
成都人形机器人创新中心在人形机器人“大脑”领域实现重大突破,发布中国首个基于流形拓扑保持的机器人世界模型Manifold Topology-Preserving Based Robot World Model(MTPR-WM),旨在为机器人构建一个能深刻理解物理世界连接、空间与规则的高效“大脑”,使其摆脱传统AI模型的“像素化”感知局限,首次获得接近人类的“空间直觉”与物理推理能力,从而在复杂动态环境中实现快速、安全、可靠的决策与行动。
01 行业痛点:
为何传统AI模型让机器人“不那么靠谱”?
传统生成式架构的具身智能模型(如VLA)存在一定程度的“模型幻觉-Model Hallucination”(如大家常用的大语言模型每次回答的问题答案都是不确定的,这与和物理世界交互的机器人在任务执行过程中存在极大的不稳定性甚至安全问题),同时无法理解真实世界的物理规律,因此,其泛化能力不足。
使用这类模型处理机器人任务时,无法有效保障人、机器、环境的安全,这成为业界痛点。
02 破局之道:
从“生成”到“预测”的世界模型
与生成式模型产生的数据基础不同,世界模型通过动作作用在环境和物体上来“预测”其未来环境和物体的状态,而不是“生成”未来的状态,因此结果具有“确定性”,也就有了“泛化能力”。因此,世界模型是具备对物理世界理解和预测的全新架构,也是人形机器人技术收敛的最大可能方向。
成都人形机器人创新中心作为最早投入世界模型核心技术研发的团队,2025年8月首发中国首个基于世界模型的机器人任务执行系统(R-WMES)。
03 技术核心:
何为“流形拓扑保持”?
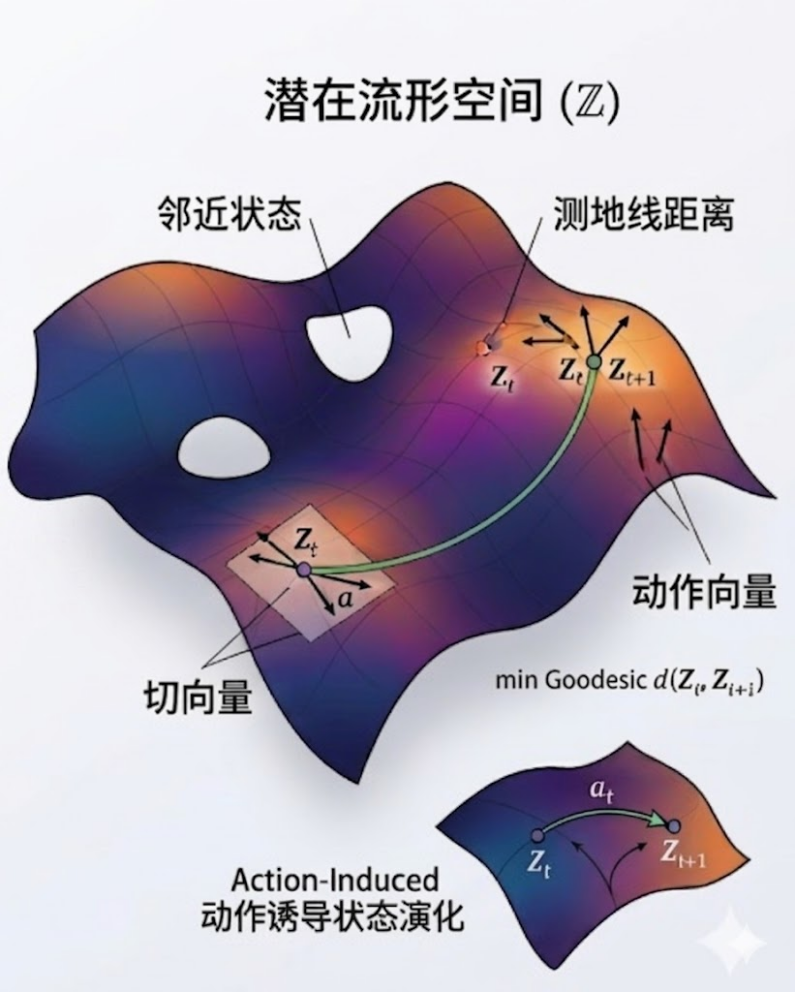
“流形-Manifold”概念是经典数学的重要分支,成都人形机器人创新中心在此基础上实现重大突破,发布中国首个基于流形拓扑保持的机器人世界模型Manifold Topology-Preserving Based Robot World Model(MTPR-WM)。通过流形实现对高维物理世界的状态描述映射到低维空间进行有效编码,实现机器人在隐空间(Latent Space)规划中符合自然界物理规律,不会出现 VLA 这类架构导致的物理碰撞、穿越、重叠等不符合自然规律的问题。
在具身智能的架构中,机器人面对的是一个高维且复杂的非线性物理世界。传统的感知模型往往将图像或点云数据映射为离散的特征向量,这导致了物理空间连续性的断裂。
1. 建立“空间直觉”:构建连续、有逻辑的思维地图
基于流形拓扑保持的世界模型,核心在于通过编码器 ,寻找隐藏在高维观测背后的低维流形
,寻找隐藏在高维观测背后的低维流形![]() 。这种映射本质上追求一种“同胚”效果,即确保物理世界中的每一个位姿、每一处几何连接,在隐空间(Latent Space)内都能找到对应的且保持邻接关系的拓扑点。这是机器人建立“空间直觉”的第一步,使其大脑中的数字地图不再是孤立的坐标集合,而是一张具备弹性的、逻辑连续的网格。
。这种映射本质上追求一种“同胚”效果,即确保物理世界中的每一个位姿、每一处几何连接,在隐空间(Latent Space)内都能找到对应的且保持邻接关系的拓扑点。这是机器人建立“空间直觉”的第一步,使其大脑中的数字地图不再是孤立的坐标集合,而是一张具备弹性的、逻辑连续的网格。
2. 理解真实“距离”:内化物理规则,杜绝“穿越”
为了让编码空间真正具备指导行动的意义,模型必须在流形内引入严格的度量学习机制。在物理世界中,两点之间的“远近”不仅仅是欧氏距离,更包含绕过障碍物的测地线距离。拓扑保持的世界模型通过对比学习技术,强制要求隐空间(Latent Space)内的表征位移与物理执行相关。这种度量一致性确保了机器人能直观地感知到:在流形上相距较近的两个编码状态,在现实中仅需微小的动作即可触达;反之,若中间隔有障碍物,即便视觉上靠近,其在流形上的路径也会因拓扑阻隔而变得极其遥远。
