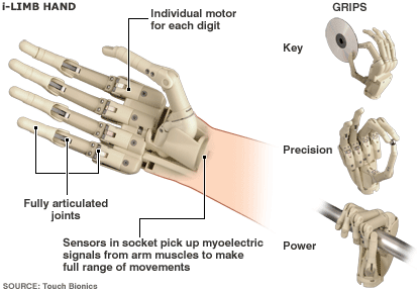
直驱灵巧手将电机直接集成于关节轴上,取消中间传动结构,实现“电机—关节”一体化设计,常采用高转矩密度电机。
1.3.2 优势分析
-
运动和力控制精度高
直驱结构将电机直接与关节轴连接,消除了齿轮、绳索等中间传动环节带来的间隙、摩擦和弹性变形,使关节角度与电机输出高度一致,便于实现高精度的位置控制和力控制。

-
动态响应快,控制带宽高
由于传动链路短且惯性可预测,直驱系统在快速启停和微小动作调节方面具有明显优势,能够胜任高频率、精细化的操作任务。
-
适合精细操作与力觉反馈应用
直驱结构在力反馈建模和阻抗控制方面具有天然优势,广泛用于遥操作、医疗机器人等对触觉和操作精度要求极高的领域。
1.3.3 劣势分析
-
系统成本较高
直驱灵巧手通常需要高转矩密度、高性能的电机及配套驱动器,制造和采购成本显著高于其他结构形式,不利于成本敏感型应用。
-
结构集成与维护复杂
电机直接集成于关节内部,对散热、密封和可靠性设计要求高,一旦发生故障,维修和更换难度较大。
-
环境适应性受限
直驱系统对粉尘、油污和湿度较为敏感,若防护措施不足,容易影响电机和传感器的正常工作,因此不适合在污染严重的工业现场长期使用。
从工程应用角度看:
-
连杆结构侧重于可靠性和承载能力,适合规则、重复的工业任务;
-
腱绳结构强调灵巧性与仿生性,适用于复杂、非结构化环境;
-
直驱结构追求极致精度和控制性能,更适合高端精密操作场景。
三种结构方案的
综合评价与选择建议
2.1 综合评价
基于前述对连杆结构、腱绳结构和直驱结构在机械特性、控制性能、可靠性及环境适应性等方面的系统分析,可以从力学性能、控制难度、工程实现成本和应用适配性等维度,对三种结构方案进行综合评价。
2.1.1 连杆结构灵巧手的综合评价
-
优点分析:
连杆结构灵巧手具有较大的抓取力和较高的系统刚度,能够在承受较大负载时保持稳定的结构形态和关节位置精度。其传动方式以刚性元件为主,机械结构成熟,长期运行可靠性强,且制造工艺成熟、成本可控,维护方式简单,适合规模化部署。
-
缺点分析:
受限于连杆和齿轮等刚性机构的体积和布置方式,其可实现的自由度数量有限,难以在有限空间内集成高自由度关节结构。同时,系统柔顺性不足,导致在精细操作和复杂物体抓取时的适应能力有限,运动精度和动态响应性能一般。
-
适用场景分析:
该结构方案适合对抓取力、刚度和可靠性要求较高,而对灵巧性和操作精细度要求相对较低的应用场景,如工业制造、装配线作业以及重复性强、环境条件较为恶劣的工业任务。
2.1.2 腱绳结构灵巧手的综合评价
-
优点分析:
腱绳结构通过柔性传动方式实现远程驱动,显著降低了指部重量,使系统能够在有限空间内实现多自由度设计,具备优异的灵巧性和操作适应性。其柔顺特性使得灵巧手在抓取不同形状和尺寸工件时能够自然贴合物体表面,适应性强,整体成本处于中等水平。
-
缺点分析:
由于腱绳存在弹性、摩擦和张力变化等非线性因素,其抓取力和系统刚度相对较低,难以长期稳定输出大抓取力。同时,腱绳易磨损,对调试和维护要求较高,系统可靠性受运行环境影响较大。
-
适用场景分析:
腱绳结构更适合对灵巧性和自由度要求高、对抓取力要求相对较低的应用场景,如医疗手术辅助、康复机器人、服务机器人以及仿生操作研究领域。
2.1.3 直驱结构灵巧手的综合评价
-
优点分析:
直驱结构灵巧手通过将驱动电机直接集成于关节轴上,消除了中间传动环节带来的间隙和非线性问题,具备较高的位置和力控制精度,动态响应速度快,控制性能优越,适合执行精细化操作任务。从系统建模角度看,其运动学和动力学关系清晰,有利于实现高性能控制算法。
