
本文将对灵巧手的行业概况、发展趋势、竞争格局等进行梳理,以供参考。
注*:本文约9500字,阅读完需18min
本文目录如下
1、行业概况:具身智能核心执行终端,市场快速扩张
1.1 灵巧手:集驱动、传动、感知于一体的高精度末端执行器
1.2 发展历程:产品演进五十余年,向更高仿生度、感知能力和轻量化方向迭代
1.3 设计结构:电驱为主流,传动方案及自由度尚未收敛
1.4 市场空间:整机价值量占比或达17.98%,预计销量快速增长
2、发展趋势:腱绳传动刚柔并济,电子皮肤赋能感知
2.1 腱绳传动打破机器人灵巧手多重性能权衡的困境
2.2 传感器赋予多维感知能力,触觉、力觉传感器为高价值量方向
1、行业概况:具身智能核心执行终端,市场快速扩张
1.1 灵巧手:集驱动、传动、感知于一体的高精度末端执行器
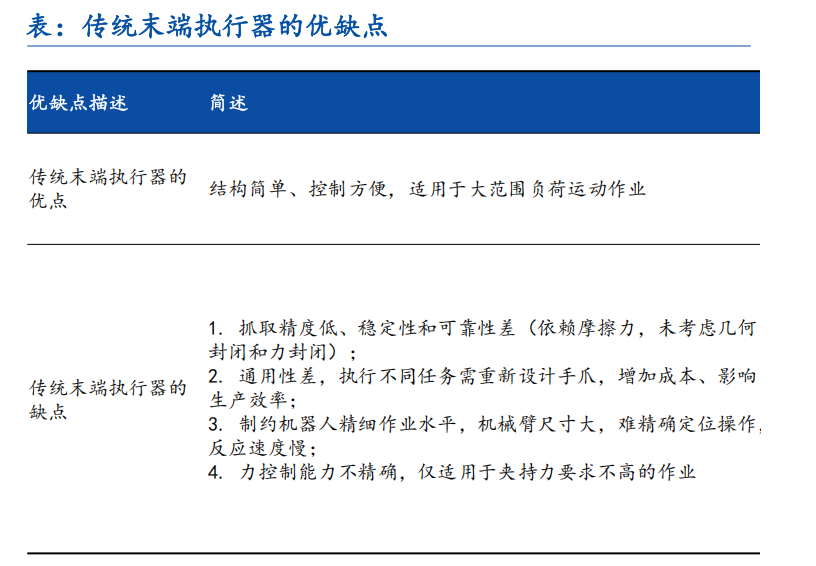
灵巧手是集多方面功能于一体的高精度末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,主要由驱动、传动、感知三大模块组成。人的双手经过长期劳动进化完美,可应用于不同场合完成不同工作任务,具备充分的泛化性。传统末端执行器具备结构简单、便于控制、适用于大范围负荷运动作业等优点,但是也存在通用性差、精度不足、可靠性欠缺等一系列缺点。灵巧手是集成驱动、传动、感知等多方面功能于一体的高精度末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,主要由驱动、传动、感知三大模块组成。从运动学的观点看,人形机器人灵巧手需满足两个条件:指关节运动时能使物体产生任意运动、指关节固定时能完全限制物体的运动,这意味着人形机器人灵巧手至少要3个手指和9个自由度。

