

在智能机器人、可穿戴医疗、脑机接口等领域,人机交互的核心需求正从 “简单响应” 升级为 “精准理解”。传统电子皮肤要么只能单一感知压力、应变等物理信号,要么多模态传感器堆砌导致信号干扰、贴合性差,难以实现复杂场景下的高精度上下文交互 —— 就像 “看得见却摸不着”“摸得到却读不懂”,无法满足机器人精细操作、医疗精准监测等高端需求。
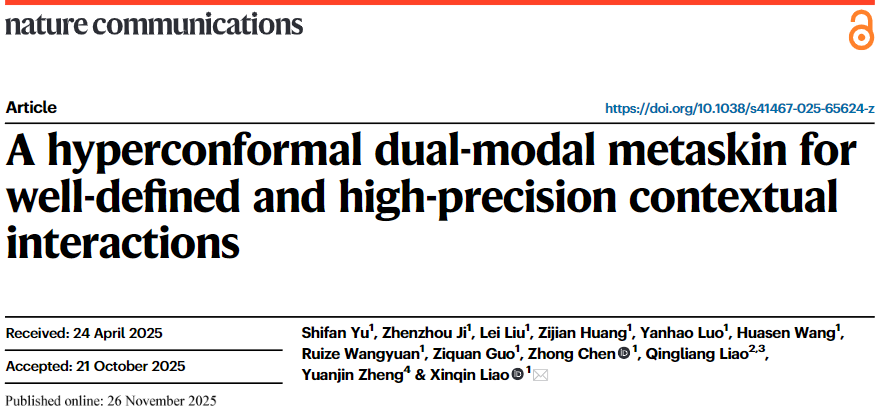
如今,厦门大学团队在《Nature Communications》发表的创新研究,推出了超适形双模态(HDM)超皮肤!