
EtherCAT(以太网控制自动化技术),它确实支持串联(线型/ Daisy Chain 拓扑)连接机器人关节,是当前机器人多关节控制的主流连接方式,具体连接方案如下:
一、标准串联连接架构
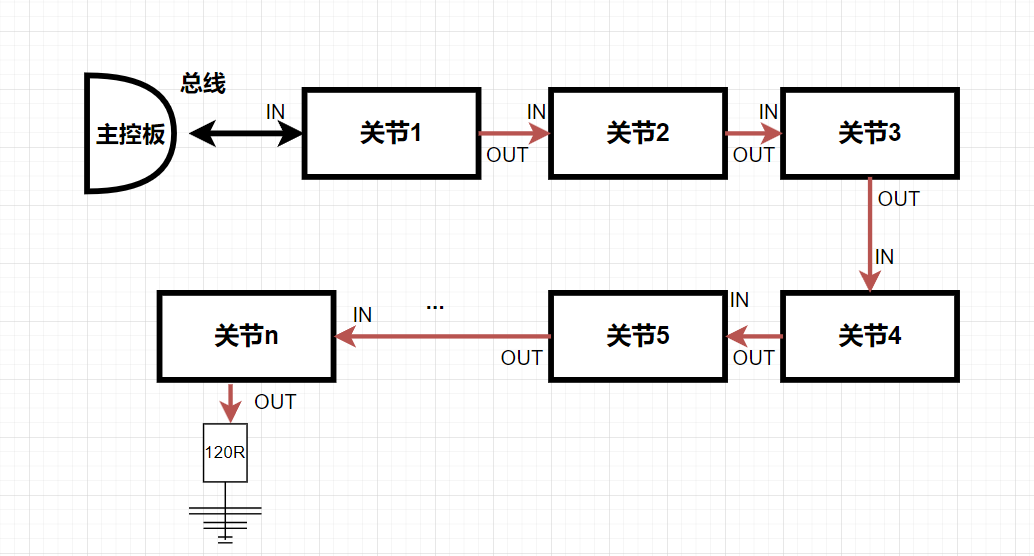
EtherCAT机器人关节采用主站→依次串联关节从站的线型拓扑,本质是菊花链串联结构,连接逻辑为:
[机器人主控制器(EtherCAT主站)] →
[关节1伺服驱动器(EtherCAT从站)IN → OUT] →
[关节2伺服驱动器(EtherCAT从站)IN → OUT] →
... →
[关节N伺服驱动器(最后一个关节)]
这种设计下,控制指令打包成完整数据包,像接力棒一样依次快速穿过每个关节模块:每个关节在数据包经过时读取自身指令,同时把关节状态写入数据包指定位置,最终数据包返回主控制器时,已经携带了所有关节的实时状态,通信延迟极低且和关节数量基本无关。
二、具体连接要点
-
端口连接规则:每个关节的EtherCAT伺服驱动器都自带IN/OUT两个网口,主控制器网线接第一个关节的IN口,第一个关节OUT口接第二个关节的IN口,以此类推依次串联即可。 -
终端电阻配置:在总线的最后一个关节,需要安装120Ω终端电阻匹配阻抗,减少信号反射干扰,户外四足机器人这类场景都需要遵循该规则。 -
-
可选冗余拓扑:如果需要更高可靠性,还可以把最后一个关节的OUT口接回主控制器形成环型拓扑,某一处断线仍可通过反向路径通信,提升系统容错能力。 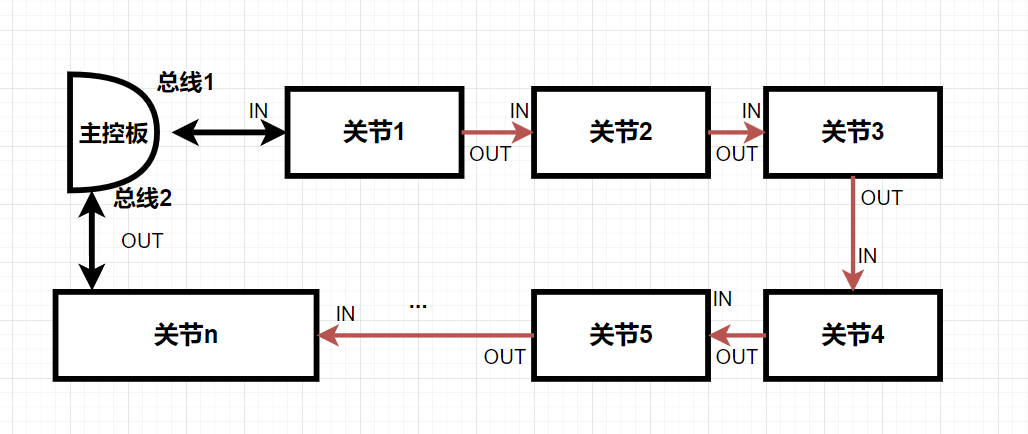
1.网络配置黄金法则:
2.单网段设备不超过32个
3.总电缆长度控制在100米内
4.使用CAT6以上屏蔽双绞线
三、实际工程连接步骤参考
-
硬件接线:按照上述串联规则完成网线连接,为每个关节驱动器供电,设置关节节点ID(通过拨码开关或软件配置)。 -
主站配置:在机器人控制器的EtherCAT主站软件中,扫描总线上所有关节从站,确认每个关节都被识别。 -
PDO映射配置:配置每个关节的输入输出过程数据(位置指令、实际位置、电流、状态等),建立主站和关节的实时通信映射。 -
通信测试:测试单关节指令下发和状态反馈,确认每个关节通信正常后,进行多关节同步测试。