1.2 发展历程:产品演进五十余年,向更高仿生度、感知能力和轻量化方向迭代
灵巧手是机器人操作和动作执行的末端工具,行业演进五十余年,2010年后相关研究加速,目前正向更高仿生度、更强感知能力和轻量化方向发展。1974年, 日本电工实验室研发的Okada灵巧手n1是严格意义上的第一款灵巧手,由3个手指组成,共11个自由度;20世纪80年代,灵巧手研究大幅增加,以斯坦福大学研发的Stanford Hand为代表,其具有3个手指9个自由度,单只手指采用4个电机驱动,并利用N+1腱传动结构控制N个自由度,同时能够保证腱具有正张力。2016年,华盛顿大学基于仿生设计原理研制出一款灵巧手,质量小于1kg,利用人造关节囊、韧带、肌腱和弹性滑轮结构设计,使得人手的韧带和关节特征得以复现,抓取也更加灵活可靠。2021年,韩国的科研团队研发了一种集成连杆驱动的灵巧手ILDA,共有15个自由度(20个关节)、34N的指尖力,结构紧凑,无须外置驱动部件,质量仅为1.1kg,在手指关节处安装有触觉传感器,具备感知能力,可以轻松抓取鸡蛋,并可完成剪纸、夹装芯片和挤压瓶罐等操作。整体来看,灵巧手产品在向更高仿生度、更强感知能力、轻量化的方向迭代。



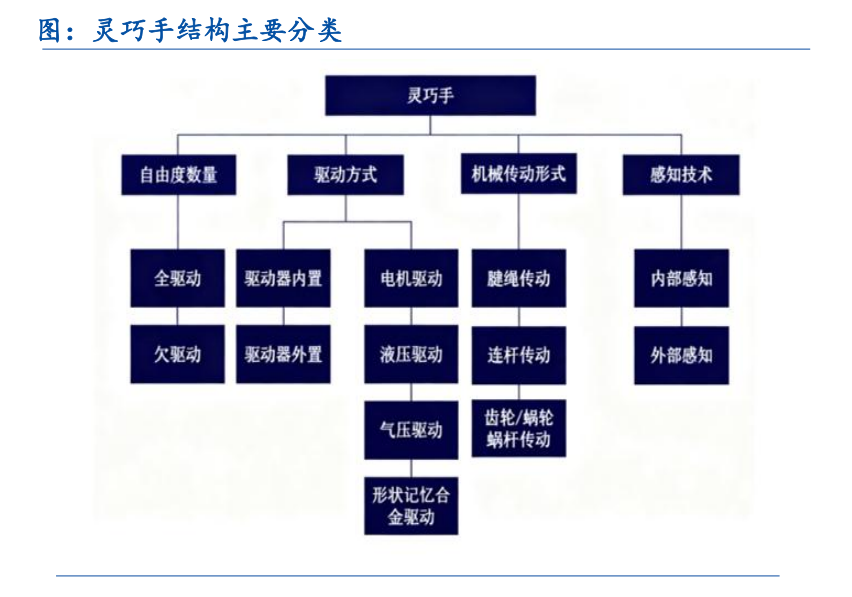
1.3 设计结构:电驱为主流,传动方案及自由度尚未收敛
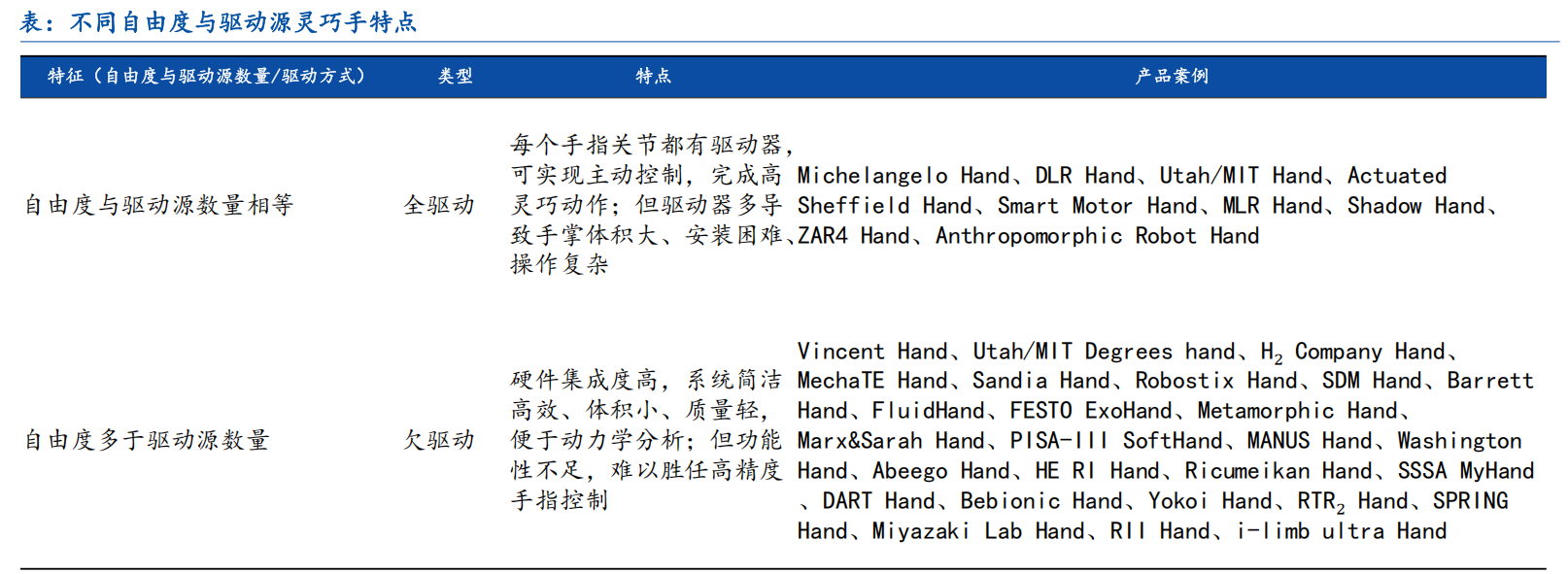
根据自由度与驱动源数量,可将灵巧手分为全驱动和欠驱动两大类,其中全驱动灵巧手灵巧程度更高但对手掌体积、安装提出更高要求,欠驱动灵巧手硬件集成度以及轻量化程度高,但存在功能性不足以及精巧控制能力存在提升空间等特点。全驱动灵巧手驱动源的数量与被控制灵巧手的自由度数量相等。