它仅10微米厚,能紧密贴合皮肤褶皱,同步捕获肢体运动(本体感觉)和触觉位置(外感受觉),还能通过算法区分信号、理解交互语境,为高端人机交互带来革命性突破。
研究成果
1. 超适形设计:10 微米薄膜,无缝贴合无负担
HDM 超皮肤采用 8-10 微米厚的亲水性聚氨酯(WPU)薄膜为基底,搭配两步转移策略,可无应变贴合皮肤及任意不规则表面:
薄膜厚度与皮肤褶皱尺度相当,能精准捕捉细微拉伸变化,且几乎无异物感;
水基银纳米复合导电路径与基底通过氢键强耦合,经200次胶带剥离测试仍完好,耐磨、耐湿度(90% RH)、耐温度(25-60℃),环境适应性强。
2. 双模态感知:单通道区分运动与触觉,无串扰
创新通过信号极性差异实现双模态分离,无需复杂阵列:
运动感知:皮肤拉伸时,导电路径中银纳米颗粒形成微裂纹,电阻正向增加,应变灵敏度(GF)达32.45(0-20% 应变),能精准追踪关节弯曲角度;
触觉感知:接触导电触发体时,回路电阻反向降低,触摸位置与电阻变化线性相关,即使在拉伸状态下,定位误差也小于2.6%;
单通道即可同步传输两种信号,结构极简且无串扰。
3. 多场景实用化:懂语境,适配复杂交互
结合时序机器学习(CNN-LSTM),超皮肤能提取交互语境与动作线索,实现多场景精准应用:
