

1随着人形机器人技术的飞速发展,触觉感知成为机器人实现精细操作的核心挑战。视触觉传感器(Vision-Based Tactile Sensor, VBTS)作为一种融合光学与触觉感知的前沿技术,因其高分辨率、多维信息捕获能力,以及抗干扰性强优点,被特斯拉等企业视为灵巧手的“最后一块拼图”。
本文将从原理、发展史及代表性企业三个维度,系统解析这一技术如何推动机器人迈向“心灵手巧”的新时代。
一,视触觉传感器原理
视触觉传感器是一种通过光学成像模拟人类触觉的传感技术。其核心原理是利用摄像头捕捉弹性材料与物体接触时的微观形变,并将形变光影转化为高分辨率触觉信息。
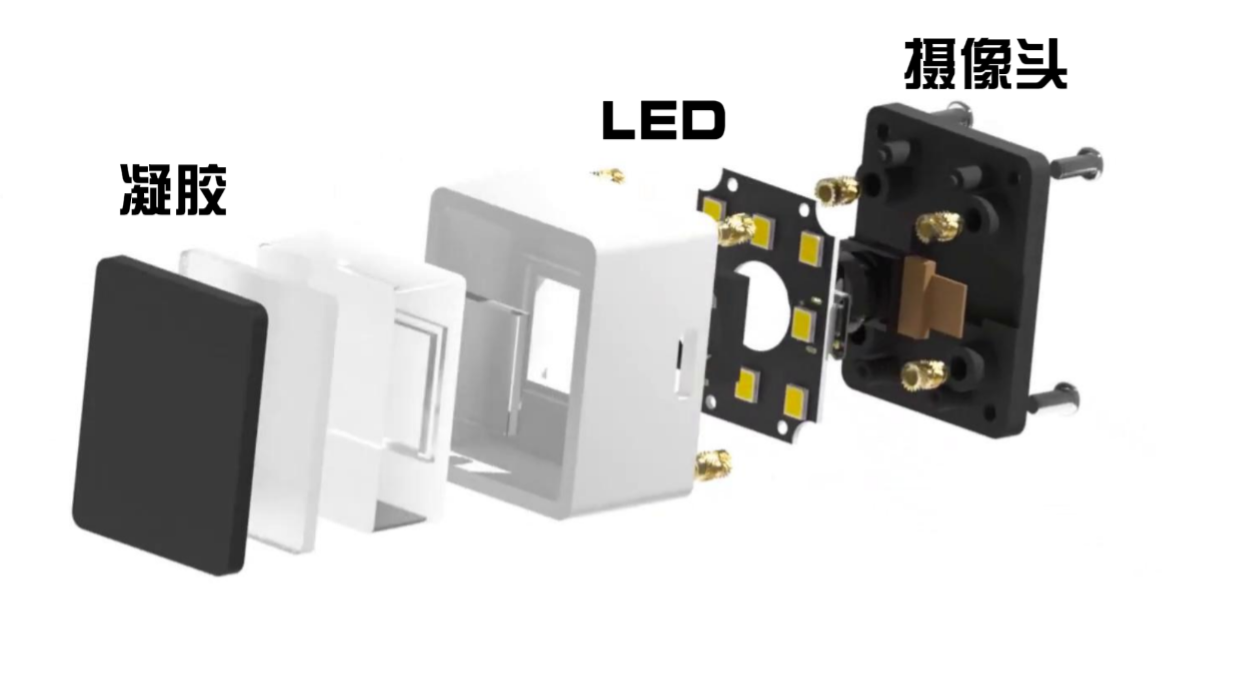
传感器硬件由接触模块、照明模块、图像采集模块和信息处理模块组成:
- 当涂有反光膜的柔性介质(如凝胶)接触物体时,其表面随外力发生形变;
- 内部光源照射下,形变区域呈现独特的光影变化;
- 微型摄像机实时拍摄这些图像,再通过算法解析为压力分布、纹理、滑动方向等触觉数据。
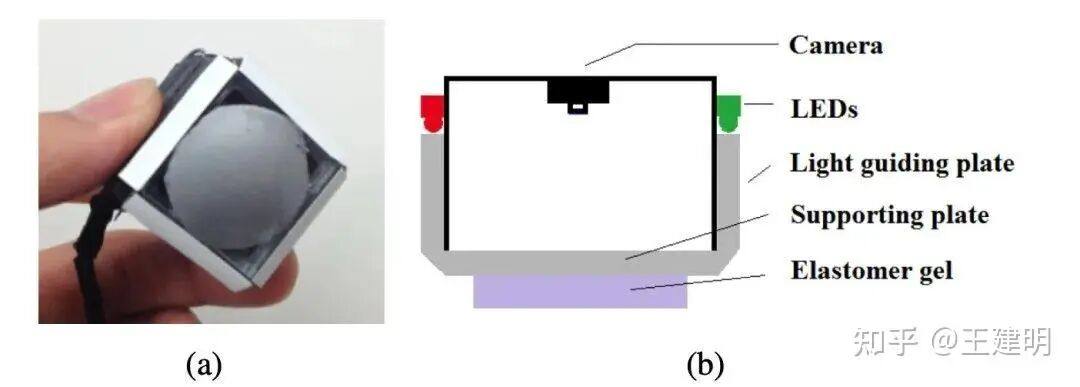
适合机器人指尖的GelSight视触觉传感器设计和结构
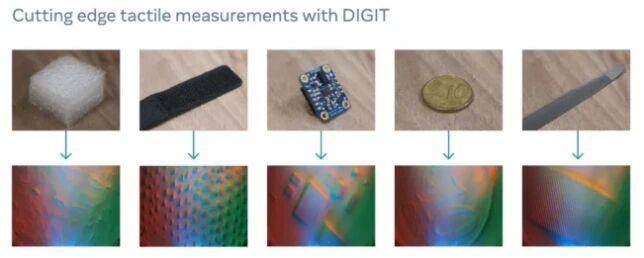
DIGIT视触觉传感器对不同物体的测试图像
与传统触觉传感器(如压阻式、电容式)仅能感知法向力不同,视触觉传感器可同步获取法向力、剪切力、物体位姿、纹理及软硬度等多维信息,分辨率可达微米级。
例如,搭配视触觉传感器的灵巧手能稳定抓取鸡蛋类易碎物,并通过实时反馈调整抓取策略,接近人类手指的灵敏度和适应性。
技术优势:
- 高维感知适配AI大模型:输出为图像格式,与机器人视觉数据天然兼容,可直接接入视觉-语言-动作(VLA)大模型,实现端到端学习。
- 低成本与易集成:以GelSight为例,单价仅350美元,远低于六维力传感器,且支持5分钟内快速安装和二次开发。
