
点击蓝字 关注我们
CasiaHand
中科硅纪
导语
CasiaHand
中科硅纪
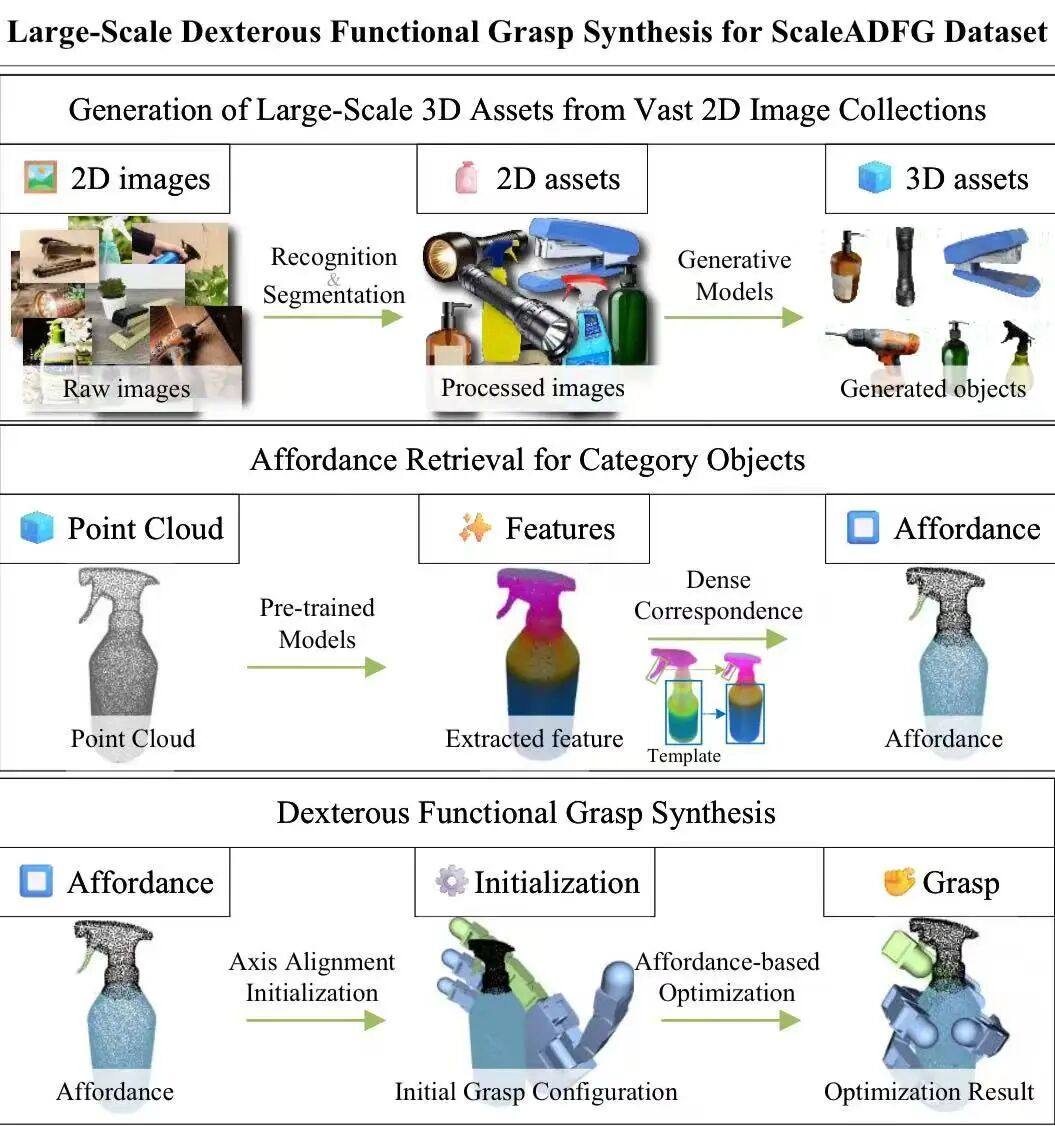
近日,中科硅纪在类人灵巧操作具身大脑方面取得新进展。中科硅纪联合中国科学院自动化研究所提出面向机器人灵巧手的多尺度功能性抓取模型:ScaleADFG(Affordance-based Dexterous Functional Grasping via Scalable Dataset),突破了传统依赖人工示教的技术路径,实现灵巧手对工具类物体“以使用为目的”的自主精细化抓取操作能力。