-
缺点分析:
直驱结构对电机性能要求高,导致系统成本显著增加。同时,电机直接布置在关节处,使得整体重量和体积较大,对结构集成和散热设计提出更高要求,维护难度相对较大。
-
适用场景分析:
该结构方案适用于对精度、响应速度和控制性能要求极高,而对成本和维护复杂度容忍度较高的高端应用场景,如高精度装配、遥操作系统及科研平台。
2.2 选择建议
2.2.1 工业制造与装配场景
1) 推荐结构: 连杆结构或直驱结构
2) 理由分析:
工业制造与装配任务通常强调抓取力、重复定位精度和系统可靠性。连杆结构在成本、可靠性和环境适应性方面具有明显优势,能够满足大多数工业场景需求;直驱结构则在精度和响应速度方面表现突出,适合高精度、高节拍的装配任务。

3) 具体建议:
-
对于一般工业制造与装配任务,优先推荐连杆结构;
-
对于高精度、高速度或微装配场景,推荐采用直驱结构;
-
随着任务复杂度提升,应相应提高灵巧手的自由度配置。
2.2.2 医疗手术与康复场景
1) 推荐结构: 腱绳结构(必要时结合直驱结构)
2) 理由分析:
医疗手术和康复场景对操作灵巧性、安全性和精细度要求极高。腱绳结构具备良好的柔顺性和高自由度,能够实现复杂、细微的操作动作,降低对人体组织的潜在伤害风险;在部分高精度操作环节,可结合直驱结构以提升控制精度。
2.2.3 服务机器人与家庭场景
1) 推荐结构: 腱绳结构或连杆结构
2) 理由分析:
服务机器人和家庭应用需要兼顾灵巧性、适应性、成本和可靠性。腱绳结构适合高端服务机器人,能够完成复杂抓取和交互任务;连杆结构则更适合经济型产品,具有成本低、维护简单的优势。
3) 具体建议:
-
高端服务机器人:优先采用腱绳结构;
-
大规模普及型或成本敏感型产品:推荐采用连杆结构。
2.2.4 特殊环境与危险场景
1) 推荐结构: 连杆结构或直驱结构
2) 理由分析:
特殊环境和危险场景通常对系统可靠性、稳定性和抗干扰能力要求较高。连杆结构在恶劣环境下具备较强的稳定性;直驱结构则在高风险任务中提供更高的操作精度和响应能力。
3) 具体建议:
-
一般特殊环境任务:推荐采用连杆结构;
-
高精度、高风险操作任务:推荐采用直驱结构。
2.3 未来发展趋势
2.3.1 连杆结构的发展趋势
1) 未来趋势:
连杆结构将向轻量化、高精度和模块化方向发展,通过新型材料和先进制造工艺降低系统重量、提升结构性能。
2) 创新方向:
-
可重构连杆机构,实现抓取模式的动态切换;
-
引入智能材料(如形状记忆合金),增强运动灵活性和自适应能力。
2.3.2 腱绳结构的发展趋势
1) 未来趋势:
腱绳结构将向高精度、高可靠性和智能化方向发展,重点解决非线性传动和维护成本高的问题。
2) 创新方向:
-
自张紧腱绳系统,降低维护频率;
-
融合柔性电子与分布式传感,实现高精度触觉和力反馈。
2.3.3 直驱结构的发展趋势
1) 未来趋势:
直驱结构将向高扭矩密度、高效率和低功耗方向演进,提升系统集成度和能源利用效率。
2) 创新方向:
-
集成化直驱模块,降低体积和重量;
-
结合人工智能与机器学习,实现更智能的抓取与操作控制。

综合来看,三种灵巧手结构方案各具优势,其选择应基于具体应用场景需求,在性能、成本和可靠性之间进行系统权衡。未来灵巧手的发展趋势将更加注重结构、控制与智能感知的深度融合。
