
01
触觉,实现通用性的“最后一公里”
触觉感知技术是人形机器人灵巧手实现精密操作的核心基础,更是推动具身智能走向通用泛化的关键支撑。尽管视觉与运动控制已取得长足进步,但如何让机器人像人类一样通过指尖感官捕捉细微的物理交互,仍是当前产业发展的核心瓶颈。
以特斯拉Optimus Gen-2为例,其能够稳健地完成从纸浆蛋托中捏取鸡蛋并精准入锅的动作,本质上是触觉传感器对微小压力与摩擦力实时反馈的结果。只有攻克触觉传感器在感知位姿、硬度、肌理及温度等特征上的精度与灵敏度等难题,机器人才能真正具备处理易碎、柔性或复杂纹理物体的精细操作能力。
触觉传感技术路线众多,包括压阻、电容、压电、磁电霍尔效应、摩擦电、光学和视触觉等,各路线在实际落地中均存在性能与成本端瓶颈。柔性触觉传感器对核心性能指标要求严苛,需具备高灵敏度(可检测细微压力变化)、宽动态响应范围(实现大跨度压力探测)、良好线性度(不同受力下保持稳定输出特性)及低延时(快速响应压力施加与释放)等关键特性。上述性能的实现依赖材料、制造、算法等多维度的复合能力,行业技术壁垒较高。
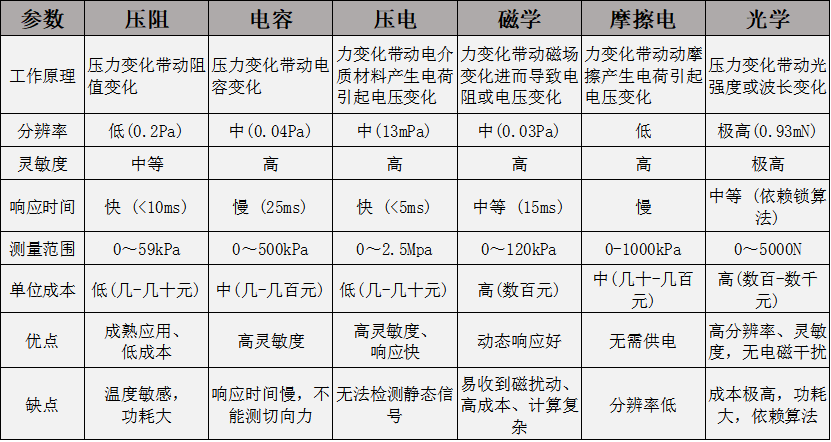
数据来源:《柔性触觉传感技术及其在医疗康复机器人的应用》,公开数据整理
02
从指尖到全身,人形机器人带来百亿增量
先来看触觉传感器整体市场,据Verified Market Research数据显示,2024年全球触觉传感器市场规模为153.3亿美元,预计到2031年将达到355.9亿美元,2024—2031年期间年复合增长率为12.79%,整体市场增速并不高。
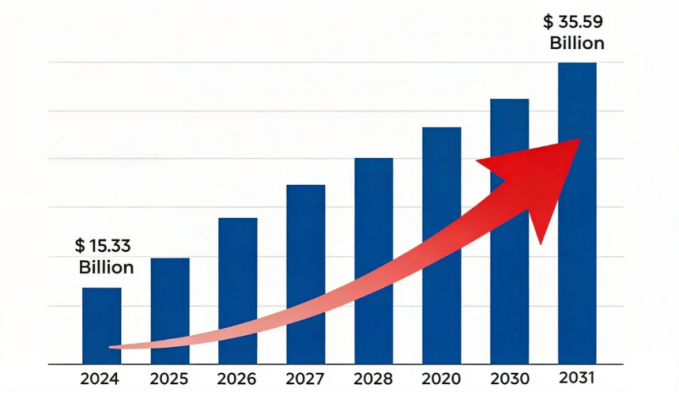
图:全球触觉传感器市场规模预测,数据来源:Verified Market Research
再细看主要品类占比和终端市场占比。由于压阻式与电容式触觉传感器产业成熟、制造成本较低,应用最为广泛。据华经产业研究院统计,上述两类触觉传感器的市场占比分别为37%和28%;从下游应用结构来看,触觉传感器以高端制造为主要应用场景,制造业、航空航天与国防、汽车行业的应用占比分别为42%、27%和17%。其中,制造业领域主要用于机器人抓取、装配等作业环节;航空航天领域,触觉传感器可用于飞行器的对接、着陆等操作,帮助飞行器精确感知与其他物体的接触状态;汽车领域主要用于内饰的触摸控制按键、座椅的压力感知等。
目前,触觉传感器的终端市场中,人形机器人的应用占比还非常低。但随着特斯拉面向大规模量产设计的Optimus Gen-3即将在2026年亮相,市场对人形机器人的关注点将从侧重躯体控制的动态展示,转向灵巧手的精细操作。当前各人形机器人和灵巧手本体厂商均在积极采用触觉传感器,相应的触觉传感器需求即将迎来爆发式增长。
