
◆宇树科技Dex3-1灵巧手概况◆
宇树科技Dex3-1灵巧手概况宇树科技的Dex3-1灵巧手是一款高度集成、智能化的机器人末端执行器,专为提升人形机器人的操作灵活性和环境适应性而设计。
其原理与组成融合了先进的机械设计、传感器技术和控制算法,其外观如下所示:
宇树G1运动系统(图片来源:宇树科技官网)
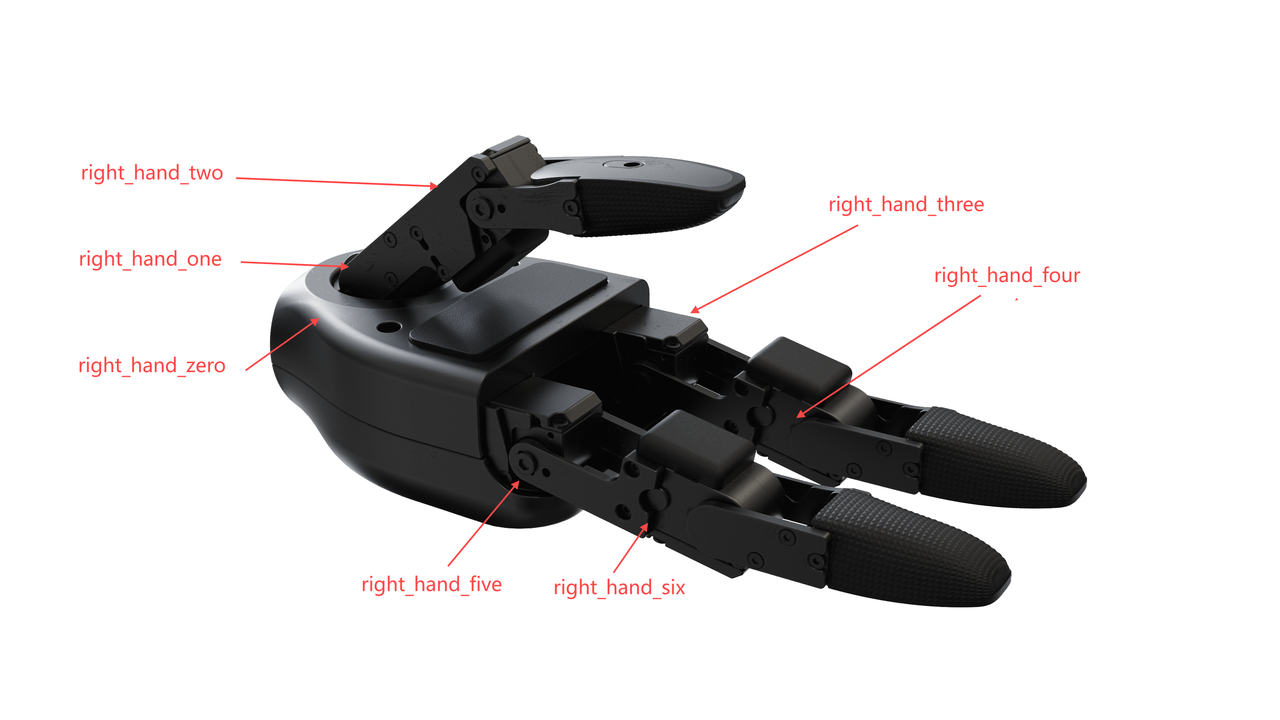
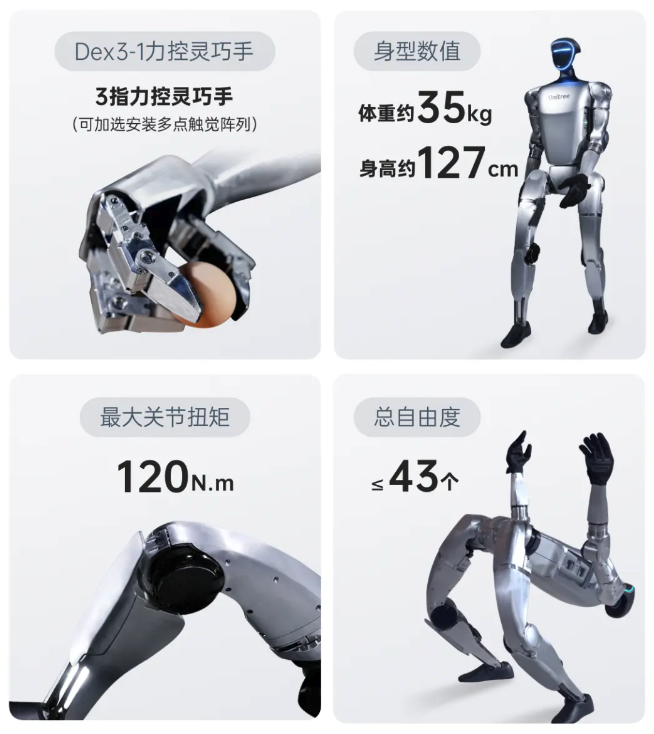
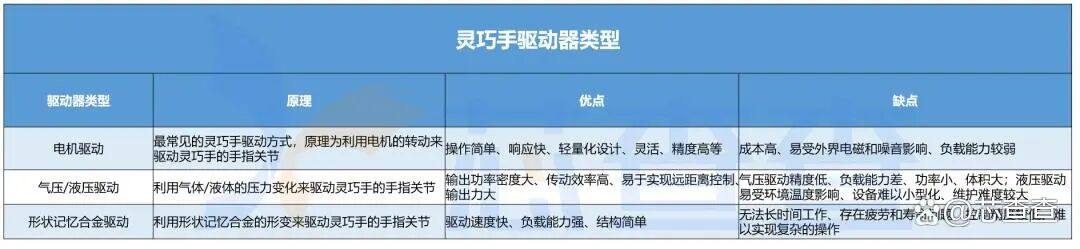
宇树自研 Dex3-1 力控灵巧手,这款灵巧手采用三指设计,每根手指具有 2 个弯曲自由度,拇指额外配备 1 个旋转自由度,总计 7 个自由度。在国内外的人形机器人里,采用三指设计方案的厂商屈指可数。据实践证明,三指方案已能满足 90% 以上的抓取需求,这也是波士顿动力 Atlas 等产品采用的方案。从实用性角度考虑,他们倾向于简化硬件设计。
宇树G1运动系统(图片来源:宇树科技官网)
◆宇树科技Dex3-1灵巧手技术解析◆
下文从机械设计、传感器集成、控制系统、动力系统四个方面进行详细解析:
一、机械设计原理
Dex3-1灵巧手的机械设计高度参考了人手的解剖结构,以实现拟人化的功能。

宇树Dex3-1灵巧手(图片来源:宇树科技官网)
自由度分布
-
拇指:拥有3个自由度,分别位于拇指的指尖关节、掌指关节(MCP)和腕掌关节(CMC),使拇指能够灵活地进行对掌、屈伸和侧摆等动作。
-
食指和中指:各拥有2个自由度,主要分布在掌指关节(MCP)和近端指间关节(PIP),使手指能够完成弯曲、伸展等动作。
-
总计:Dex3-1灵巧手拥有7个自由度,确保了手部动作的灵活性和多样性,能够模拟人手的多种精细动作。
关节类型
-
微型无刷力控关节:采用6个直驱关节和1个齿轮传动关节。直驱关节提供直接、精准的控制,响应速度快;齿轮传动关节则通过齿轮啮合传递力量,增强了力量传递效率,适合需要较大力矩的关节。
-
结构材料:使用轻巧而坚固的材料,如铝合金和碳纤维复合材料,以确保灵巧手的强度和耐用性,同时减轻整体重量,提高运动灵活性。
宇树Unitree G1机器人(图片来源:宇树科技官网)
二、传感器组成
Dex3-1灵巧手集成了丰富的传感器,以实现对操作环境和自身状态的精准感知。

宇树Unitree G1机器人灵巧手(图片来源:宇树科技官网)
触觉传感器
-
