
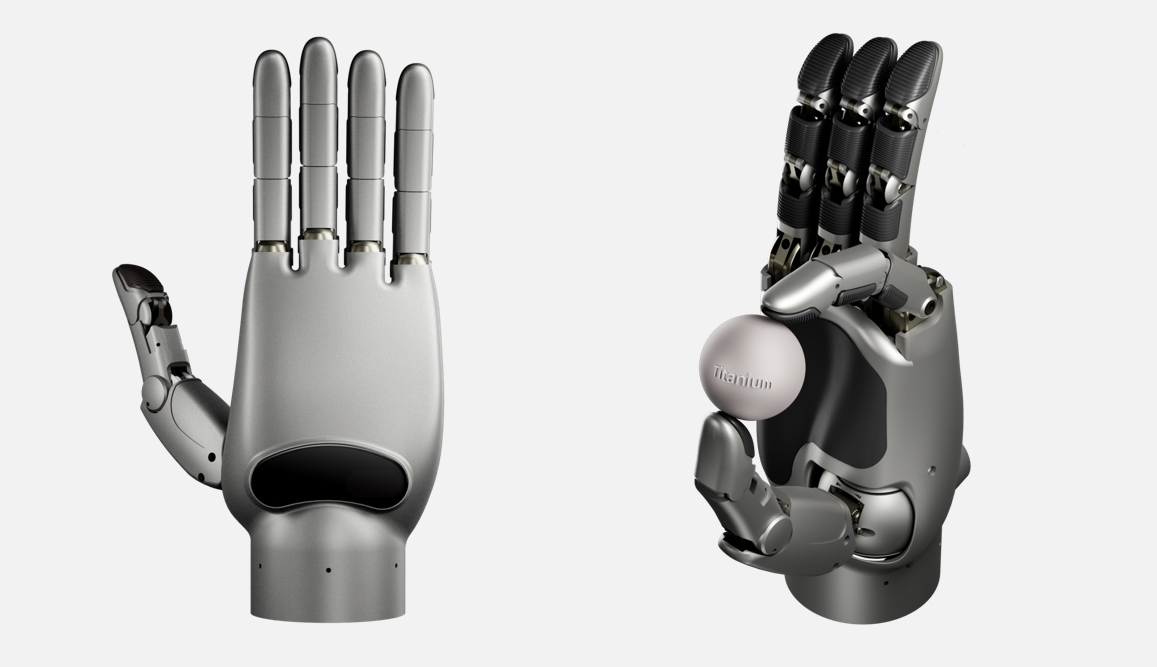
一、什么是灵巧手?为什么它如此重要?
功能实现的关键:灵巧手占人形机器人整机成本的14-18%,工程量可能占到整机开发工程的一半,直接决定机器人的操作能力。
高泛化能力:与传统工业夹爪只能执行特定任务不同,灵巧手能够适应多变的工作场景,实现多任务迁移。
人机交互的桥梁:灵巧手集成了丰富的传感器,是机器人与物理环境交互的重要接口。
二、灵巧手三大核心解析
1. 驱动:提供动力的“心脏”
a、性价比高
b、功率高、耐用性强
c、适合低速高功率场景
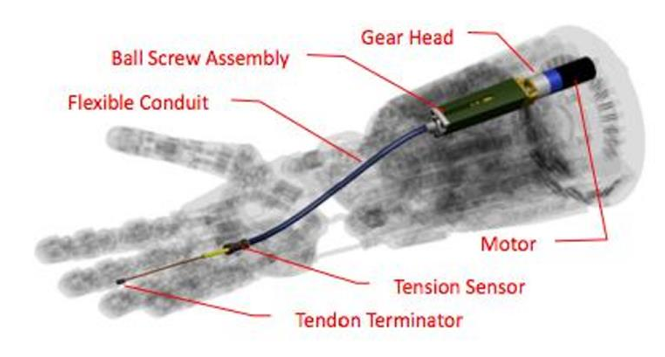
2. 传动:动力传递的“神经网络”
优点:节省空间、柔韧性好、适合高自由度设计
缺点:长期使用易拉伸变形,影响精度
优点:刚度大、负载能力强、结构稳定
缺点:体积大、重量高、抗冲击能力弱
3. 感知:与环境交互的“感官”
压阻式:灵敏度高、成本低
电容式:响应速度快、受温度影响小
磁电式:能测量多种触觉信息,但成本高
视触觉:融合光学成像与触觉感知,输出图像化触觉信息
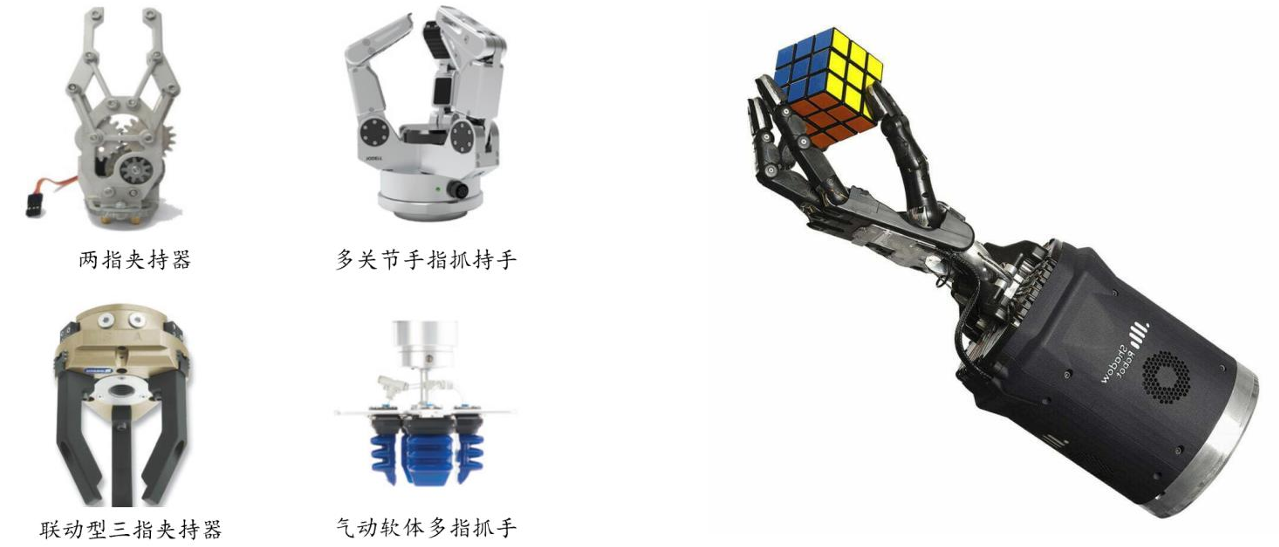
三、灵巧手技术路线:仿人vs特化
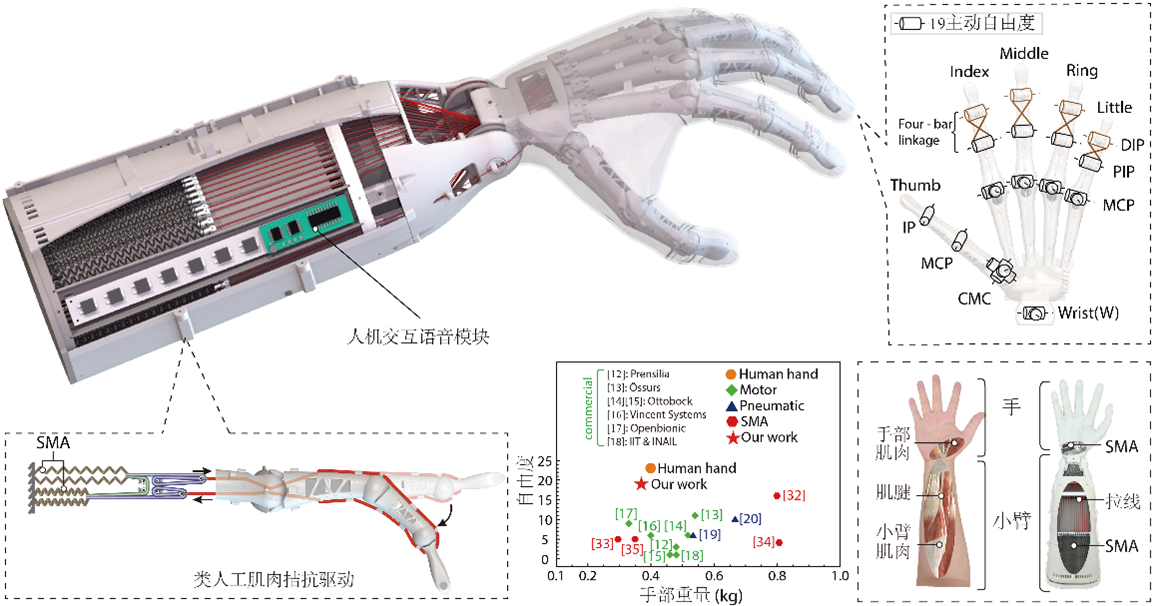
1. 仿人路线:主流选择
a.自由度接近人手(通常15-22个自由度)