每个手指关节都有驱动器,使其能够实现主动控制,在某种程度上能够像人手一样完成全部的动作指令甚至要求更高的灵巧动作。但是,全驱动也意味着需要更多的驱动器,会使手掌体积变大、安装困难、操作复杂。欠驱动灵巧手被控制的自由度多于驱动源的数目,缺少驱动源的部分则进行耦合随动。欠驱动手硬件集成度高,整体系统简洁高效、体积小、质量轻,便于进行动力学分析。但是,欠驱动机械手的高集成性一定程度上也是牺牲高自由度性能的结果,存在功能性不足的问题,尤其是对于精度要求比较高的手指精巧控制无法胜任。

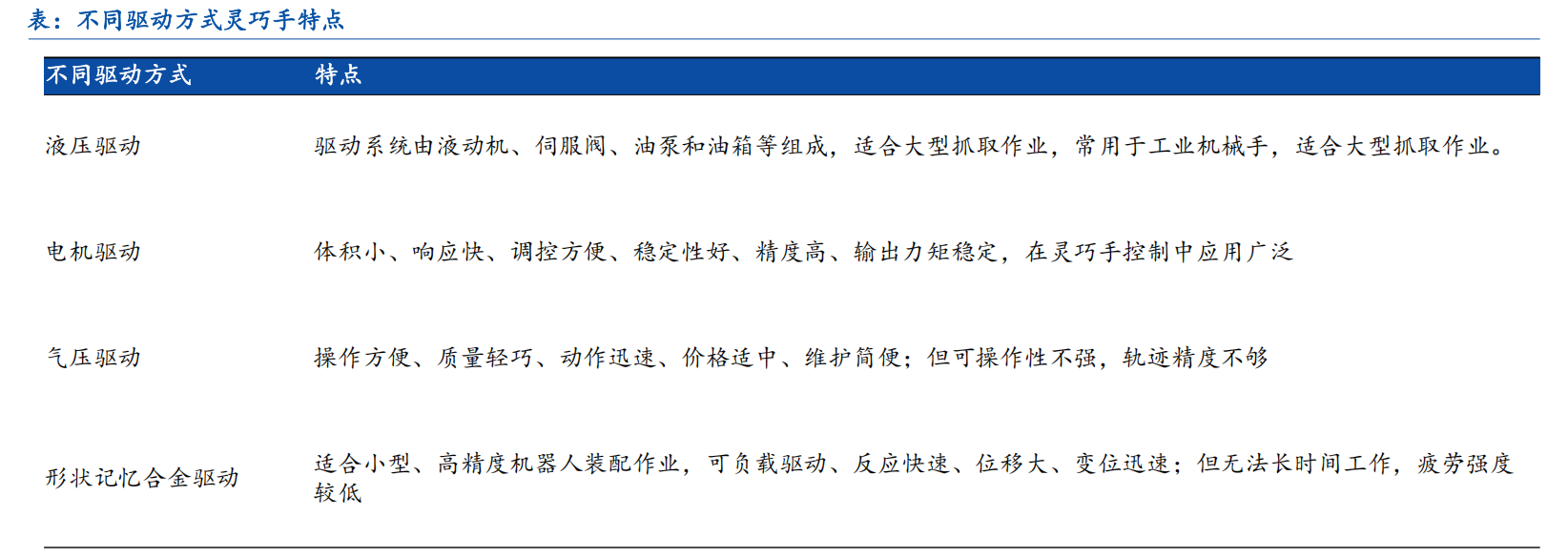
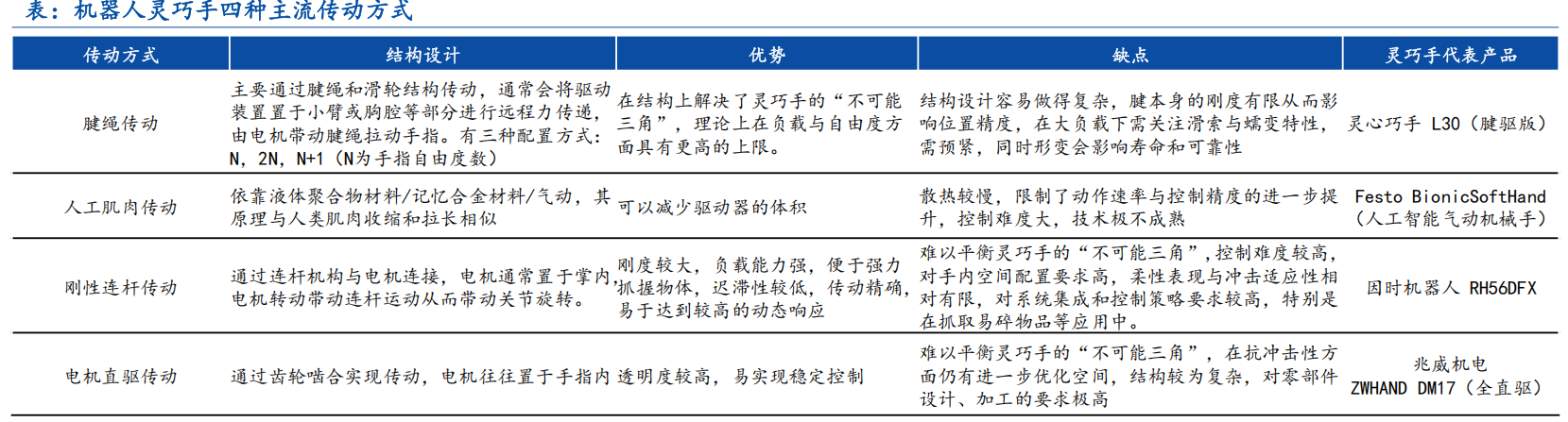
电机驱动具备体积小、响应快,调控方便、稳定性好、精度高、输出力矩稳定等优点,成为灵巧手的主流驱动方式。灵巧手主要的驱动方式包括4种:液压驱动、电机驱动、气压驱动、形状记忆合金驱动。其中液压驱动、气压驱动、形状记忆合金驱动适用场景存在精度不足、疲劳强度低等缺点,与灵巧手的高精度、使用寿命高要求需求难以匹配,电机驱动具备体积小、响应快,调控方便、稳定性好、精度高、输出力矩稳定等优点,更加适合灵巧手的使用。目前人形机器人主流灵巧手均为电机驱动。

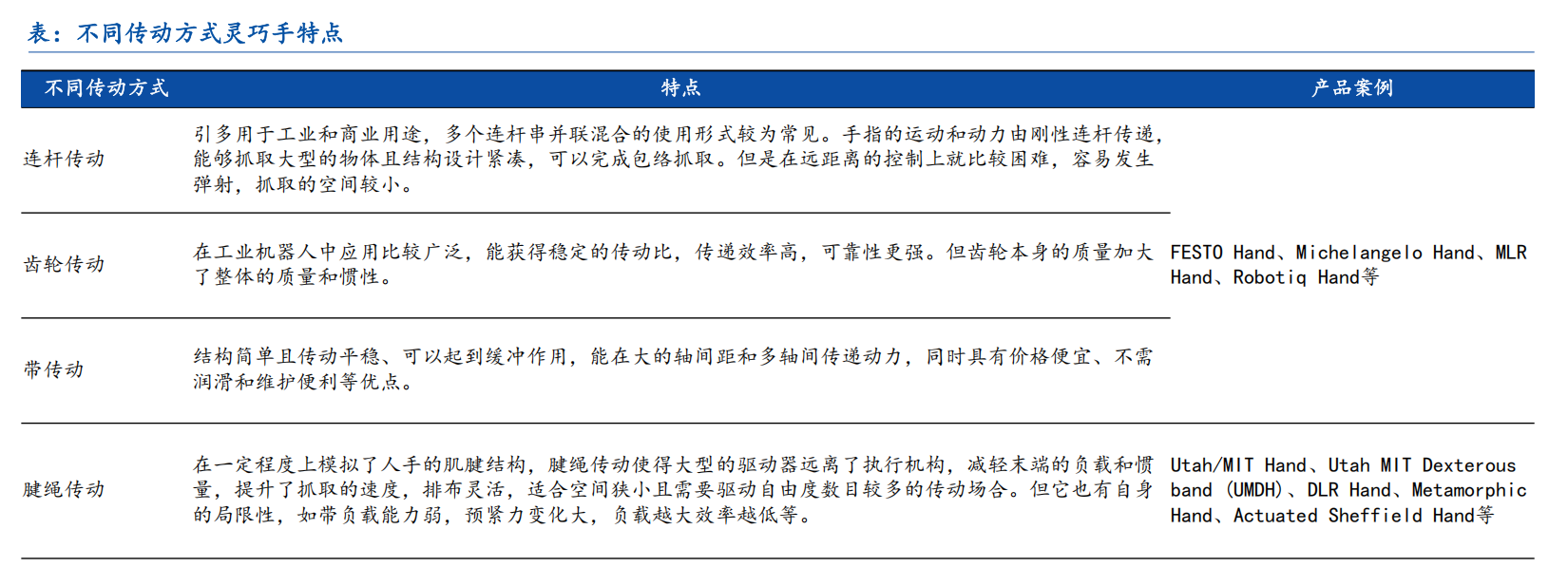
机械传动机构的选择对于灵巧手的性能至关重要。一方面决定了机械设计的复杂程度以及成本,另一方面则直接影响灵巧手传动的效率和可靠性。灵巧手的主要传动方式有连杆传动、齿轮传动、带传动以及腱绳传动,其中连杆传动以及腱绳传动为主流趋势。连杆传动能够抓取大型的物体且结构设计紧凑,可以完成包络抓取,但是在远距离的控制上就比较困难,容易发生弹射,抓取的空间较小。腱绳传动在一定程度上模拟了人手的肌腱结构,腱绳传动使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度,排布灵活,适合空间狭小且需要驱动自由度数目较多的传动场合。