数量与分布:配备33个触觉传感器,分布在掌心、指腹和指尖。其中,掌心分布2x2阵列的传感器,指腹分布2x2阵列的传感器,指尖分布3x1阵列的传感器。
-
功能:能够实时感知接触力、物体表面纹理等信息,为精准操作提供反馈。传感器感知范围为10g-2500g,最大可接受力为20kg。
其他传感器:
-
力传感器:集成在关节处,用于测量手指施加在物体上的力的大小和方向,实现精确的力控制。
-
位置传感器:用于测量关节的角度和位置,为运动控制提供准确的信息。
-
温度传感器:监测灵巧手的工作温度,确保其在安全、稳定的范围内运行。
控制系统
-
Dex3-1灵巧手的控制系统采用先进的控制算法和通信接口,以实现精准、灵活的操作。
控制策略
-
力位混合控制,能够根据不同的任务需求,灵活调整力和位置的控制策略。在需要精准位置控制的场景下,采用位置控制模式;在需要稳定抓取力的场景下,采用力控制模式。
通信接口
-
高速485通信:支持高速数据传输,确保与机器人其他部分的数据传输效率和稳定性,其通讯基座为基于以太网的DDS协议。
三、动力系统
Dex3-1灵巧手在材料和技术上采用了多项创新,以提升其性能和可靠性。
驱动技术
-
微型无刷电机:具有高效、紧凑、响应快的特点,适合在灵巧手中应用。电机采用无铁芯设计,能量转换效率高,直径小,可密集排布于手掌空间。
-
传动系统:腱绳传动与齿轮传动结合:腱绳传动具有柔性排布优势,可实现轻量化与高灵活度;齿轮传动则通过齿轮啮合传递力量,增强了力量传递效率。

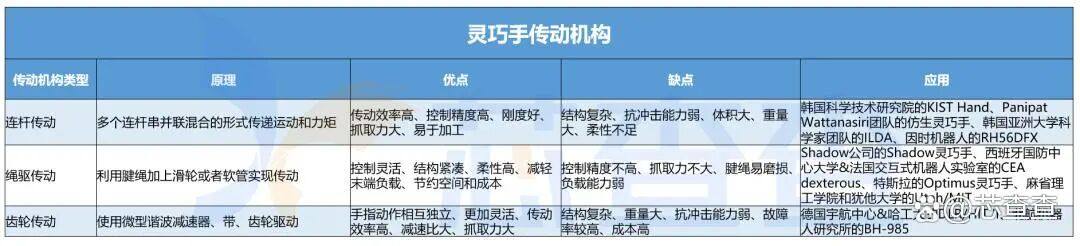
灵巧手传动形式(图片来源:浙商证券)
编码器与反馈系统:
-
转子绝对值编码器:用于测量关节的角度和位置,提供精准的反馈信号。
-
电机感知反馈:包括力矩、角度、角速度、温度等参数,为控制系统提供全面的状态信息。
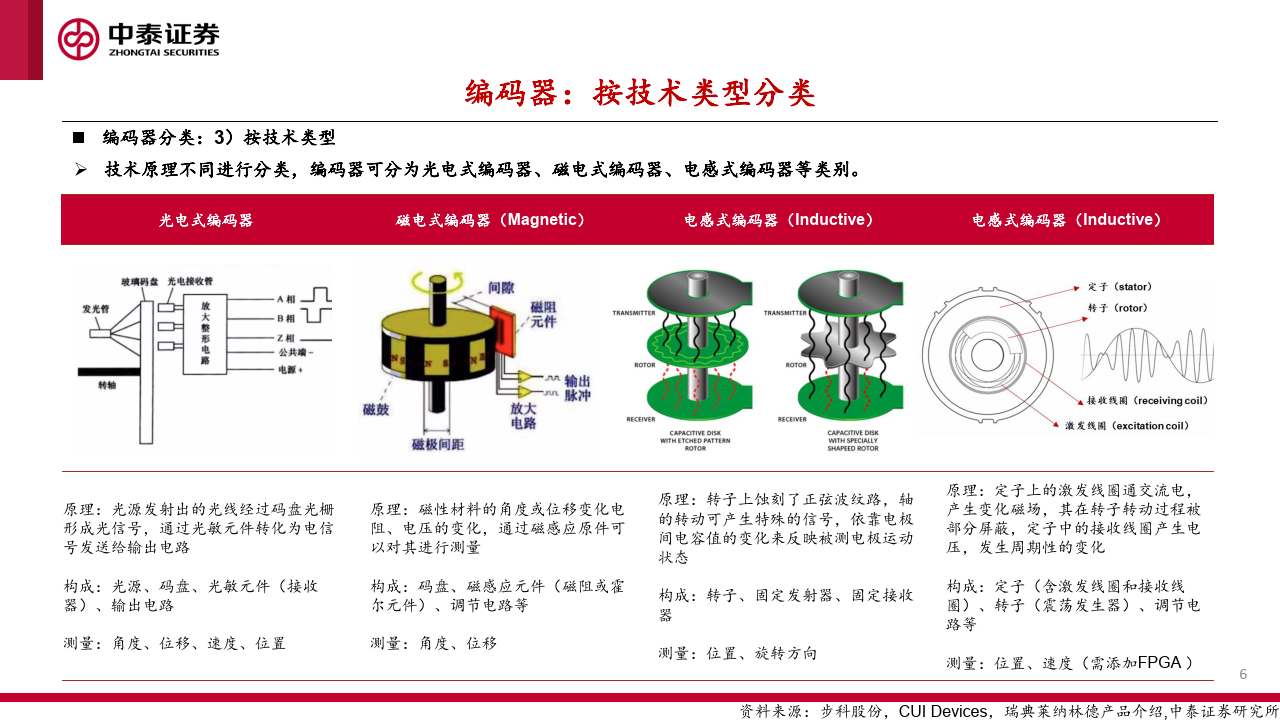
编码器类型(图片来源:中泰证券)
四、灵巧手的感知系统:传感器
目前Dex3-1其强大的传感器系统包含33个传感器,包含触觉,力矩,位置角度,接近觉,温度,六大类。
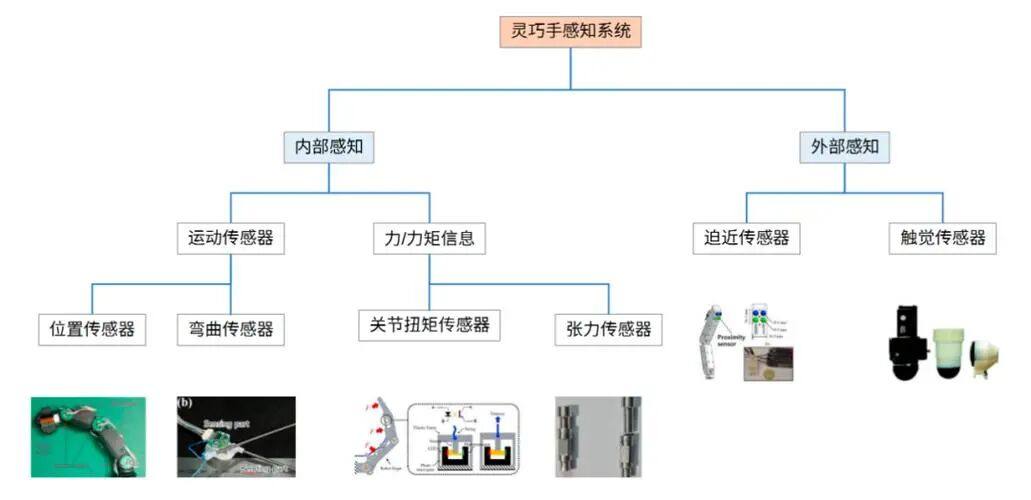
人形机器人灵巧手相关传感器(图片来源:网络资料)
这六大类组成灵巧手的神经网络,将相关信息传递给大脑,后续经过处理,反馈给电机进行动作的执行及操作,小编梳理这几类传感器的原理总结如下,可以参考扫盲!