- 强抗干扰能力:光学信号不受温度、磁场影响,适用于冶金、焊接等复杂环境。
局限性:体积较大(需集成相机与光源)、柔性材料易磨损、算力要求高,仍是当前优化方向。
二,视触觉传感器发展史
视触觉传感器的技术根源可追溯至2004年东京大学提出的GelForce方案,但真正突破始于2009年MIT爱德华·阿德尔森(Edward Adelson)团队开发的GelSight。该团队首次实现超高分辨率触觉成像,最初用于材料表面检测,2013年后逐步转向机器人领域。
2014年,MIT推出首款指尖GelSight传感器,使机器人能完成USB插拔等精细操作,标志着视触觉技术正式融入机器人应用。
2017-2023年成为技术快速迭代期:
- 2017年:GelSight通过标记点算法实现剪切力与滑动感知,并开源DIGIT传感器方案,推动科研普及。
- 2020年:MIT的SwingBot项目凭借触觉动态操控获IROS最佳论文,验证了触觉在复杂任务中的价值。
- 2023年:GelSight Svelte推出曲线形单摄像头设计,实现全手指覆盖感知,进一步小型化。
同期,UC伯克利的OmniTact、清华的9DTact等衍生方案涌现,逐步形成“光学主导、多模态融合”的技术路线。2022年,GelSight公司与Meta合作推出DIGIT商业化产品,单价降至300美元,加速了产业落地。
发展主线从实验室高精度工具,走向低成本、易集成的机器人核心部件,背后是深度学习与光学硬件的协同进步。
三,视触觉传感器代表性企业
当前市场呈现“海外引领、国内追赶”格局,国内初创企业依托供应链与场景优势快速崛起。
1、GelSight
GelSight 成立于 2009 年,由 MIT 计算机科学与人工智能实验室(CSAIL)的 Edward Adelson 教授团队创立,总部位于美国马萨诸塞州。作为视触觉传感技术的奠基者,其核心产品通过弹性体材料与计算机视觉算法结合,实现对物体表面微观结构的高精度测量。