1.4 市场空间:整机价值量占比或达17.98%,预计销量快速增长
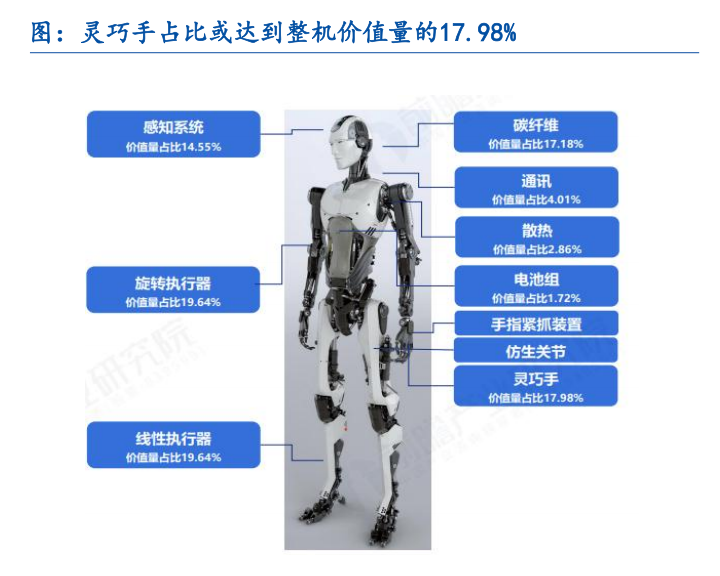
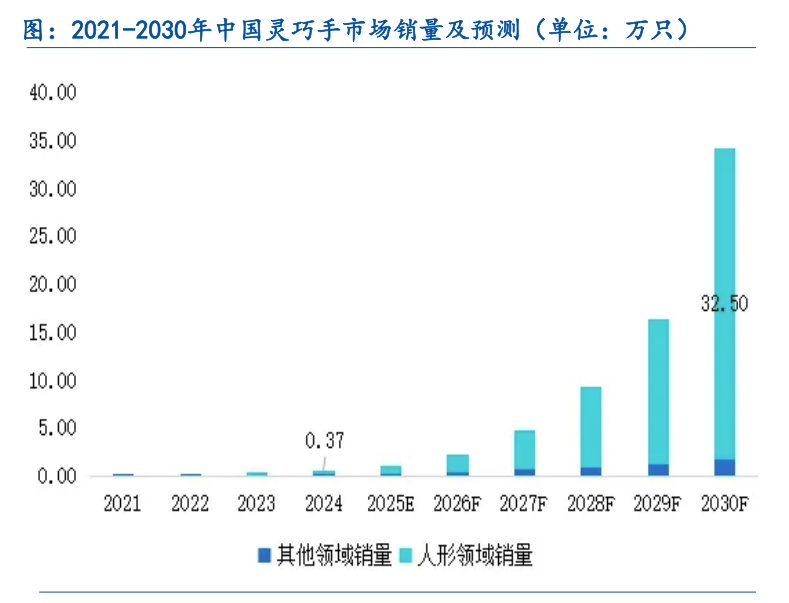
灵巧手占据整机价值量或达17.98%,销量或以90% CAGR快速增长。 目前业界将灵巧手视为解决人形机器人规模化落地应用“最后一厘米”的关键末端执行器,占据整机价值量或达17.98%。根据高工机器人产业研究所(GGII)数据,2024年中国机器人灵巧手市场销量约0.57万只,预计到2030年,中国机器人灵巧手市场销量将有望突破34万只,2024-2030年CAGR约为90%。当前灵巧手行业仍处于起步阶段,随着材料、电机、传动、运控、传感等技术的持续进步与提升,灵巧手实质性产业化的拐点有望加快到来。

2、发展趋势:腱绳传动刚柔并济,电子皮肤赋能感知
2.1 腱绳传动打破机器人灵巧手多重性能权衡的困境
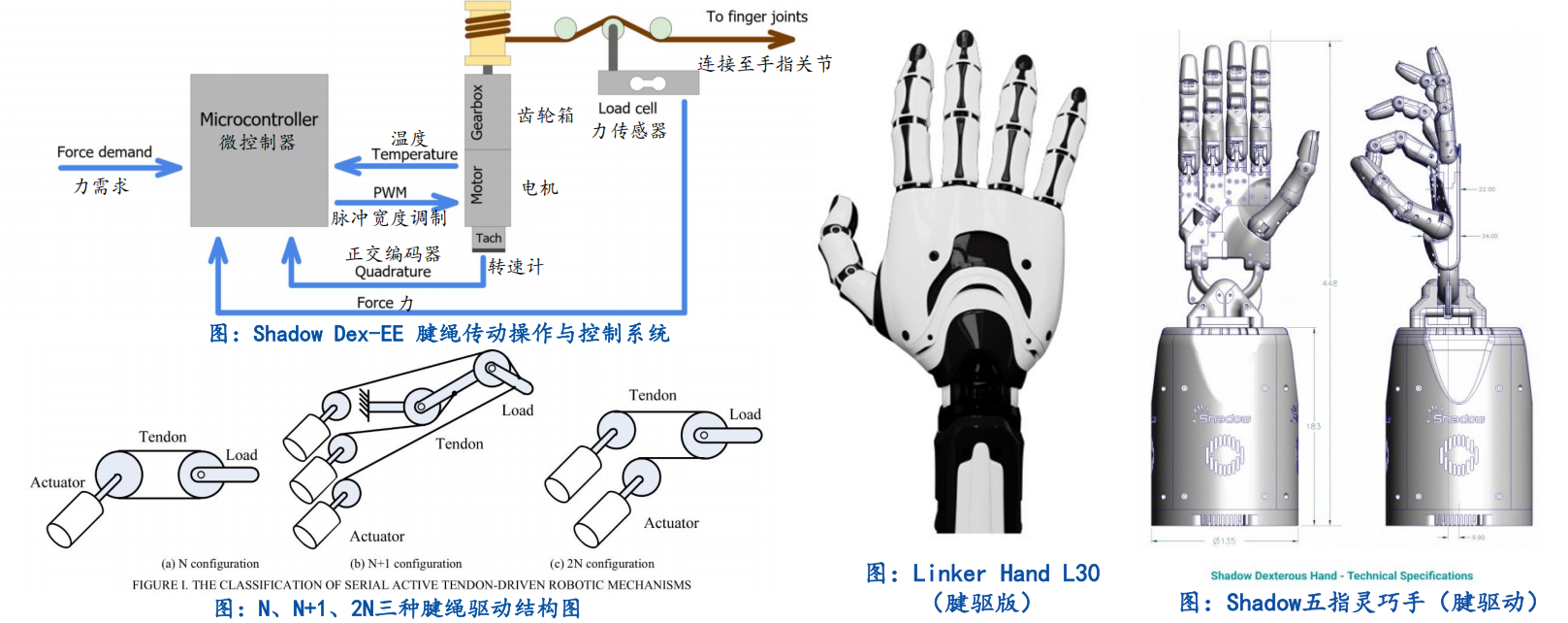
腱绳具备轻量化、柔性化等优势。当前国内主流采用的连杆传动方案虽具备双向控制、耐用性强、制造维护便捷等优势,但其结构笨重、柔性不足、抗冲击性弱等固有缺陷正成为技术升级的瓶颈。常见传动方案中,腱绳传动是一种通过柔性肌腱实现动力传递的机器人灵巧手关节驱动方案。由于灵巧手对紧凑性的严苛要求,电机、减速器等大体积驱动组件难以集成到有限的手部空间内。腱绳传动可将驱动单元外置于前臂或机身,通过腱绳和滑轮结构将动力传递至手指关节。