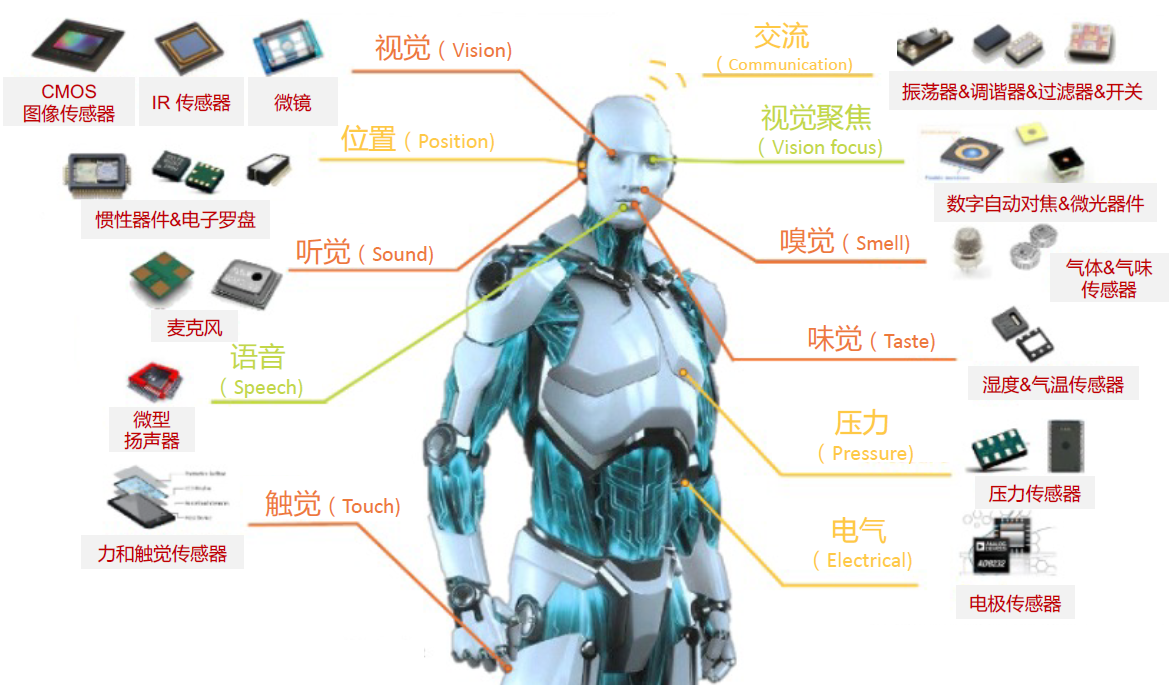
人形机器人灵巧手相关传感器(图片来源:浙商证券)
触觉传感器
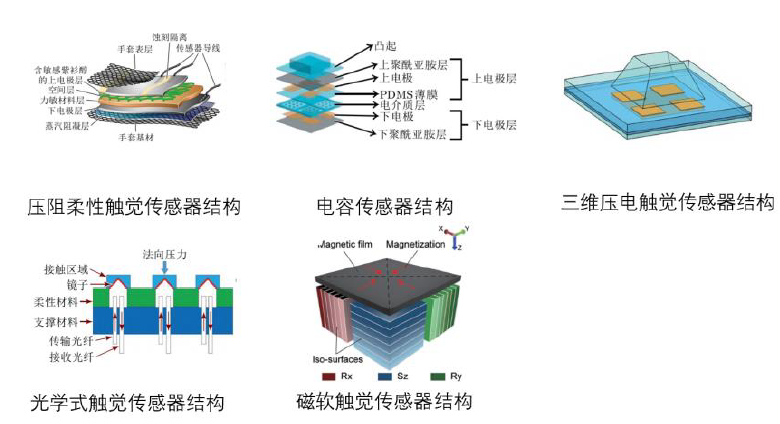
触觉传感器分类(图片来源:西部证券)
-
压阻式:通过材料电阻变化检测压力(如硅压阻传感器),适用于大测量范围场景。
-
电容式:利用电容间隙或面积变化感知接触力,具有高空间分辨率和低功耗优势。
-
压电式:材料受力产生电荷(如压电陶瓷),响应快但分辨率较低。
-
光学式:通过光反射或折射检测形变(如腾讯TRX-Hand的柔性阵列),支持多模态感知(温度、纹理)。
-
柔性传感器:模拟人类皮肤,采用PDMS等柔性材料,可检测压力、温度及拉伸形变。
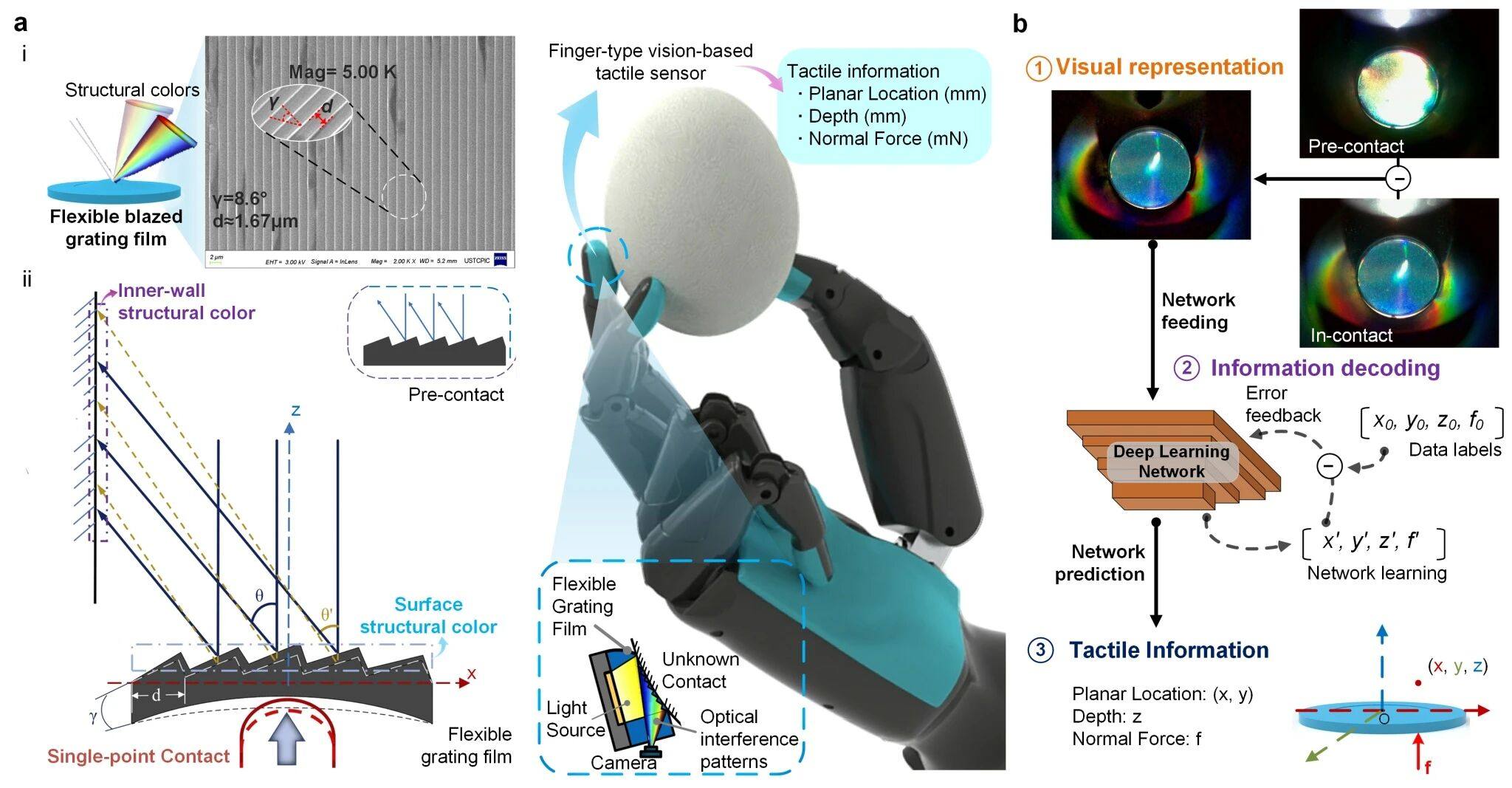
基于柔性光栅结构色的触觉感知方法示意图(图片来源:中国科大)
六维力/力矩传感
-
原理:测量三个正交方向的力和力矩,采用应变片或光学原理(如ATI的FC-Delta系列)。
-
应用场景:分布于手腕和指端,用于动态抓取力反馈(如特斯拉Optimus关节传感器)。
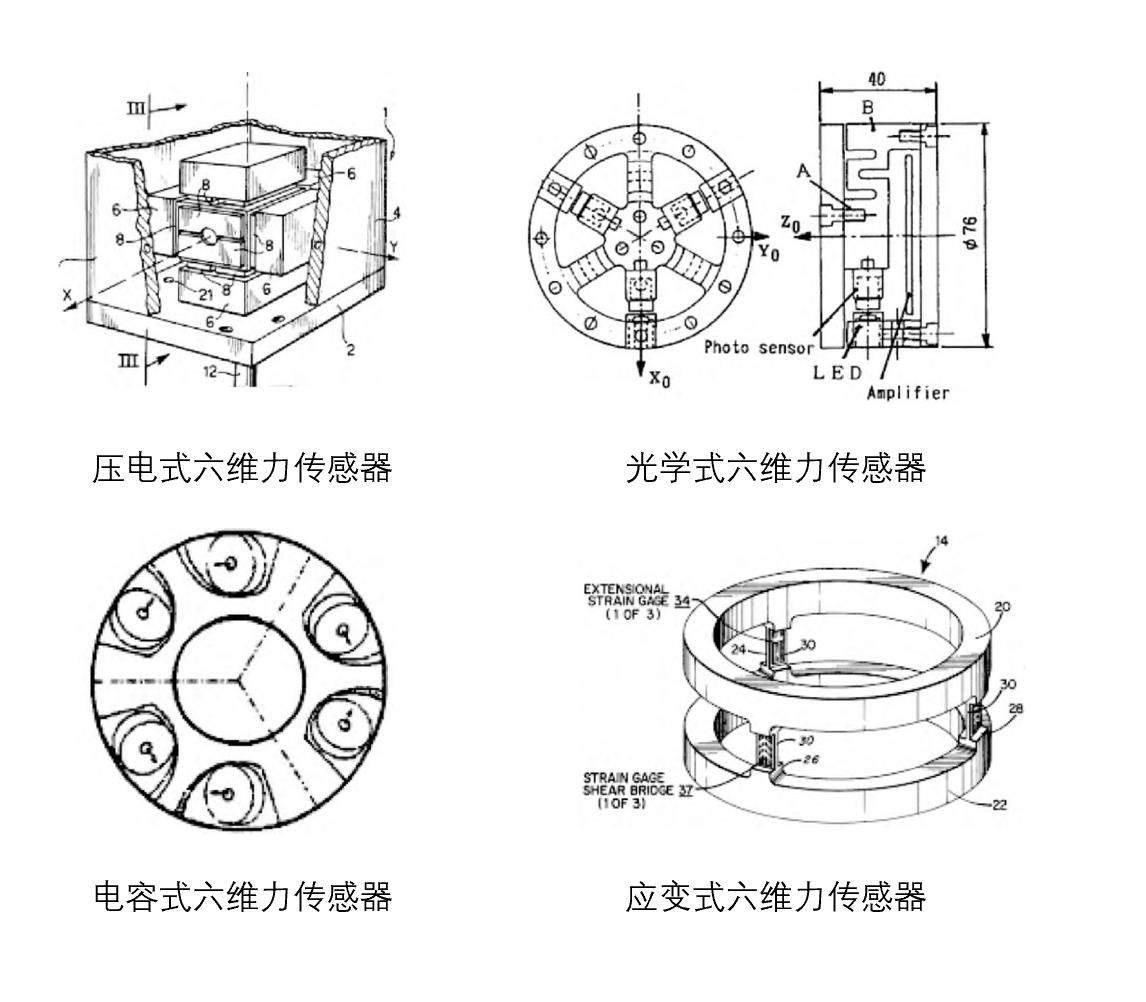
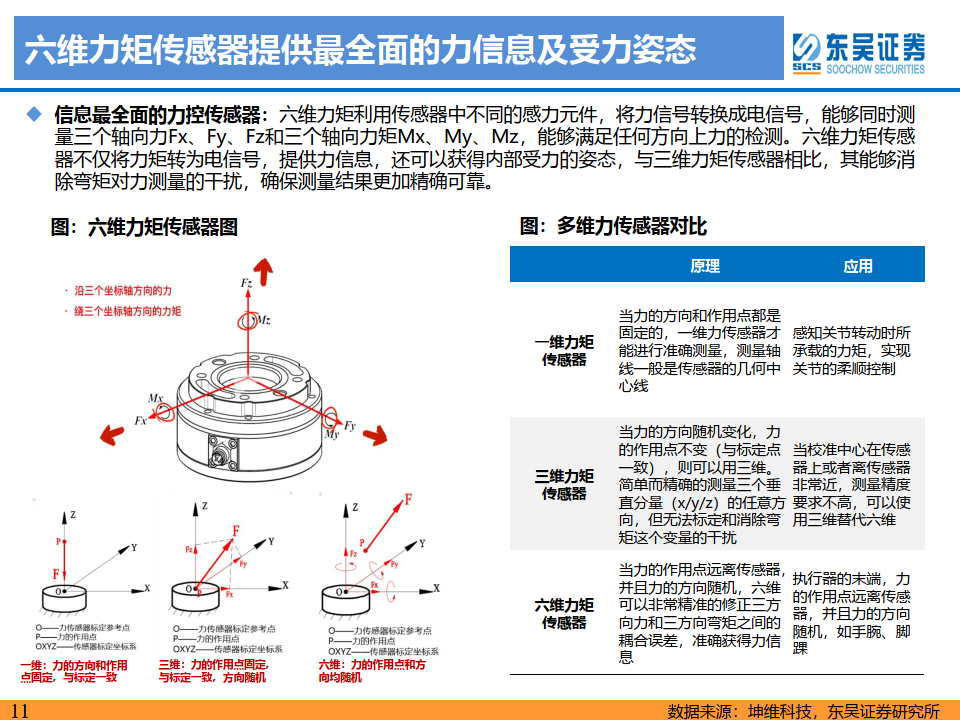
六维力矩传感器(图片来源:东吴证券)
位置/角度传感器
-
编码器:磁敏元件(如霍尔传感器)或光电式传感器,监测关节角度(分辨率达0.1°)。
-
应用案例:德国宇航中心DLR-II灵巧手使用磁钢+霍尔传感器实现关节位置闭环控制。