contextual 导航:手腕佩戴 U 型超皮肤,触摸位置控制六足机器人方向,手腕弯曲状态调节行进姿态,适配障碍与平地等不同场景;
便捷人机交互:手指佩戴可实现虚拟打字与鼠标控制,仅需轻微屈伸与触摸,适配运动障碍人群;
物体交互识别:通过触摸与摩擦,能区分棱柱、球体等不同几何形状,还可通过握姿切换虚拟鼓类型,实现空气击鼓等趣味交互。
图文导读
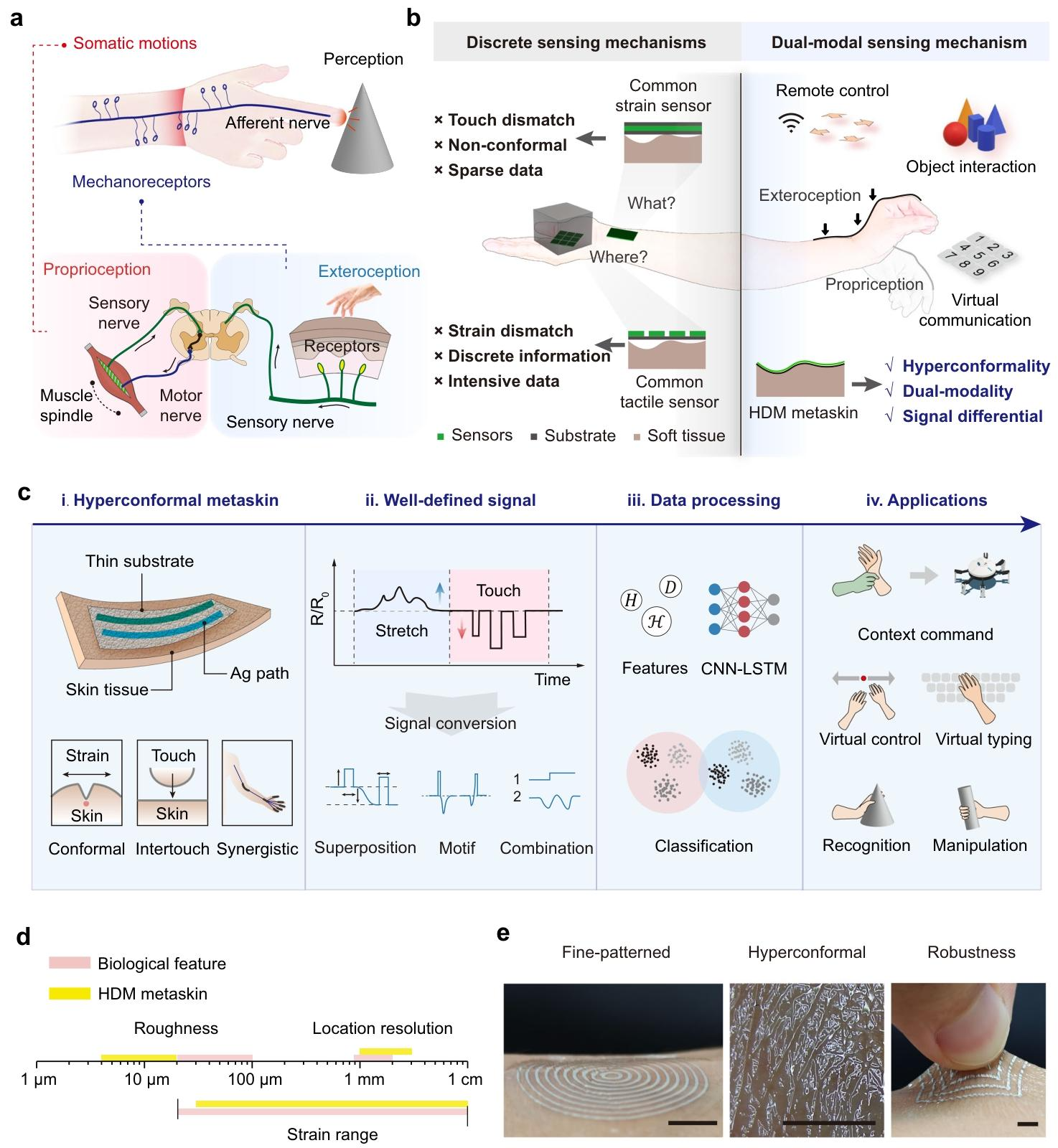
图1 类人感官功能的超适形双模态(HDM)超皮肤
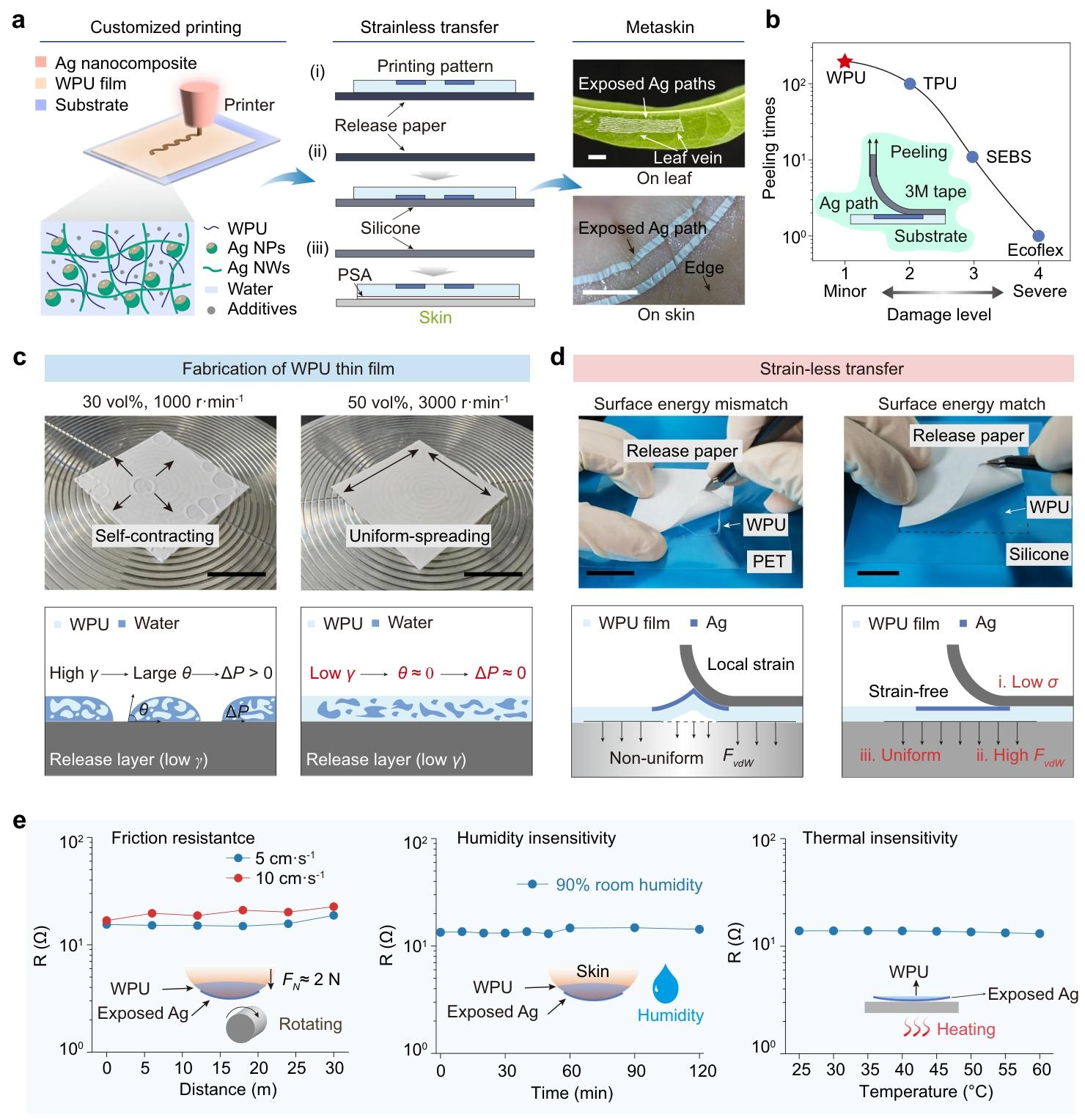