虽然腱绳传动具备轻量柔性等优势,但在实际应用中仍存在一定挑战:布线复杂、需配备张力感知机构,以及滑轮系统中的摩擦问题等,对性能表现带来一定影响。在高自由度设计中,系统体积和集成难度较大,例如Utah/MIT手需大量滑轮与独立驱动空间;而Pisa/IIT SoftHand虽简化驱动,却在精度上有所妥协。
腱绳主流应用材料为超高分子量聚乙烯纤维(UHMWPE)。 目前主流材料为超高分子量聚乙烯纤维(UHMWPE),具备超高强度(13倍于钢)、极低密度、优异耐磨性与化学稳定性。不过,长期处于辐射与机械载荷作用下会导致结晶度上升,从而影响韧性与摩擦学性能,限制其使用寿命与可靠性。因此,科研机构和企业正通过表面改性与复合工艺手段进行优化,推动其在高精度、高耐久场景下的可靠应用。此外,腱绳传动可根据每个关节驱动器数量分为N型、N+1型和2N型三种配置,适配不同自由度与控制策略。相较其他方案,其轻量化优势显著,同时支持欠驱动设计,能提升抓握灵活性与适应性。正因如此,腱绳传动被认为是当前最有可能突破灵巧手“不可能三角 ”(成本—系统参数—稳定性)限制的技术路径。 目前该技术已广泛应用于机器人灵巧手及仿人机器人等领域,不同配置方案为开发者在自由度、紧凑性和控制精度等关键指标之间提供了多样化的选择空间。

典型应用案例包括采用2N型滑轮传动系统的Utah/MIT灵巧手和Awiwi灵巧手,具备高强度、低摩擦的传动特性,而Shadow马达灵巧手采用N型配置则实现了更紧凑的结构设计(Shadow Dex-EE三指灵巧手采用N+1型配置)。目前国内采用腱绳传动的灵巧手以灵心巧手的L30腱驱版为代表。这一趋势在特斯拉Optimus灵巧手的迭代中得到了充分验证:从早期“蜗轮蜗杆+腱绳 ”混合传动(存在结构笨重、动态响应不足等问题),到第三代采用“行星齿轮箱+行星滚柱丝杠+腱绳 ”复合传动方案的协同设计,成功解决了传统方案在重量与灵活性之间的矛盾,使灵巧手在提升单手承载力的同时,仍能保持接近人类手指的灵活运动能力。