接近觉传感器
-
技术路线:超声波、红外或激光雷达(如禾赛科技JT系列),用于环境建模和避障。
温度传感器
集成方式:嵌入柔性触觉传感器或独立模块,用于热物体抓取(如医疗场景)。
目前灵巧手传感器的产业代表如下:
六维力传感器
宇立仪器:市场份额12.2%,产品对标海外。
柯力传感:已量产六维力传感器,供应华为等协作机器人客户。
ATI:工业机器人首选,FC-Delta系列动态精度达0.1%FS。
BOTA SYSTEMS:医疗与协作机器人专用,FC-Medusa支持-40℃~70℃宽温域。
触觉传感器
蓝点触控:柔性传感器应用于医疗假肢。
汉威科技:布局压电式触觉传感器。
特斯拉:自研MEMS阵列传感器,支持鸡蛋等易碎品抓取。
Shadow Robot:QTC压阻材料实现指尖力感知。
接近觉传感器
禾赛科技:JT系列3D激光雷达,视场角360°×187°。
奥比中光:dToF传感器芯片LS635,应用于服务机器人。
SICK(德国):激光雷达传感器,精度±1mm。
松下(日本):红外传感器,响应速度<5ms
柔性传感器
瑞尔特测控:碳基柔性传感器,迟滞<0.1%FS。
PolyOne(德国):导电聚合物材料,延展性>300%。
五、灵巧手的灵魂---空心杯电机
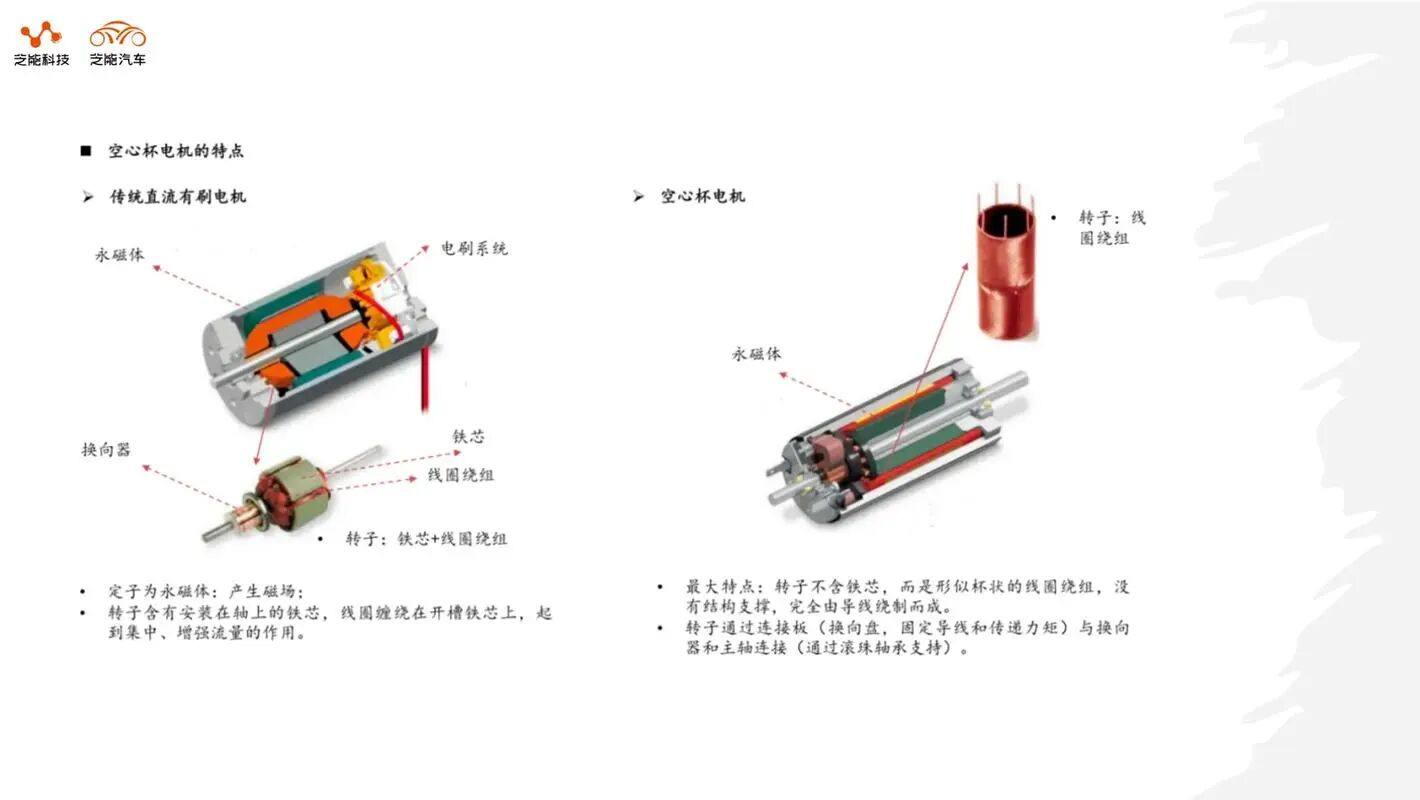
传统直流有刷电机和空心杯电机(图片来源:芝能汽车)
宇树科技的Dex3-1的灵巧手电机有7个,3个手指有6个自由度,大拇指一个旋转自由度。