官网:https://www.gelsight.com/
GelSigh推出了多款产品,包括用于科研和工业检测的GelSight Mini(售价约499美元),以及与Meta合作开发的低成本、易集成的DIGIT机器人触觉传感器(售价约300-350美元),后者已开源相关设计。

DIGIT机器人触觉传感器
2、纬钛机器人
纬钛机器人成立于 2024 年 1 月,由 GelSight 技术的关键推进者李瑞博士创立,团队核心成员来自 MIT 和清华大学。公司继承并发展了 GelSight 的技术路线,推出面向工业场景的触觉传感器产品 GelFinger。

官网:https://vit.ai/
其技术优势在于:
- 超高分辨率感知:通过微型摄像头捕捉凝胶形变,单个指尖可部署数万至数十万触觉感应点,分辨率较传统传感器提升数千至数万倍;
- 多维力测量:同步检测法向力、切向力、滑动和扭转负荷,适应柔性物体抓取、精密装配等场景;
- 手眼协同算法:结合视觉与触觉数据,实现机器人对复杂任务的闭环控制,如无序抓取、USB 插拔、材质识别(准确率达 99.79%)。
2025 年,纬钛完成近亿元天使轮及天使+轮融资,由小米战投领投,资金将用于技术研发与海外市场拓展。目前,其产品已在精密制造、科研等领域实现小批量出货,并与多家机构达成合作。

GF225视触觉传感器
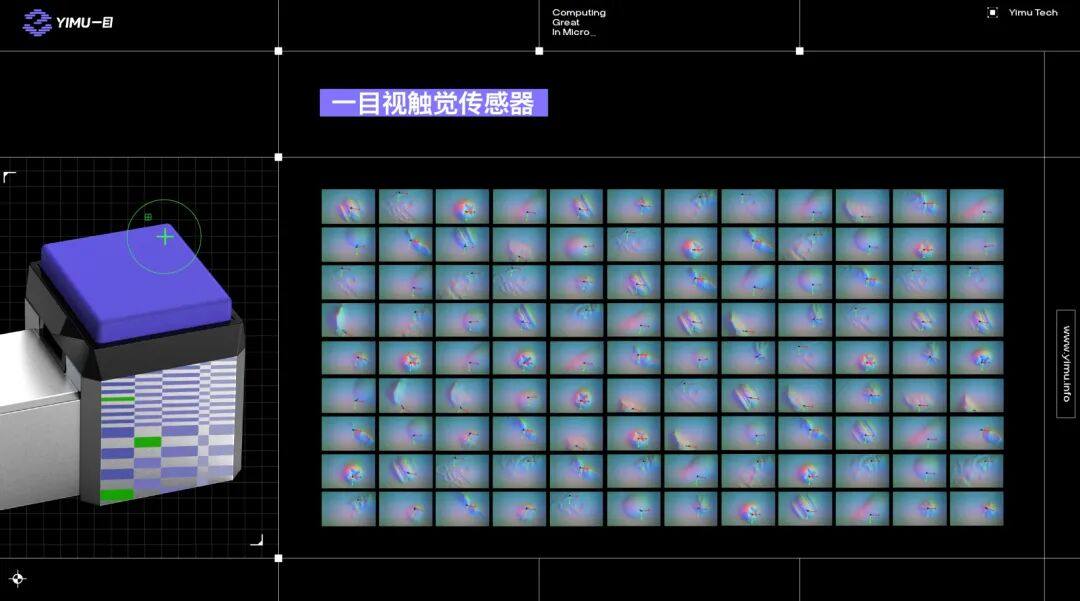
3、一目科技
深圳一目科技有限公司依托仿生传感硬件+感知行动闭环架构,打造出全球首个专为精细操作设计的全栈触觉系统。