这一演进过程充分展现了腱绳传动在实现远距离柔性动力传输方面的不可替代性,是构建高性能灵巧手的理想选择。

UHMWPE腱绳潜在市场规模:百万人形机器人或对应9.6-72亿元市场空间。 目前机器人腱绳材料主要采用钢丝绳或超高分子量聚乙烯纤维(UHMWPE)。其中,UHMWPE具有超高强度(13倍于钢)、极低密度、化学稳定性和卓越耐磨性,可显著提升机器人的动态响应与耐久性,是机器人腱绳的最优材料。 目前,灵巧手厂商在材料选择上正呈现明显趋势,超高分子量聚乙烯纤维(UHMWPE)腱绳因其优异性能,逐渐成为高精度机器人的关键组件。
假设国内市场上用于机器人灵巧手的单根腱绳价格为40~60元,不同自由度N+1型腱绳传动结构灵巧手(双手)对应单台机器人腱绳价值量为960~3720元;若出货量达100万台则对应腱绳市场规模可达9.6~37.2亿元。
同理,假设国内市场上用于机器人灵巧手的单根腱绳价格为40~60元,不同自由度2N型腱绳传动结构灵巧手(双手)对应单台机器人腱绳价值量为1760~7200元;假设出货量为100万台则对应腱绳市场规模可达17.6~72亿元。


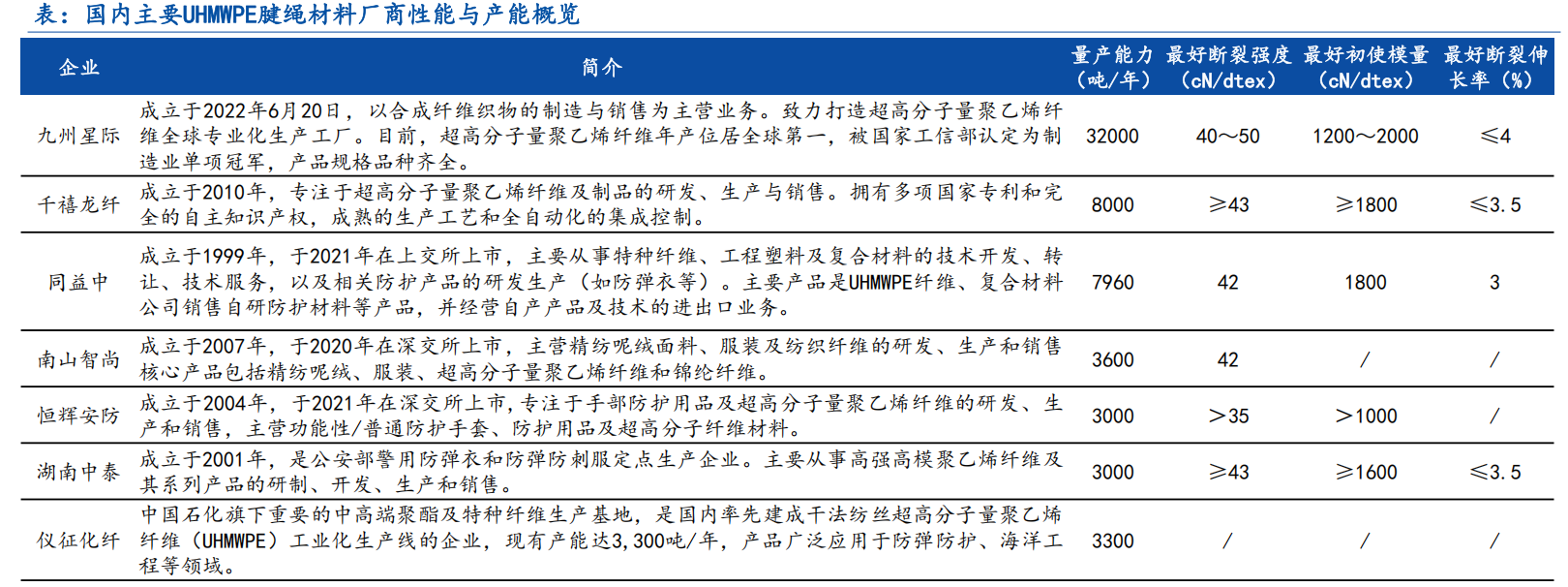
中国作为全球腱绳生产大国,截至2024年产业规模占据全球六成以上,具备较强的制造与供给能力。随着人形机器人进入规模化发展阶段,对腱绳在强度、耐磨性、疲劳寿命和控制稳定性等方面的要求不断提升,特别是灵巧手等高精度部件对材料模量与断裂伸长率等性能指标提出更严苛标准。 