其电机均为空心杯电机,目前供应商暂时无法得知,小编知道后,会第一时间告诉大家,下面对此电机做个简单介绍:
空心杯电机是人形机器人灵巧手的关键零部件。对于人形机器人而言,其手指空间狭小,因而人形机器人手指关节需配备更多小型化且能够输出较大力的电机,属于直流永磁伺服电动机的空心杯电机完美契合人形机器人对应手指关节轻量化、高精度等需求,故完美契合其需求。
目前以特斯拉为代表的着力于人形机器人量产化的企业主要采用了空心杯电机方案。效率高、转速快、响应快,空心杯电机具有良好的节能效果、动力性能及控制性能。

特斯拉空心伺服电机(图片来源:民生证券)
空心杯电机在结构上突破传统电机的转子结构形式,采用了无铁芯转子,也叫空心杯型转子。
这种新颖的转子结构彻底消除了因铁芯形成涡流而造成的电能损耗。同时空心杯电机重量和转动惯量大幅降低,从而减少转子自身的机械能损耗。
由于转子结构变化而使电机的运转特性得到极大改善,不但具有突出的节能特点,更为重要的是具备了铁芯电机所无法达到的控制和拖动特性。
其结构示意图如下所示:
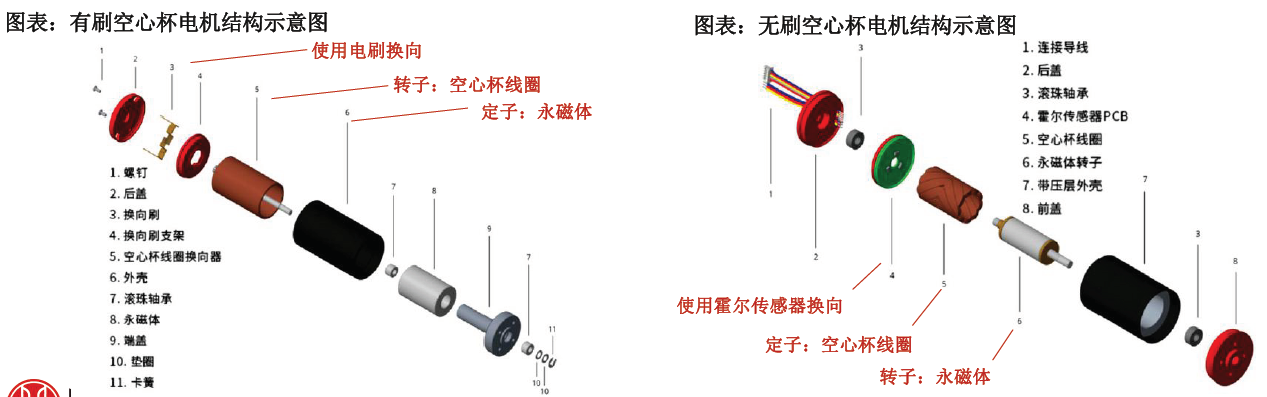
①有刷空心杯电机(也被称为直流有刷无铁芯电机,转子无铁芯): 采用机械电刷换向,一般由机壳、软磁材料内定子、永磁体外定子、空心杯型转子电枢组成。
当空心杯有刷电机通电时,绕组有电流通过,产生转矩,转子开始旋转,若转子转到特定角度,电刷利用机械换向器的方式改变电流方向,使输出转矩方向不变,转子继续旋转。
由于空心杯有刷电机采用电刷换向,电机运行过程中存在着一定的相对摩擦,这就会产生噪声、电火花,降低了电机的使用寿命。 一般国内的“空心杯电机”泛指有刷电机;