b.采用腱绳传动模拟人手肌腱
c.配备丰富的触觉传感器
d.向柔性电子皮肤方向发展
2. 特化路线:创新突破
a.中国科大团队的触手形执行器,模仿章鱼触手,实现高适应性抓取
b.加州大学团队的卷尺形执行器,具备轻量化、柔性特点
四、应用场景与技术要求
1. 工业场景:精度与可靠性并重
a.可能采用直流无刷电机替代空心杯电机以降低成本
b.倾向使用连杆传动方案,保证控制精度
c.对触觉传感要求相对较低
2. 特殊场景:强化感知与防护
a.强化感知功能,实时精准获取环境数据
b.特化防护性能,应对极端环境
c.可能采用特化路线的灵巧手设计
3. 消费场景:灵活性与交互性优先
a.高灵活性和泛用性(空心杯电机+腱绳传动)
b.丰富的触觉感知(柔性电子皮肤)
c.拟人化的交互体验
五、行业发展趋势与机遇
1. 技术趋势
自由度提升:从目前的6-20个自由度向人手的27个自由度发展
传感器用量增加:从单一触点到全手阵列式感知
成本下降:国产化推动价格从数万元向万元以内下探
2. 市场前景
3. 入行建议
夯实基础:掌握机械设计、电机控制、传感器技术等基础知识
关注主流方案:深入了解空心杯电机、腱绳传动等成熟方案
学习创新技术:关注柔性电子皮肤、特化设计等前沿方向
实践为先:通过开源项目或实验平台积累实际经验
结语

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