当前人形机器人的触觉传感器整体仍处于初期尝试阶段,主要应用部位仍集中于指尖,市场规模较小,而指节、掌心等部位的规模化落地仍有极大拓展空间。以一对 5 指灵巧手为例,若在手心面按满配置配备,就需多达 34—40 个触觉传感器模组(四指各 3 个、大拇指 2 个、掌心 3—6 个)。
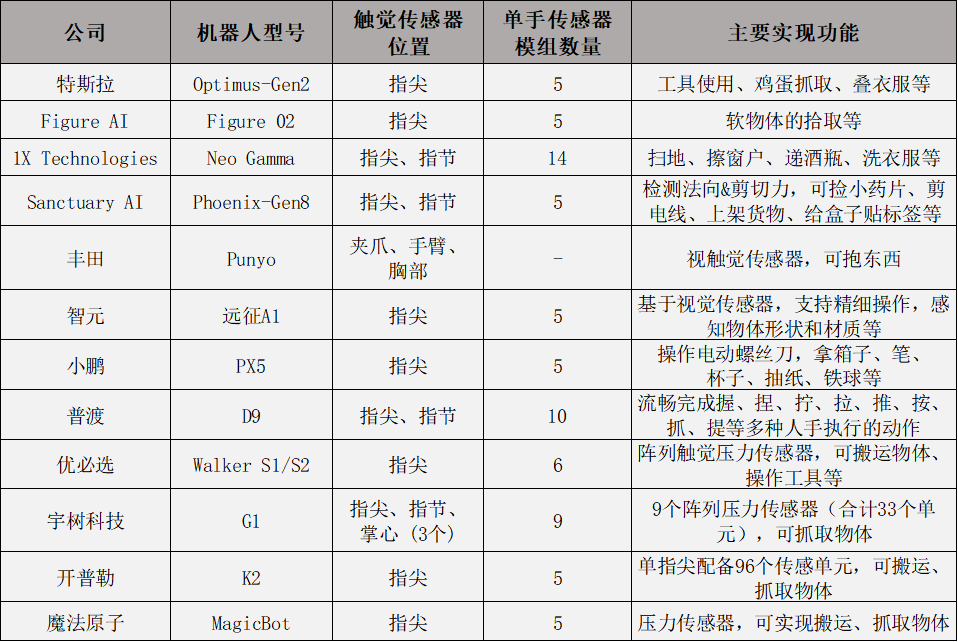
数据来源:各公司官网,国泰海通证券,公开数据整理预估
从长期发展来看,触觉传感器还将以电子皮肤的形态覆盖整个手背,并逐步从手部延伸至身体其他部位,如手腕、手臂、足部,乃至躯干与脸部。根据国泰君安、海通证券测算,若人形机器人To B产量突破100万台,对应的各技术路线触觉传感器市场规模合计能够达到472亿元。
此外,当前人形机器人所采用的触觉传感器仍主要基于力觉感知。而广义的触觉涵盖范围更广,包括力觉、冷热觉、痛觉等所有与接触相关的感觉。这些技术目前仍处于持续研发与迭代之中,对应市场的成长空间十分广阔。

03
本土代表厂商
他山科技
他山科技成立于2017年,是国内领先的AI触觉感知方案商,专注于人工智能触觉传感芯片及软硬件一体化开发。核心产品包括 TS-F指尖触觉传感器(模拟人类指尖感知)、TS-E机械手触觉传感器(覆盖指腹与手掌)以及专为防碰撞设计的TS-S电子皮肤。其自研的 TS3F系列触觉传感芯片(如TS3Fxxx)已实现数万颗出货,广泛应用于人形机器人及汽车电子领域。
技术路线:公司主攻电容式技术路线,基于自研的高分辨率AI芯片(如TS0001A)和解耦算法,攻克了电容传感抗干扰与多维力解析瓶颈。该路径具备接近感应(非接触觉)、压力、纹理及温度的多模态感知能力。此外,公司正通过TS-V视触融合训练平台推动“视触融合”路线,为具身智能提供数据采集与仿真支持,助力灵巧手实现堪比人类的精密交互。
目前,他山科技已与因时机器人、强脑科技、灵巧智能、傲意、灵心巧手、智元、银河通用、自变量等建立合作关系。
能斯达(汉威科技子公司)
能斯达成立于2013 年,是国内柔性微纳传感技术的领军企业,专注于柔性压力、阵列触觉及温湿度传感器的研发。核心产品包括DF系列柔性压力传感器及专为机器人设计的阵列式触觉传感器(电子皮肤)。其产品已在小米 CyberOne 等人形机器人及消费电子、智慧医疗领域实现量产应用,拥有国内首条兆级产能的柔性传感器生产线。
技术路线:公司核心采用柔性压阻式(Piezo-resistive)技术路线,通过将碳纳米管、石墨烯等纳米功能材料集成于超薄柔性基底,利用材料受压后的电阻变化实现精密感测。该路径具备超薄柔性(微米级厚度)、低成本量产及高灵敏度的优势,能够实现多点阵列分布,在大面积“电子皮肤”覆盖和轻量化灵巧手集成方面具有极高的适配性,是目前国内人形机器人触觉方案的主流商业化路线之一。