②无刷空心杯电机(也被称为直流无刷无齿槽电机,定子无铁芯): 采用电子换向的方式, 一般由机壳,软磁材料、绝缘材料和空心杯电枢构成的定子及永磁钢转子等组成。
空心杯无刷电机通过控制电子元件的通断使不同绕组接入电路,达到换向的效果。这种换向方式使空心杯无刷电机具有效率高、转矩波动小、使用寿命高、结构精巧,维护方便,易保养等特点。
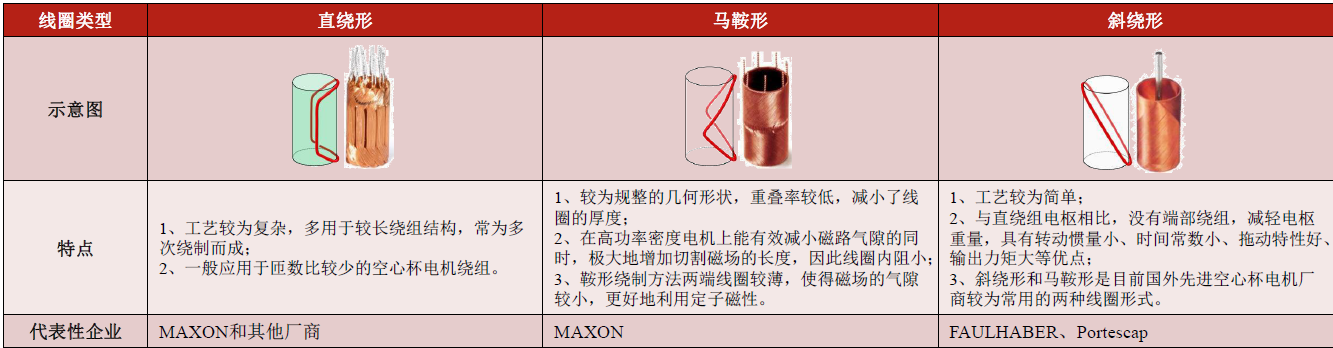
空心杯电机线圈通用的绕制方法(图片来源:中信建设证券)
上图介绍其组成,其目前空心杯电机,不仅在具身智能领域,在其它相关领域也有很大的市场及发展。其产业链示意图如下所示:
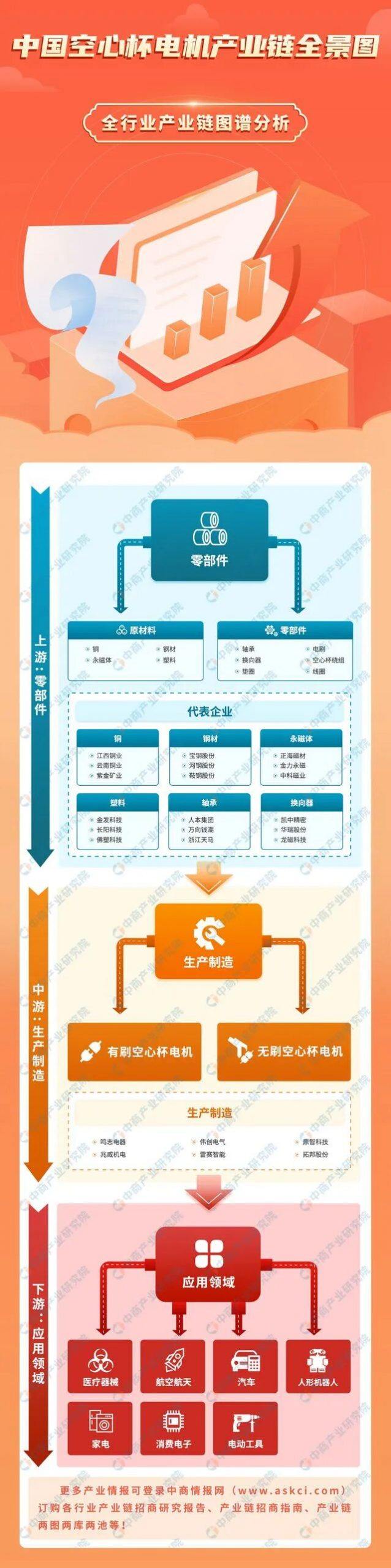
空心杯电机产业链全景图(图片来源:中商情报网)
在其产业链方面,其赛道玩家众多,海外巨头有明显优势。
空心杯电机海外头部企业包括瑞士 Maxon、 德国 Faulhaber 和瑞士 Portescap,国内头部企业为鸣志电器。
海外企业 Orbray、 Nidec、 CITIZEN MICRO、 Allied Motion 等也在全球享有较高声誉。
国内拓邦股份、鼎智科技空心杯电机进展较快,另有万至达电机、昊升电机、鑫宝达电机等未上市公司布局
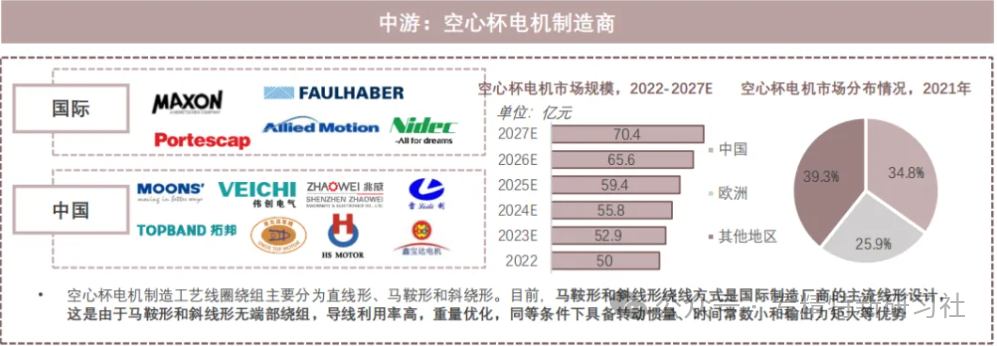
空心杯电机制造商(图片来源:具身智能研习社)
因为空心杯电机是机器人的核心部件,目前头部公司都有自我研发的趋势,就像现在的智能驾驶一样,不研究这个,大家都会失去灵魂,哈哈哈!