综上所述,连杆结构、腱绳结构和直驱结构代表了灵巧手设计中三种不同的技术取向,分别在可靠性与承载能力、灵巧性与仿生性、精度与控制性能等方面具有明显优势。连杆结构以其成熟可靠、成本可控和环境适应性强的特点,在工业制造与装配场景中仍具有不可替代的地位;腱绳结构凭借高自由度和良好的柔顺性,在医疗、服务机器人及复杂非结构化环境中展现出独特优势;直驱结构则以卓越的精度和动态性能,成为高端精密操作和科研平台的重要选择。

需要指出的是,灵巧手结构方案的选择不存在绝对优劣,而应紧密结合具体应用场景,在性能需求、成本约束、可靠性和维护复杂度之间进行系统权衡。随着新材料技术、高性能电机、先进控制算法以及人工智能技术的不断发展,未来灵巧手的设计趋势将更加注重多种驱动方式的融合、结构与控制的协同优化以及智能感知能力的深度集成。通过系统级设计方法,构建兼具高性能与高适应性的灵巧手,将成为该领域持续研究的重要方向。
参 考:
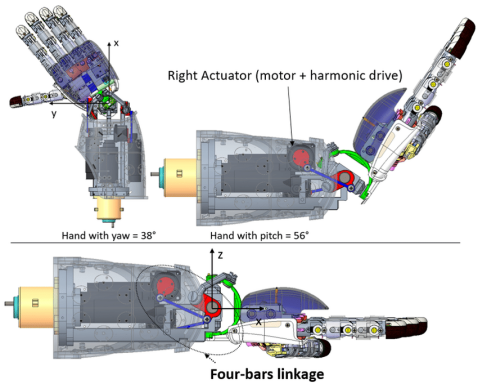
1. Design of a Compact Anthropomorphic Robotic Hand with Hybrid Linkage and Direct Actuation | Springer Nature Link
(a) Compliant four-bar linkage mechanism (b) Conventional fourbar... | Download Scientific Diagram
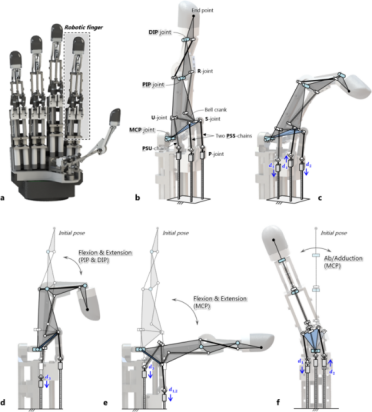
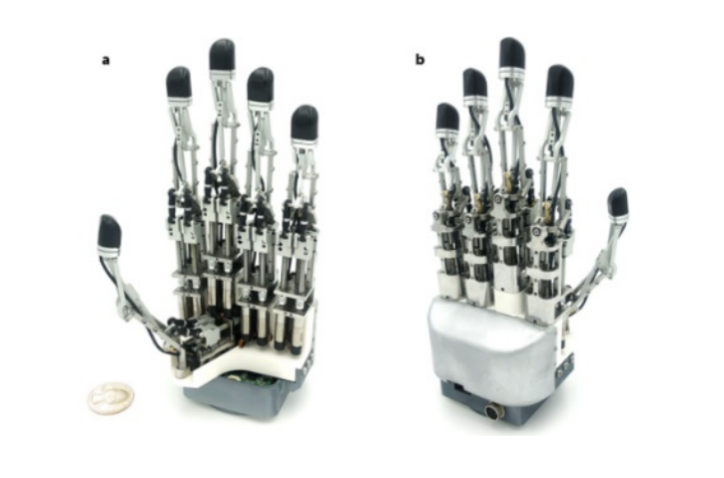
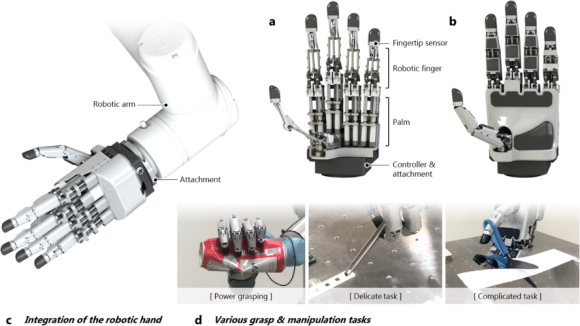
2. Integrated linkage-driven dexterous anthropomorphic robotic hand | Nature Communications
3. Integrated linkage-driven dexterous anthropomorphic robotic hand | Nature Communications
4. https://neurips.cc/virtual/2025/loc/san-diego/poster/117884
5. Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability | MDPI
6. Advanced Humanoid Robotic Hand Technologies - Tech Briefs
7. [2309.14860] A Wearable Robotic Hand for Hand-over-Hand Imitation Learning
8. A human-inspired robotic hand based on a modular structure
9. The finger movement of the Schunk 5 Fingered Hand are illustrated. | Download Scientific Diagram
10. Dexterous Robotic Finger Can Withstand Physical Impacts | Industrial Equipment News
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