帕西尼
帕西尼成立于2021年,师承日本早稻田机器人实验室,是国内领先的触觉感知技术方案商,实现了从传感器零部件、灵巧手到人形机器人整机的全链路覆盖。核心产品包括多维触觉传感器,如专业级PX-6AX系列可实现1mm的空间分辨率(与人类指尖分辨率相 当),最小可识别0.01N的力;以及集成触觉与AI视觉的DexH13、DexH5系列灵巧手。其最新推出的TORA ONE人形机器人,通过单手2280颗ITPU(Intelligent Tactile Processing Unit)传感单元实现多达15种多维触觉感知,已在工业制造和商业服务领域实现批量交付。
技术路线:公司核心采用6D霍尔阵列式技术,通过捕捉柔性阵列上的亚毫米级形变场,解算出压力、滑觉、纹理及硬度等多维信息。结合“视触觉双模态模型”与模仿学习功能,帕西尼旨在通过海量触觉数据驱动,让机器人真正理解物理世界并具备精细操作能力。
戴盟机器人
戴盟机器人成立于2023年,源自香港科技大学机器人实验室,是全球领先的具身智能全链路解决方案商。核心产品包括全球首款多维高分辨率视触觉传感器DM-Tac W(感知单元达4万个/cm²)、集成毫米级超薄传感器的DM-Hand1灵巧手,以及便携式外骨骼数据采集系统DM-EXton。其方案已在智能制造、实验室自动化等场景批量应用,旨在通过“视触觉一体化”解决机器人灵巧操作的瓶颈。
技术路线:公司核心采用视触觉(Vision-based Tactile)技术路线,通过内置微型摄像头监测柔性材料形变,实现三维力、滑觉及物体纹理的高精度感知。该路径利用自研的单色光感知技术与VTLA(视觉-触觉-语言-动作)大模型,将触觉数据量降至传统方案的千分之一,显著提升了模仿学习的训练效率。相比阻容路线,其优势在于超高的空间分辨率与多模态感知深度,是实现复杂精细操作的前沿方案。
纬创机器人
纬钛机器人成立于 2024 年,起源于美国麻省理工学院(MIT)计算机科学与人工智能实验室(CSAIL),是国内视触觉领域的头部初创企业,发明了全球第一款分辨率超越人类手指的视触觉传感器。
公司核心产品包括GF225系列视触觉传感器,该产品具备10微米级分辨率,1平方厘米可达数万触觉信息点,媲美人手;具备多维力探测,可同时探测法向力和切向力等多维力;可进行柔性物体操作;抗环境干扰强,不易受温度、湿度、电磁场等干扰。2025年公司完成近亿元融资,由小米战投领投。
END
注:本文题图来自freepik、作者自制、AI 生成(微信公众平台AI配图、豆包)、媒体公开资料、皆已授权。
行业社群

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