3. 感知“物体占据”:让障碍物在思维中成为实体
空间占据关系(Occupancy)是世界模型物理性的基石。在该框架下,场景不再被看作静态的贴图,而是通过隐式神经表示(INR)参数化为流形上的连续场。每一个被物体占据的物理区域,在流形编码中都对应着特定势能屏障。这种设计使得空间占据变得“可微”,机器人不仅能识别出障碍物的存在,还能感知到物体边界的平滑演变。当环境发生动态变化时,流形上的占据场会随之平滑形变,维持了场景图在逻辑层面的一致性,从根本上杜绝了生成式模型中常见的“物体闪烁”或“穿模”等物理幻觉。
4. 行动前的“思想实验”:在约束曲面上预演未来
该世界模型的精髓在于对未来的预演,而基于流形的表征将动作(Action)定义为流形上的切向量场或算子流(Flow)。当机器人计划执行一个指令时,模型会在流形上模拟状态的演化:![]() (
(![]() 为流形上的动力学矢量场)由于流形结构预先嵌入了物理约束和拓扑规则,预测出的演化轨迹会自然地避开高势能的占据区,并严格遵循关节限位等物理边界。这种在“约束曲面”上进行推理的方式,极大缩小了机器人的策略搜索空间,使其能够直接在潜空间内进行高保真、低偏差的“思想实验”,从而在执行前就排除掉物理上不可行的动作序列。
为流形上的动力学矢量场)由于流形结构预先嵌入了物理约束和拓扑规则,预测出的演化轨迹会自然地避开高势能的占据区,并严格遵循关节限位等物理边界。这种在“约束曲面”上进行推理的方式,极大缩小了机器人的策略搜索空间,使其能够直接在潜空间内进行高保真、低偏差的“思想实验”,从而在执行前就排除掉物理上不可行的动作序列。
04 应用价值:
打造通用人形机器人“大脑”
基于流形拓扑保持的世界模型,为通用人形机器人平台提供了一种跨形态、跨场景的底层表征范式。它将复杂的感知数据压缩为具备几何逻辑的精简表征,使得机器人无论是在黑暗狭窄的矿井执行巡检,还是在结构复杂的家庭环境中进行柔性协作,都能凭借这套拓扑一致的“心理地图”快速适应。这种模型不仅提升了强化学习的样本效率,更赋予了机器人物理意义上的泛化能力——即对空间结构本质的深刻理解。随着几何深度学习的进一步突破,这种流形大脑将成为具身智能体从“感知机器”进化为“物理智能体”的核心支撑。
成都人形机器人创新中心将持续引领具身智能世界模型的核心技术突破,并推动其在机器人本体矩阵中的应用,让机器人更聪明,更能理解物理世界,真正实现走进千家万户。
关于我们
Company Profile

四川省一号创新工程一号原点项目,四川省新型研发机构,成都市人工智能链主企业。主导人形机器人“大脑”领域国家标准制定,拥有国际顶尖研发成果30余项,发布全国首个基于扩散架构的人形机器人任务生成模型及高速推理模型、全国首个机器人多模态模型及双臂协作系统、全国首个基于3DSGs的人形机器人推理规划执行系统(Raydiculous-1)、全国首个“世界模型”机器人执行系统、全球首个具身智能工程机器人多模态大模型等“大脑”核心技术,以及全球首个超高精度AI神经网络电子皮肤、全球首个全尺寸重载双轮足机器人开源平台(RW-02OP)、超轻量级人形机器人“贡嘎一号”、文商旅体机器人“镋钯”“锦宝”等产品,与央企成立合资公司,创建“央地共建具身智能工程机器人创新中心”,服务国家战略,赋能大国工程,开拓具身智能工程机器人成果转化及产业化应用,走在全国前列。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