国产UHMWPE腱绳在断裂强度与初始模量方面部分已具备国际先进水平(海外UHMWPE领域龙头企业Dyneema最新推出的“SK99纤维 ”断裂强度为42.5cN/dtex,初始模量为1590cN/dtex),并正加速向高模量、低延展方向发展。未来国产产品将在保障供给安全的同时,实现从“产量领先 ”向“性能提升 ”的转型,进一步夯实在全球产业链中的竞争优势。
超高分子量聚乙烯纤维具备超高强度、超高模量、耐磨损、低密度、耐疲劳等性能,能够满足人形灵巧手传动的要求,南山智尚、恒辉安防、同益中等公司具备UHMWPE对应产能,可应用于人形机器人灵巧手腱绳,部分企业已经开始送样,有望伴随人形机器人浪潮核心受益。

2.2 传感器赋予多维感知能力,触觉、力觉传感器为高价值量方向
目前传感器方面的整体趋势是向多维度、高精度、高集成度、高延展性方向发展,高维力矩传感器和触觉传感器是传感器方面的当前研究重点。传感器是灵巧手的“皮肤 ”和“神经系统 ”,它不仅赋予机器人感知外部环境的能力,还为其精细操作提供了关键信息支撑。灵巧手的传感器主要分为位置传感器、视觉传感器、力/力矩传感器、触觉传感器。
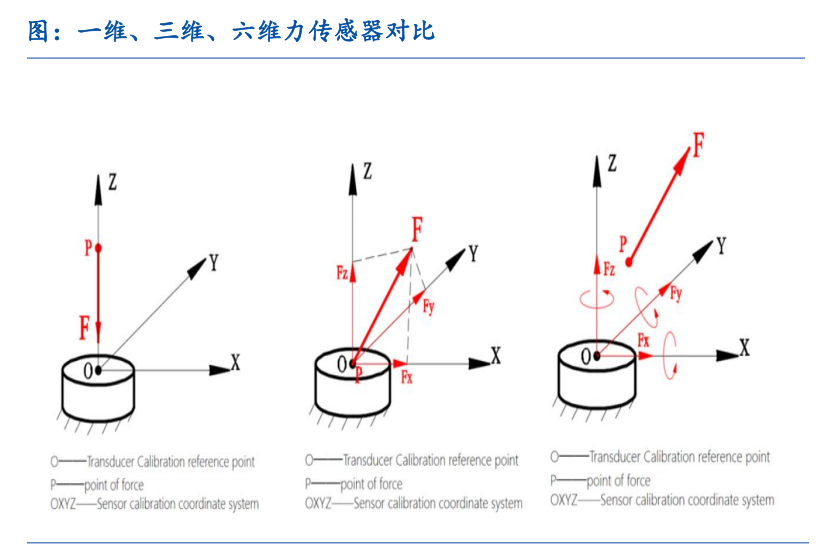
力/力矩传感器是一种能感知力、力矩并转换成可用输出信号的传感器,核心原理是将力作用下的形变转换成电信号,当有力/力矩作用时,力/力矩施加于传感器本体单元上,并引起本体单元的应变或形变,检测系统感知本体的应变或形变,通过电路将其转化为相应电压,通过测量电压值来表征力/力矩大小,并转换成可用输出信号,实现力/力矩的测量。人形机器人关节处使用单维力传感器,执行器末端主要使用六维力传感器, 目前国内厂商主要处于提高测量精度及降本阶段。