图2 超适形双模态(HDM)超皮肤的制备与转移
图3 应变传感与触觉定位传感的清晰信号
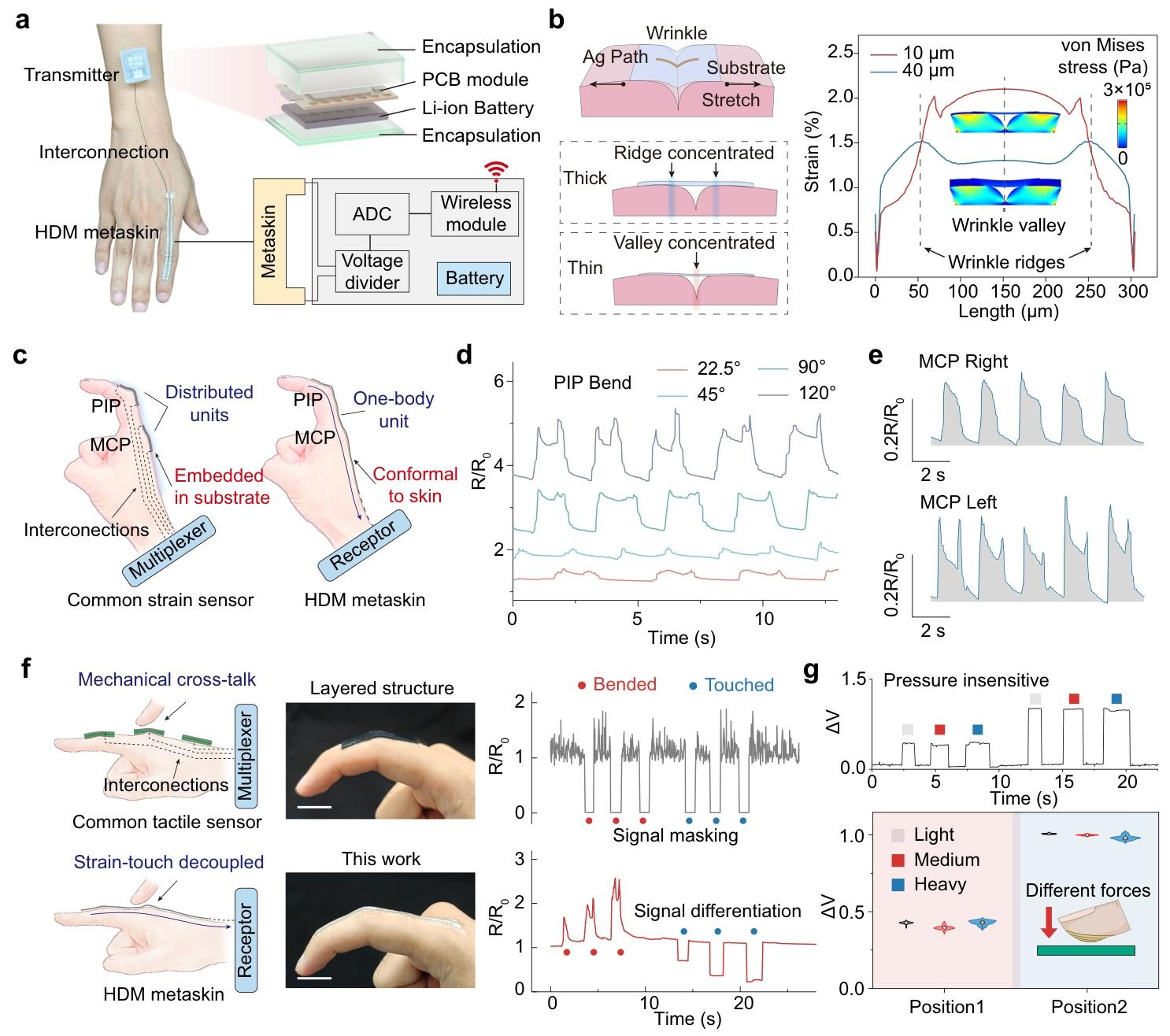
图4 超适形双模态(HDM)超皮肤的在体性能
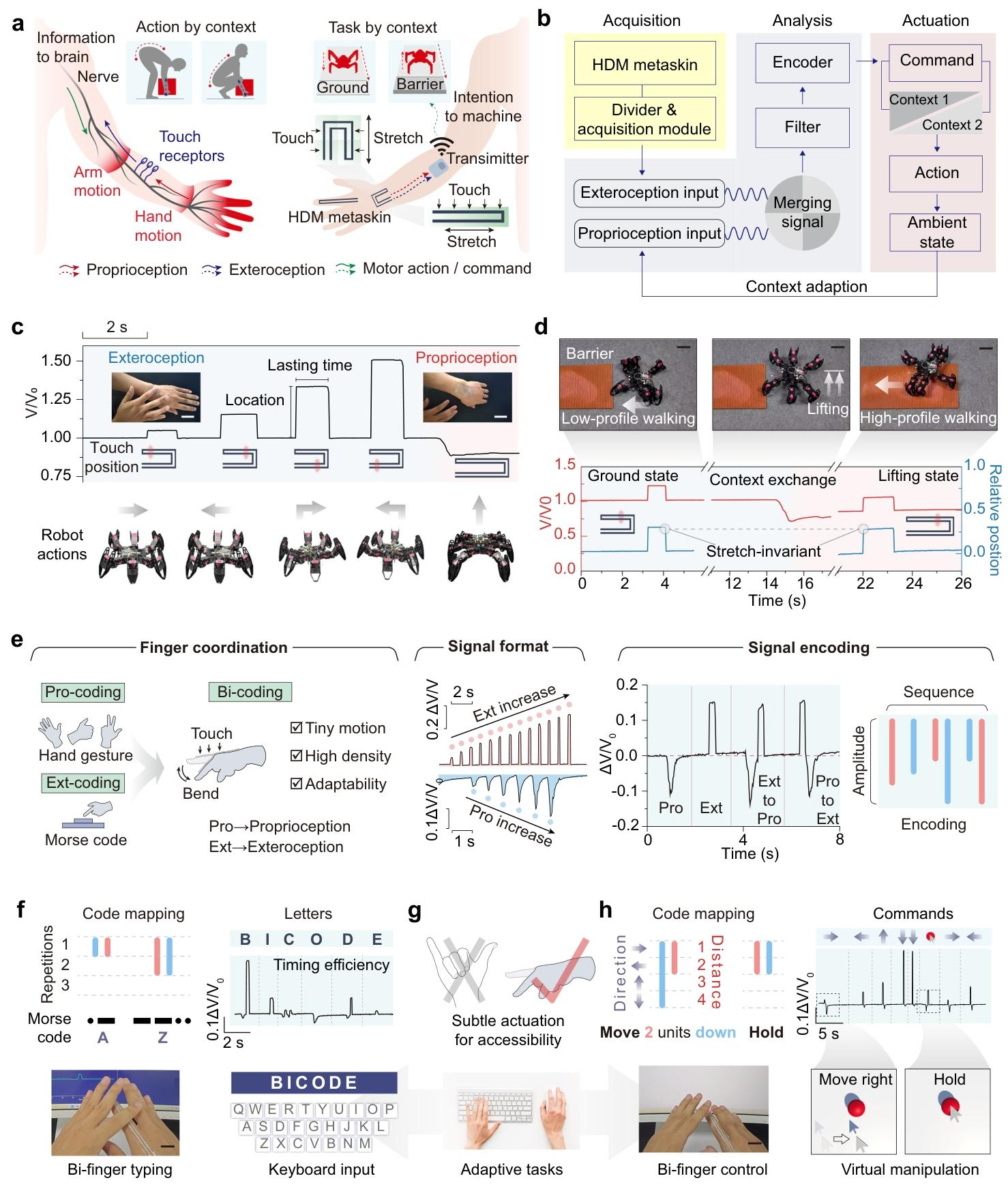
图5 基于本体感觉语境的导航与操控应用
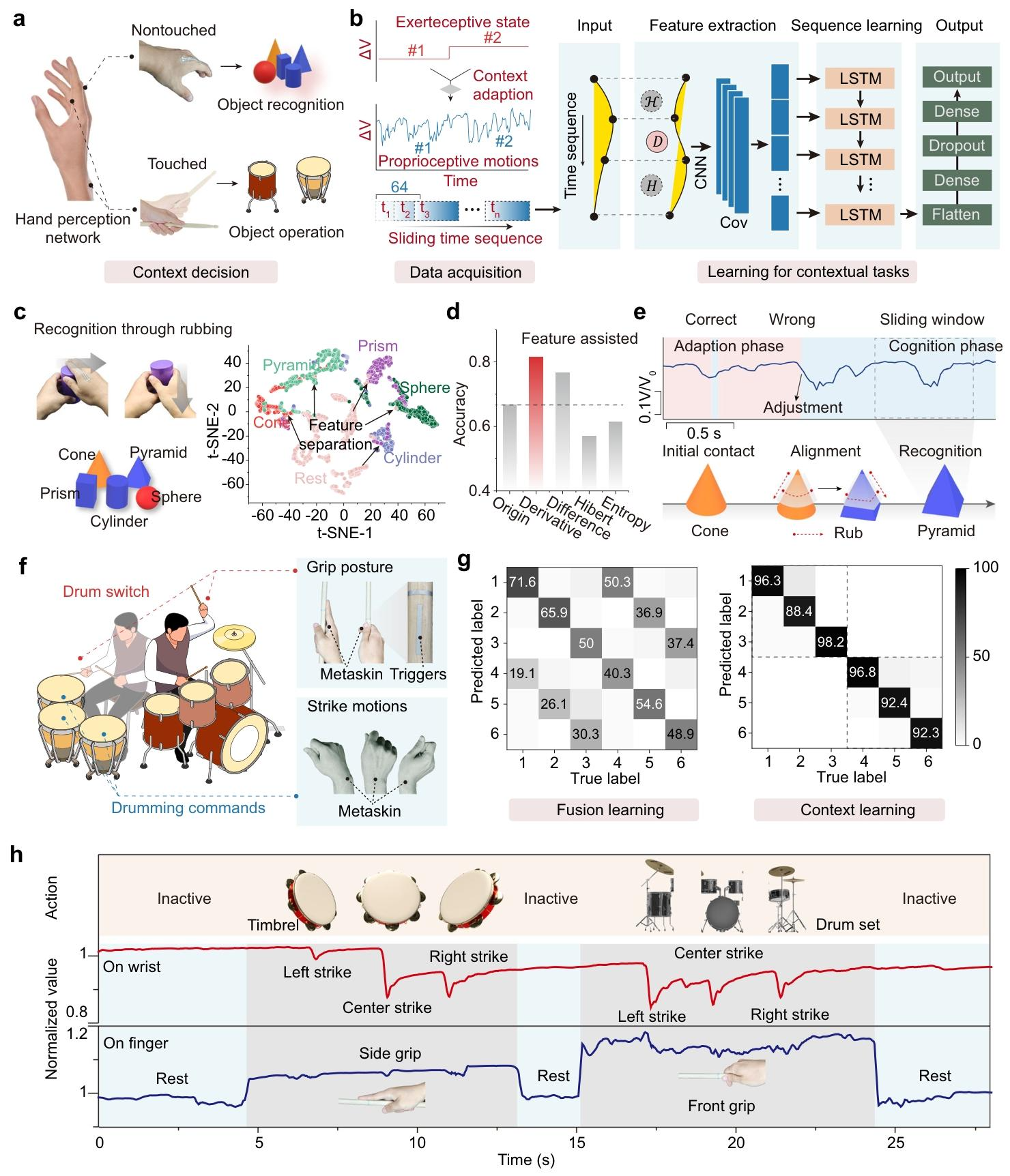
图6 基于触觉语境的物体交互
总结
HDM 超皮肤通过 “超适形结构 + 双模态信号编码 + 智能算法” 的创新组合,彻底解决了传统电子皮肤贴合差、信号乱、结构繁的核心痛点。它不仅实现了物理层面的无缝贴合,更通过极性信号区分与语境解读,让机器能 “读懂” 人类动作意图,推动人机交互从 “被动响应” 向 “主动理解” 跨越。
未来,该技术有望广泛应用于智能机器人、康复医疗设备、脑机接口、沉浸式体感设备等领域。随着向多手指、多关节全面部署,其将进一步缩小人机交互的 “感知鸿沟”,让机器更懂人、交互更自然,为智能科技领域带来全新变革。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