官网:https://www.yimu.info/
该系统借助一目科技自研的仿生传感器,突破传统触觉仅测压力的局限,通过多模态力觉解耦复现人类指尖力学感知维度;通过构建神经网络世界模型,将高保真触觉信号转化为机器可理解的物理语言,实现对脆弱物体、柔性物体的精准抓取;再通过自适应学习框架,赋予机器人实时理解物体形态、位姿并操作的能力。

4、戴盟机器人
戴盟机器人成立于 2021 年,依托香港科技大学研发团队,首创基于单色光图案追踪的视触觉传感器技术。与 GelSight 的三色光方案相比,其技术通过算法优化降低算力需求,解决了发热大、成本高的问题,并将传感器厚度压缩至毫米级。

官网:https://www.dmrobot.com/
2025 年,公司发布全球首款多维高频率视触觉传感器及五指灵巧手,传感器寿命从初期数千次提升至 200 万次以上,感知单元密度达每平方厘米 4 万个(超越人手末梢神经的 2500 个单元)。目前产品已应用于人形机器人与工业自动化场景,目标是通过低成本、高可靠性方案加速具身智能产业化。

5、千觉机器人
千觉机器人(Xense Robotics)【全称:千觉机器人科技(上海)有限公司】成立于2024年5月,是一家专注于研发面向机器人精细操作的多模态触觉感知与控制技术,赋能新一代智能机器人的创新型科技企业。
千觉机器人为智元机器人提供高分辨率多模态触觉传感器G1-WS解决方案,该传感器已应用于智元机器人的数据采集工作。此外,千觉机器人正与宁德时代合作,在实验室开展使用机械手装配电池的概念验证研究。
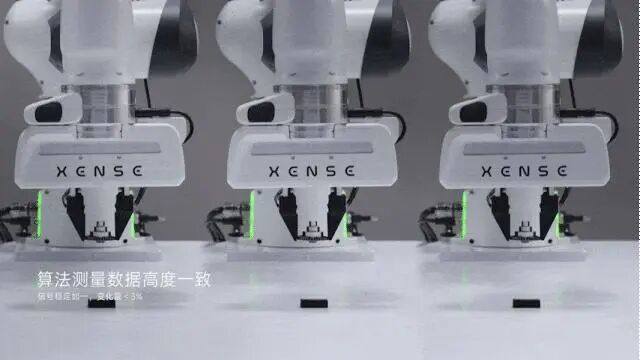
多模态视触觉传感器的一致性测试
6、叠动科技
叠动科技成立于2022年,核心团队源自香港科技大学、清华大学等高校。该公司是全球首创将MEMS工艺与视触觉传感技术融合的方案提供商。
叠动科技的核心技术是研发毫米级高性能视触觉传感器,以解决传统传感器体积大的痛点,其产品曾获日内瓦发明奖金奖。该公司与上市公司隆盛科技形成战略合作(隆盛科技战略投资其5%股权),通过“硬件+感知”协同,赋能工业机器人末端执行器。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