目前EtherCAT的同步抖动可控制在1微秒以内,完全满足六轴机器人、人形机器人多关节同步运动的需求,已经成为工业机器人领域的主流通信方案。
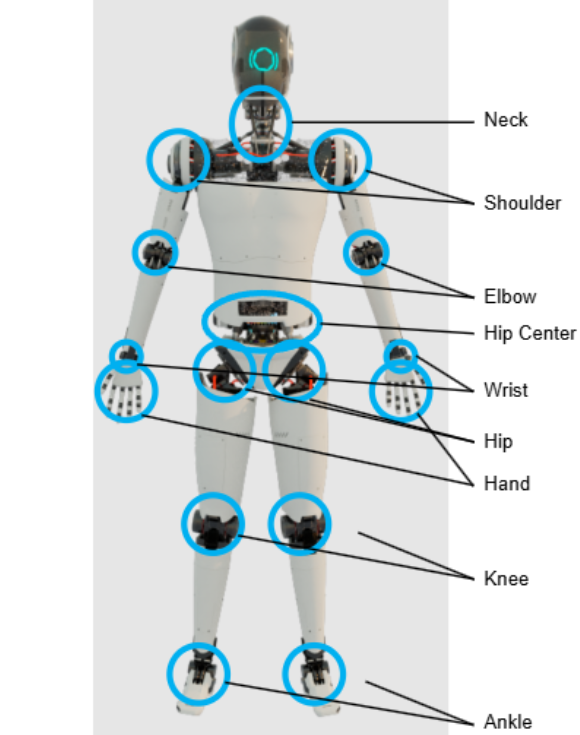
人形机器人一体化关节模组选型方案
一体化关节模组作为人形机器人的核心执行单元,占整机硬件成本50%-60%,直接决定了整机的负载能力、运动精度、能效水平与使用寿命。随着2026年人形机器人行业标准化进程加速及工信部配套标准体系的完善,行业选型逻辑已全面从实验室参数堆料转向场景适配导向。本文基于现行国家相关标准与全场景量产实测数据,拆解一体化关节模组的核心选型细则与落地准则。

01选型前置:场景优先与核心参数红线
选型第一准则是拒绝盲目追求峰值参数,以额定持续扭矩为核心选型基准,按应用场景精准匹配。2026年行业通用场景选型阈值已形成全行业共识,核心划分如下:
服务/康养人形场景要求上肢轻载关节额定扭矩10-50N·m,下肢主承载关节额定扭矩50-100N·m,需具备低冲击与高安全冗余;
工业人形场景核心负载关节额定扭矩需≥100N·m,全场景覆盖5-500N·m,强调高刚性与长寿命;
特种人形场景则需按需匹配超高动态或极端工况参数,优先验证环境适应性。
2026行业通用场景选型阈值
服务/康养人形场景
核心要求:低冲击、高安全冗余
- 上肢轻载关节额定扭矩:10-50N·m
- 下肢主承载关节额定扭矩:50-100N·m
- 扭矩密度:≥40N·m/kg
- 运行噪音:≤55dB
工业人形场景
核心要求:高刚性、长寿命
- 核心负载关节额定扭矩:≥100N·m
- 全场景扭矩覆盖:5-500N·m
- 扭矩密度:≥50N·m/kg
- 抗冲击过载能力:≥5倍额定扭矩
特种人形场景
核心要求:环境适应性与防护等级
- 按需匹配超高动态参数
- 适应极端工况环境
- 优先验证防护等级
在参数选型中需严格遵守红线:峰值扭矩仅作瞬时过载参考,严禁以峰值扭矩替代额定扭矩作为选型核心基准。在额定工况、额定转速及25℃标准环境下,谐波减速器方案3倍峰值扭矩持续时长不得超过100ms,RV减速器方案5倍峰值扭矩持续时长不得超过200ms,否则易造成整机过热或传动件疲劳失效。

02三大主流技术路线对比
2026年量产级技术路线已完成市场收敛,三大主流方案无绝对优劣,选型边界清晰明确,重点在于场景匹配度。
