
随着具身智能的发展越来越依赖于高质量交互数据,尤其是接触、受力与稳定性等物理层面的信息。
然而,在实际应用中,这类数据长期难以稳定、规模化获取,成为制约机器人精细操作和真实数据采集的重要因素。
在真实操作过程中,机器人不仅需要感知环境,还必须在动作执行阶段判断如何施力、是否稳定、是否发生滑移,这些关键信息主要依赖触觉感知。
压阻式触觉传感器因可靠性高、成本低、易集成,已广泛应用于机器人电子皮肤和数据采集硬件。
此次,「晶智感」中美联合团队从第一性原理出发,借鉴人类皮肤由表皮、真皮及皮下组织构成的复合三维感知结构,设计并实现了仿人类触觉机制的三维架构电子皮肤技术路径。
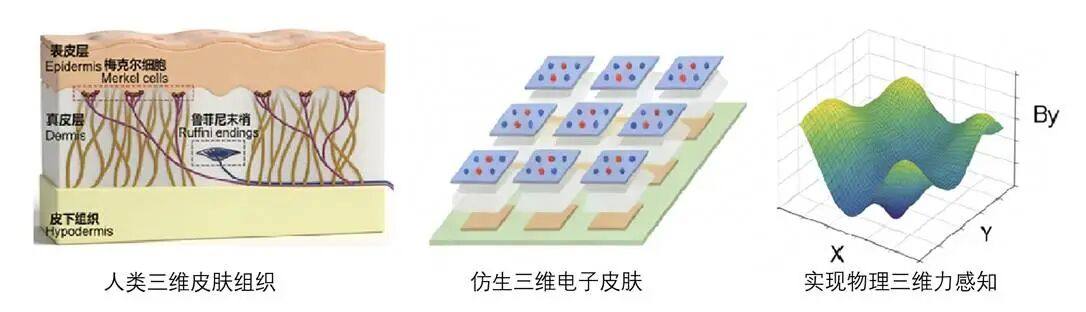
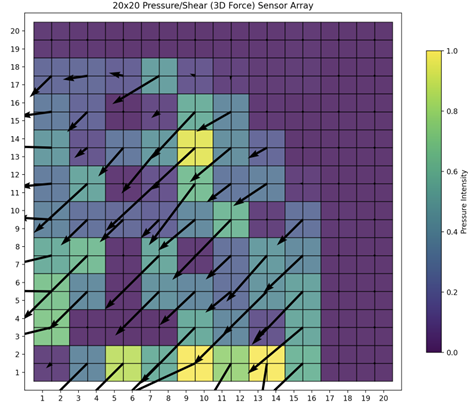
基于该三维架构,「晶智感」在指尖尺度空间内构建高密度三维感知组织,使压阻式传感器能够对法向力与切向力同时产生高分辨率的物理响应,实现切向力的真实物理采集,形成压阻式三维力触觉感知能力,完成该技术路线的重要突破。
这一进展显著增强了三维交互数据的可采集性,使触觉数据从单一压力信号扩展为可描述受力方向、接触稳定性与交互动态状态的三维数据,为操作过程提供更完整的物理约束,也为机器人精细操作与交互能力提升提供了更可靠的数据基础。
目前,该三维力触觉能力已开始应用于柔性电子皮肤与触觉织物手套:
-
在电子皮肤中,用于提升机器人末端执行器对接触状态与抓取过程的感知完整性;
-
在触觉手套中,用于采集人类真实操作过程中的三维交互数据,为高质量操作数据集构建提供基础支持。
在不引入复杂结构与高成本方案的前提下,基于三维架构设计的压阻式三维力触觉路径,为电子皮肤与三维交互数据采集提供了一种低成本、工程可行的实现方式。
-END-
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