◆灵巧手市场现状及未来发展趋势◆
★★★ 帕西尼感知科技★★★
帕西尼感知科技★★★
帕西尼感知科技推出的Dexh13灵巧手是一款集成了多维触觉与AI视觉技术的仿生机器人手,具备以下关键特性:
多维触觉感知:
-
Dexh13配备了1956颗高精度多维触觉传感器,支持全量程0.01n的高精度测量,能够准确捕捉接触面上的细微形变。
-
传感器具备15种多维触觉感知能力,包括压力、温度、材质、滑动等,为应用场景提供了丰富的触觉信息输入。
AI视觉感知:
-
集成了800万像素高清AI手眼相机,基于先进的零样本位姿估计视觉算法,在物体位姿估计方面表现出色。
-
这种“手眼结合”的能力,从某种程度上已经超越了人类,实现了更精准的环境感知和物体识别。
结构设计:
-
Dexh13采用了四指设计,包括一个大拇指和三个手指,能够在四只手指上完成抓、握、捏、按、手指开合等复杂动作。这种设计不仅提高了灵巧手的灵活性,还增强了其感知性能。
驱动与传动:
-
驱动结构采取旋转电机主流驱动方案,手指传动方案采取行星齿轮箱+丝杠+连杆的方式,同时集成了驱动和传感所需的所有组件,结构稳定可靠、运动可测可控。
负载能力与耐用性:
-
具有5kg的强大负载能力,百万次开合,充分证明其满足严苛工业需求的卓越性能。
模块化设计:
-
多维触觉传感器和灵巧手产品具有模块化设计,能够适应复杂环境和任务,实现高效作业。这些特性使得Dexh13在工业制造、精密装配、医疗康养等多个领域具有广泛的应用前景。


帕西尼感知科技Dexh13灵巧(图片来源:帕西尼)
★★★ QB Robotics公司 ★★★
QB SoftHand是由QB Robotics公司开发的一种基于软机器人技术的拟人机器人手。qb SoftHand符合ISO 12100, ISO 13849-1/-2等国际标准,具有19个自由度,设计上模仿了人类手的结构,具有高度的灵活性和适应性。QB SoftHand可以通过单个电机进行控制,实现即插即用,易于控制。
QBrobotics 五指灵巧手:柔性,灵巧,适应性强,可以用于各种工业和协作机器人
• 一个电机协调下的19轴灵巧手。
• 指关节自复位,无需特殊定位和校准,指尖捏紧力可达62N。
• 捏紧状态下,额定负载可达1.7kg, 张手到握拳仅需1.1s。
• 通信简单,支持USB和RS485,可在ROS系统下二次开发。
• 优傲机器人官方UR+认证
• 重量轻:500g
• 反馈变量:电机位置和电机电流

QB SoftHand灵巧手(图片来源:QB)
★★★ 智元机器人(Agibot) ★★★
智元机器人(Agibot)推出的SkillHand灵巧手是一款高仿生、高精度的机器人末端执行器,旨在模仿人类手部的灵活性和操作能力,适用于复杂抓取、精细操作等场景。智元机器人已经形成全系列灵巧手产品,包含12自由度五指灵巧手、6自由度五指灵巧手、二指夹爪、OmniPicker。智元提供的全系列灵巧手解决方案,可以为各类场景提供多样化的解决方案。以下是对其技术要点的解析:
智元机器人SkillHand灵巧手是其自研用于“远征A1”的产品。该视触觉灵巧手包含19个自由度,其中主动自由度12个,由4个模块化的多关节手指和1个具有主动对掌功能的拇指组成,所有驱动内置,整手外观上略小于正常成年男性手,具有拟人的外观和功能,整手抓握5kg,自锁提拉30kg。
仿生设计与自由度
-
多关节仿生结构:SkillHand通常采用5指设计,每根手指包含3-4个关节(类似人类手指的指节),通过微型电机或腱鞘驱动实现弯曲、伸展和侧向运动。
-
高自由度:整手具备19自由度(12主动),支持精细操作如捏取、握持、旋转等,适应不同形状和材质的物体。
-
自适应抓取:指尖配备力传感器和触觉反馈,可动态调整抓取力度(如握鸡蛋或工具时的力度差异)。
驱动技术
-
电机+腱鞘驱动:采用微型高扭矩电机配合腱鞘(类似肌腱的传动机构),减少手指体积的同时提高响应速度。
-
直驱方案(可选):部分关节可能使用直接驱动电机,避免传动损耗,提升控制精度。
-
静音与节能设计:优化电机和齿轮箱结构,降低噪音和能耗,适合人机协作场景。
感知系统
-
多维力觉反馈:指尖集成六维力传感器(检测XYZ轴力/力矩),实现力度精确控制。
-
触觉阵列:部分型号可能配备柔性触觉传感器,识别物体表面纹理和滑动状态。
-
位置编码器:每个关节内置高精度编码器,实时反馈手指位姿。
控制与算法
-
自适应控制算法:基于阻抗控制或力位混合控制,动态调整手指刚度(如抓取脆弱物体时降低刚度)。
-
机器学习辅助:通过示范学习(Learning from Demonstration)优化抓取策略。
-
快速运动规划:结合ROS或实时控制系统,实现毫秒级动作响应。
-
多模态协同:与视觉系统(如RGB-D相机)联动,实现“眼-手”协调操作。
应用场景
-
工业领域:精密装配、电子产品处理、柔性生产线。
-
服务机器人:医疗辅助、老人护理、家务操作。
-
特种作业:危险环境排查、太空或深海设备维护。
技术亮点
-
模块化设计:手指可快速更换,支持定制化(如增加防水/防尘功能)。
-
低延迟通信:采用实时以太网(如EtherCAT)或高速串口,确保控制指令即时传输。
-
开源生态(可选):部分版本可能开放SDK,支持开发者二次开发。


智元机器人SkillHand灵巧手(图片来源:智元机器人)
核心设计理念
-
精密传动优先:基于兆威在微型齿轮箱、精密减速器的技术积累,强调高扭矩密度和低背隙传动。
-
模块化架构:手指关节采用标准化模块(如单关节驱动单元),支持快速替换或定制化扩展(如增加防水/防爆模块)。
驱动与传动技术
-
微型行星齿轮箱:定制化齿轮箱(直径可小至6mm),减速比范围10:1~100:1,兼顾速度与扭矩(峰值扭矩可达5Nm)。
-
采用斜齿轮或谐波减速器,降低噪音(<45dB)和齿隙(<0.1°)。
直驱+编码器方案:
-
部分型号使用无刷电机直驱,搭配17位绝对值编码器,实现关节控制精度**±0.01°**。
-
腱鞘驱动(可选):针对超轻量化需求,部分关节采用高强纤维腱鞘传递动力。
感知与控制系统
-
集成化传感器:
关节扭矩传感器:实时监测电机负载,防止过载损坏。
霍尔效应位置检测:替代传统编码器,降低成本。
-
实时控制架构:基于EtherCAT总线通信,控制周期≤1ms。
-
内置自适应PID算法,动态调整关节刚度和响应速度。