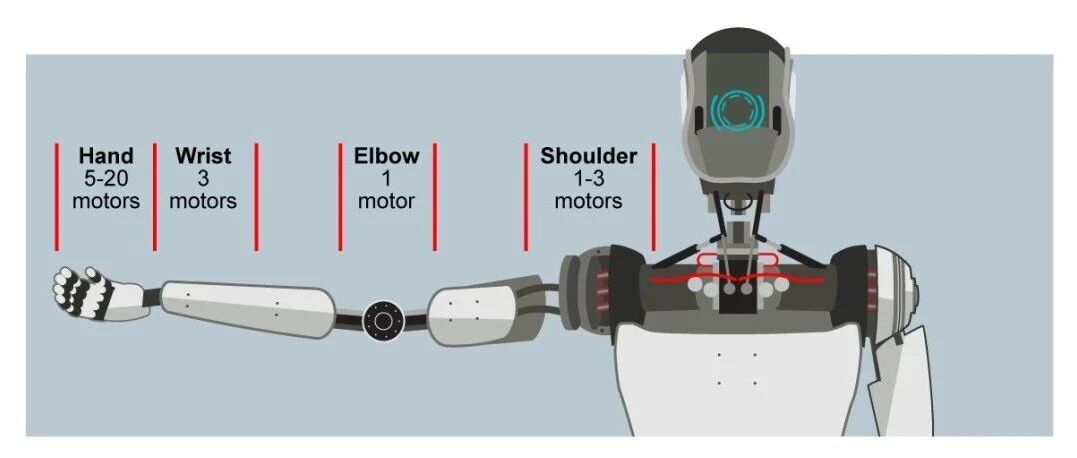
谐波减速器+永磁同步力矩电机路线作为轻载精密场景标配方案,量产级传动误差≤0.5弧分,适配上肢腕部、肘部等高精度操作场景;
RV摆线针轮减速器传动路线则是重载抗冲击场景核心方案,综合传动效率稳定在80%-85%,适配髋、膝、腰部等高负载场景;
准直驱(QDD)路线作为高柔顺力控方案,力控响应时延≤2ms,适配人机交互频繁的腕、踝关节。
|
|
|
|
|
|
|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
三大主流技术路线特性对比
03硬参数选型红线与量产适配
- 精度指标
额定负载工况下,定位精度≤0.1°,重复定位精度≤0.05°,扭矩控制精度≤±2%额定扭矩。 - 能效指标
谐波减速器方案综合传动效率≥75%,RV减速器方案≥80%,低于该数值将显著压缩整机续航。 - 可靠性指标
额定工况下L10寿命≥10000小时,高端方案≥18000小时;室内通用场景防护等级≥IP54,工业/户外/康养涉水场景≥IP65。 - 响应与通讯指标
伺服位置环阶跃响应时间≤10ms、位置环带宽≥100Hz;支持EtherCAT、CANopen等主流工业总线,EtherCAT分布式时钟同步误差≤1μs。
2026年人形机器人已进入规模化落地前夜,选型需重点关注量产落地适配性。优先选择“电机+减速器+驱动器+双编码器”四合一深度集成方案,最大限度减少外部接线。安全冗余层面,必须具备过流、过压、过热、过载、位置超限五大基础保护功能,协作场景需配备力矩碰撞检测,响应时间≤5ms,符合GB 11291.11-2022国家标准。供应链方面,国产一体化关节模组已实现全产业链自主可控,核心性能对标国际头部,交付周期大幅缩短,运维成本显著降低。
综上所述,2026年人形机器人一体化关节模组的选型核心逻辑是“场景定方向、额定扭矩定核心、标准定红线、量产适配定落地”。行业选型需拒绝无意义的实验室参数内卷,优先选择经过规模化场景验证的成熟量产方案,兼顾性能、成本、可靠性与全生命周期运维能力。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