让机器人能够像人类一样理解和使用多样化的“工具”和“基础设施”,是具身智能机器人落地工厂和家庭等场景的关键。尽管深度学习推动通用抓取策略在稳定性和泛化性上进步显著,但在“功能性操作”方面,现有方法面临两大瓶颈。一是数据稀缺且构建成本高;二是手-物尺度不匹配引发泛化性问题。
为解决这些挑战,ScaleADFG 构建了一种全自动数据集构建流程与轻量级抓取生成网络,突破对人工示教的依赖:
-
数据生成方面,ScaleADFG - Dataset 以自动化流程替代人工,利用预训练特征提取器实现 Affordance 高效标注,仅需手动标注单个模板物体,就能将功能性标签自动传播到同类别其他物体,解决了传统方法成本高、规模有限的问题。
-
轻量化模型方面,通过多尺度抓取合成算法,有效解决灵巧手与物体尺寸不匹配的难题,让相较人手较大的机器人灵巧手也能稳定抓取日常小尺度物体。
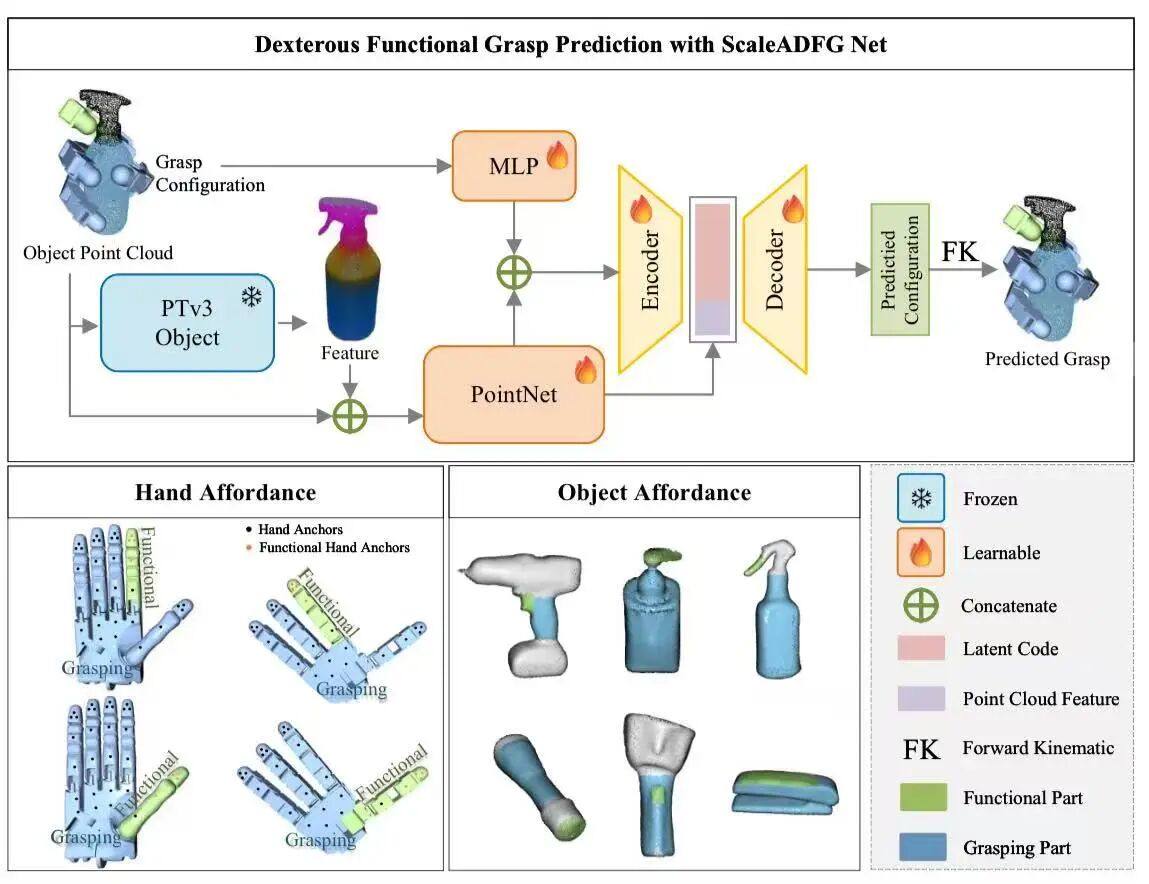
基于ScaleADFG网络的灵巧手功能性抓取配置预测
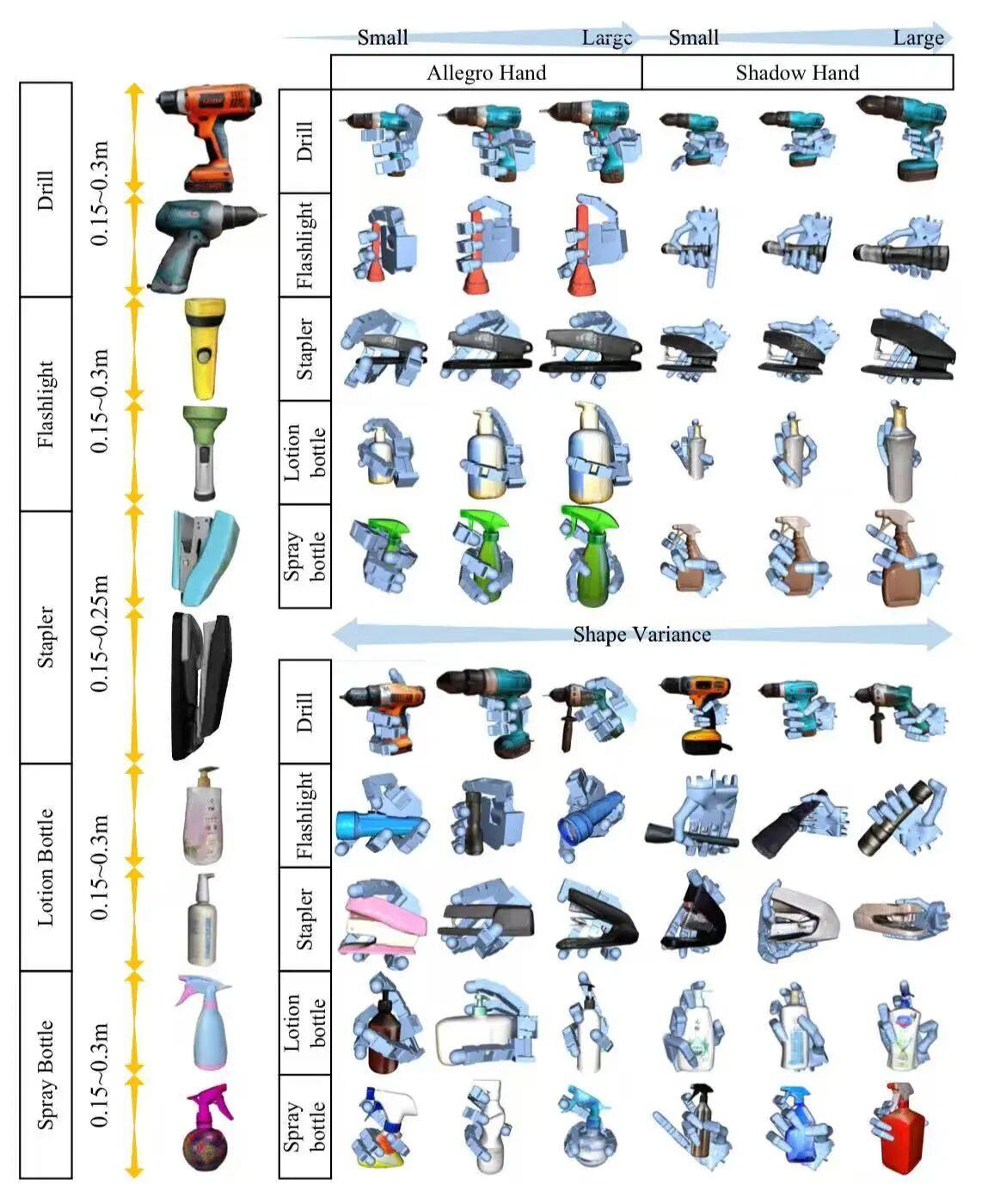
多尺度功能性抓取数据集ScaleADFG-Dataset
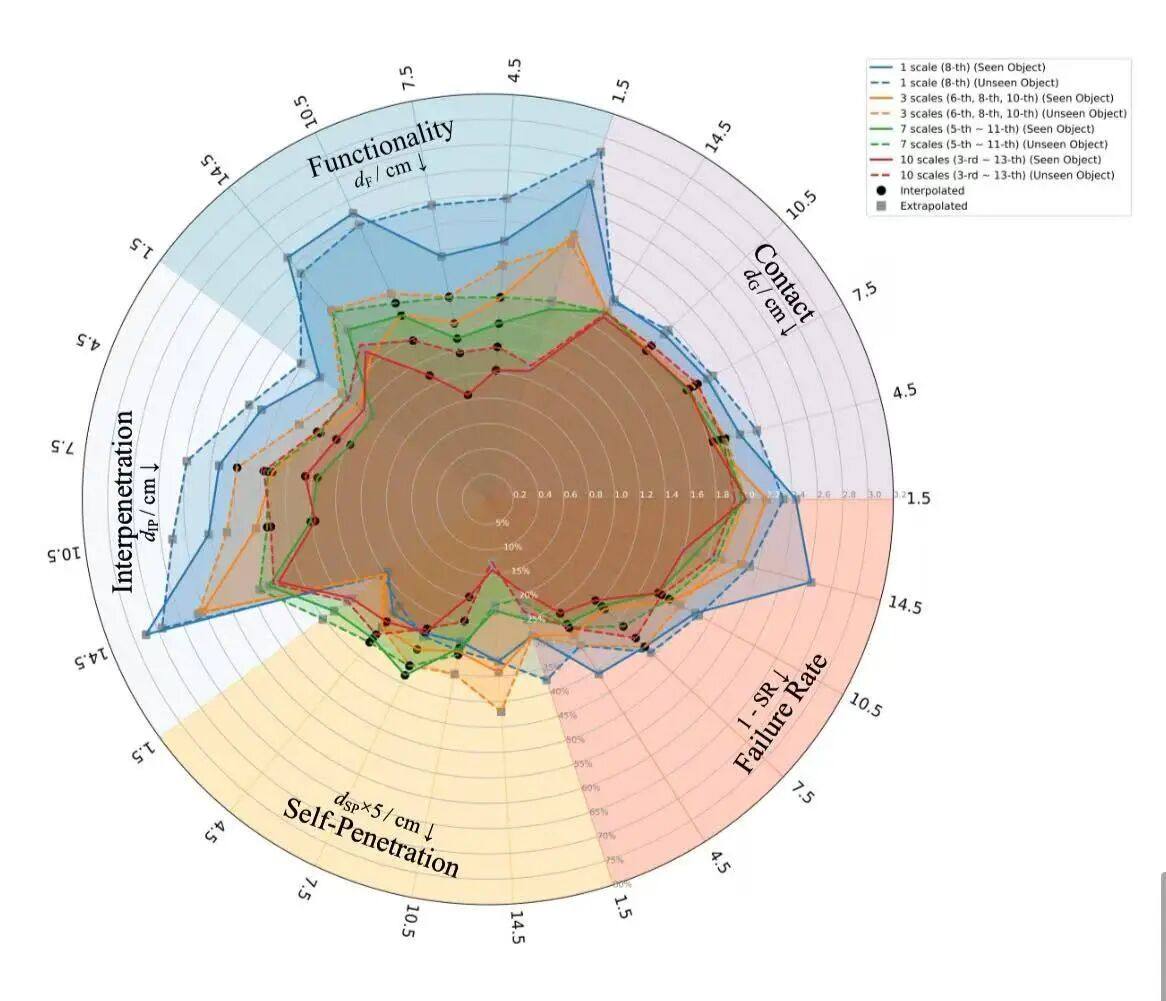
ScaleADFG泛化性能实验结果
-
家庭服务领域:支持灵巧手像人一样使用不同尺寸的家用工具和基础设施,提升服务机器人的实用性与普适性。
-
工业制造领域:助力工业机器人自主使用不同规格的生产工具,为柔性制造体系的构建提供关键技术支撑。
中科硅纪将持续深耕并引领类人灵巧操作具身智能,在突破实用化灵巧手技术的同时,构建类人灵巧操作具身大-小脑融合模型。通过软-硬件协同进化,实现类人灵巧操作机器人在工业、服务和特种应用场景的渐进式落地。
关于中科硅纪
Casia Hand
中科硅纪

扫码关注
中科硅纪
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