性能参数(典型型号)
指标 参数
自由度(DoF) 12-20(可定制)
单指负载 0.5-2kg(末端抓取)
重复定位精度 ±0.05mm
工作电压 24-48VDC
防护等级 IP54(基础)/IP67(可选)
应用场景
-
工业场景:精密电子装配(如手机主板抓取);汽车零部件柔性生产线(适应多型号工件);特种作业:核电站维护(耐辐射版本);防爆环境操作(通过ATEX认证)。
-
医疗与服务:手术器械辅助操作(需无菌设计);康复训练机器人(力控柔顺性)。


兆威机电灵巧手(图片来源:兆威机电)
核心设计目标
高仿生性:模仿人类手指的抓取、捏握、侧移等精细动作,适应不规则物体。
模块化:可能采用关节/手指模块化设计,便于快速维修和定制化(如3指/5指配置)。
轻量化:通过材料(如碳纤维、航空铝)和结构优化降低自重,提升负载比。
关键技术点解析
(1)驱动方式
电机+谐波减速器方案:高精度伺服电机配合谐波减速器,实现关节的精准控制(扭矩密度高、回差小)。
腱传动(可选):部分灵巧手采用线缆驱动,减轻末端重量,但可能存在迟滞问题。DexHand021可能优化了腱绳材料(如超高分子量聚乙烯)以减少摩擦损耗。
(2)传感器系统
多维力觉反馈:指尖集成6轴力扭矩传感器,实现力度控制(如捏鸡蛋不碎)。
触觉阵列:高密度压力传感器模拟皮肤触觉,辅助滑移检测。
关节编码器:高分辨率绝对值编码器确保位置闭环控制。
(3)控制算法
自适应抓取规划:基于视觉(RGB-D相机)和力觉的混合控制,实时调整抓取姿态。
强化学习训练:通过仿真环境(如MuJoCo)训练抓取策略,迁移到实体硬件。
抗干扰策略:动态阻抗控制应对物体位移或外部扰动。
(4)通信与集成
实时总线协议:可能采用EtherCAT或CAN FD,满足多关节低延迟同步控制。
ROS 2支持:提供标准化接口,便于与机械臂/移动平台集成。
性能参数推测
(基于同类产品推测,非官方数据)
自由度:9-15个(每指3个,拇指可能更多)。
抓取力:单指末端力≥10N,整手负载≥5kg。
重复定位精度:±0.1mm级。
重量:≤1.5kg(含线缆)。
应用场景
工业精密装配:电子元件插接、细小零件分拣。
医疗辅助:手术器械操作、康复训练。
特种作业:核环境、太空等危险场景替代人工。



灵巧智能灵巧手(图片来源:灵巧智能)
★★★ 星动纪元 ★★★
星动 XHAND1 作为星动纪元 STAR1 人形机器人的核心执行末端,是一款五指机器人灵巧手解决方案。星动 XHAND1 采用五指设计更接近人手的灵活性和操作能力,并且这种设计允许每个手指具有相同结构,简化生产和维护过程,提高了系统可靠性。
-
自由度:星动 XHAND1 总共具有 12 个主动自由度,其中拇指和食指各有 3 个,其他三指各有 2 个自由度,支持食指侧摆,拇指具有大范围活动能力,能够实现多手指间灵活协同动作,比如拇指能与小指对指、拧瓶盖等动作。
-
纯电驱方式:避免了液压和气动驱动在小型化和应用中的局限性,且每个自由度都有对应的驱动源,能够独立控制所有手指的每个自由度,实现全自主五指关节驱动。相比欠驱方案,星动 XHAND1 关节数 = 自由度数,每个关节在本位实现纯齿轮准直驱传动,给模仿学习、强化学习等 AI 算法的开发提供了充分解耦的控制,同时每个关节均可以反驱,抗冲击能力更强。
-
传感器:星动 XHAND1 每个手指配备一个高分辨率(>100 点)触觉阵列传感器,提供三维力触觉和温度信息,不仅能感知物体边缘和形状、硬度和温度,还能够感知微小的压力变化,精度可达 0.1N,能与外界环境进行交互。星动 XHAND1 单手最大握力能达 80N,可举起 25Kg 的哑铃,而整手的尺寸远远小于同负载和握力的绳驱和推杆方案。
-
星动 XHAND1 支持全面开放的底层控制接口具有很强的可扩展性和灵活性,可以根据具体需求进行定制和优化,促进了模仿学习和强化学习等 AI 算法的开发。

星动 XHAND1灵巧手(图片来源:星动纪元)

普渡机器人灵巧手PUDU DH11(图片来源:普渡机器人)




傲意科技推出的ROhand系列灵巧手产品,有11个运动关节,内置6个电机驱动器和电机控制电路,具有6个主动自由度。内置PID电机控制算法,能够轻松完成抓握、侧捏、握手等复杂动作,指尖承载力高达10公斤。
腾讯 Robotics X 实验室公布的自研三指机器人灵巧手TRX-Hand,兼具高灵巧和高负载速度的特性,拥有8个可独立控制关节,自重仅1.16千克,最大持续指尖力可达15牛,最大关节速度不低于600度每秒,可轻松应对不同形状尺寸物体的抓取和操作,对高动态的抛接动作也游刃有余。同时,柔性驱动的指尖设计有效提升了手指的抗冲击能力。

腾讯TRX-Hand灵巧手(图片来源:腾讯)
大寰机器人2024年推出的灵巧手DH-5,模仿人手构造,采用高度集成化设计,整手有6个通过微型电缸驱动的主动自由度,并通过连杆实现11个自由度,手掌骨架采用7系铝合金制作,外壳采用工程塑料材质,重量更轻。
大寰机器人DH-5灵巧手(图片来源:大寰机器人)
钧舵机器人的第三代三指灵巧手可配合人形机器人的视觉、智能感知能力,通过视觉采集的数据进行抓取策略的分析,可自动下发控制指令来实现自动抓取。
Casia Hand系列灵巧手及通用类人灵巧操作机器人(图片来源:钧舵机器人)

灵巧手未来发展趋势包括:
-
微型驱动器布局优化:将驱动器集成至手掌或手指内部,通过结构紧凑化设计提升灵巧手的灵活性和效率。
-
多感知功能融合:力传感器、触觉传感器及位置传感器的协同作用,使灵巧手能够精准识别物体特性,实现更高水平的智能化操作。
-
多自由度设计:仿生化多自由度设计将继续优化灵巧手的灵活性,使其能够胜任精细抓取和复杂任务,为多场景应用提供支持。
机器人灵巧手的快速发展不仅重塑了工业制造与服务领域的生产模式,还为未来人机协作的无缝连接奠定了技术基础。作为新一轮技术革命的核心组成部分,灵巧手将助力智能制造迈向更加灵活、高效、智能的新时代。
小 结:
灵巧手正从“功能工具”向“智能伙伴”演进,技术融合、场景拓展与成本优化驱动其成为机器人领域的关键部件。未来,随着感知、驱动与AI技术的突破,灵巧手将深度融入工业、服务与极限环境,推动人机共融新时代的到来。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