触觉传感器的核心是 “感知交互 ”,主要任务是为获取对象与环境信息和为完成某种作业任务而对机器人与对象、环境相互作用时的一系列物理特征量进行检测或感知。本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,其组成部分包括电极、敏感材料和导电材料等。当下触觉传感器两种主要的技术路线:MEMS、柔性触觉传感器(电子皮肤)。

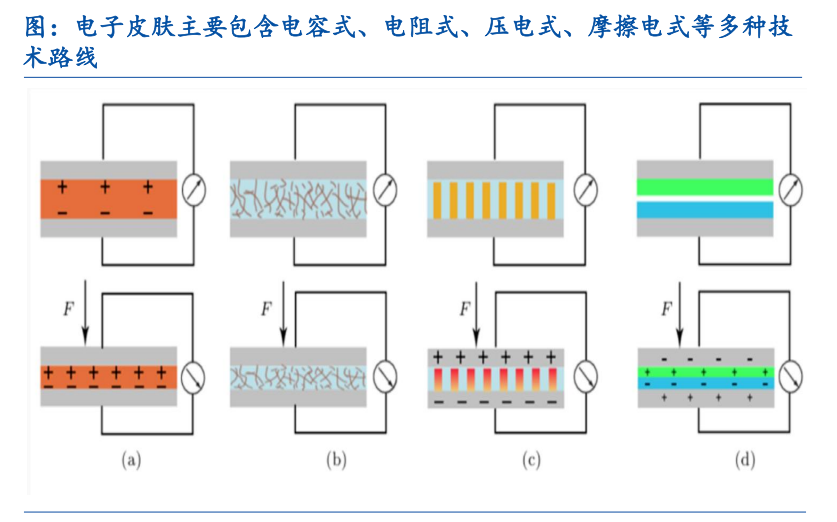
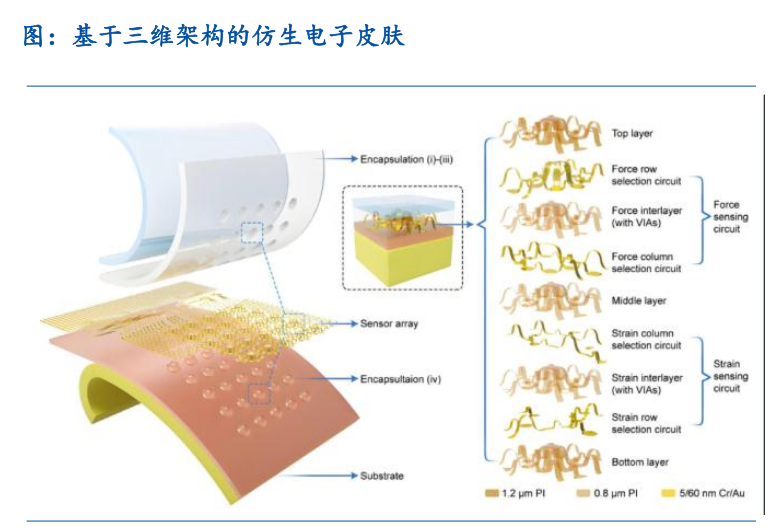
电子皮肤具备产业化价值,国内企业有望在全球竞争中占据重要地位。柔性触觉传感器又称为“ 电子皮肤 ”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。 其具备类似于人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征,具有研发和产业化价值, 目前正处于研发和小批量应用阶段。
技术层面来看,按照转换信号原理的不同,柔性触觉传感器可以分为压阻式(电阻式)、电容式、电感式、压电式、光电式等,其中电容式、压阻式柔性传感器应用较多。柔性压阻式传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择。劣势是体积大,不易实现微型化;功耗高,接触表面易碎;易受噪声影响。电子皮肤作为仿生智能界面,其研发面临材料、制造和算法三端协同挑战。产业链涵盖材料研发、传感器制造、系统集成、终端应用等多个环节,全球范围内已形成以欧美为主导、亚太快速追赶的竞争格局。 目前国内福莱新材、 日盈电子、汉威科技等企业凭借技术储备与市场潜力,有望在全球竞争中占据重要地位。

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
