
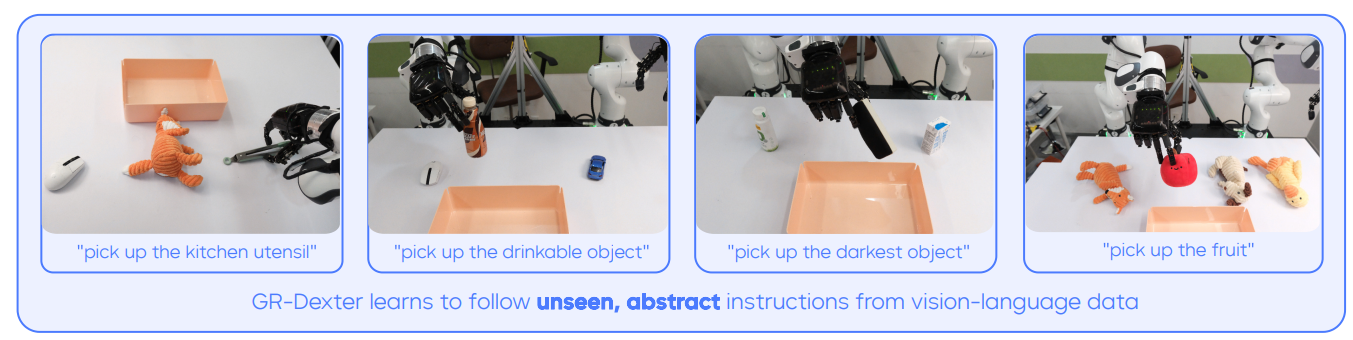
字节跳动Seed团队近期发布的GR-Dexter系统,实现了机器人领域的“圣杯级”突破,全球首个将VLA模型扩展至高自由度灵巧手的一体化框架,成功攻克维度灾难、感知盲区、数据稀缺三大难题。
其核心成果堪称里程碑:56自由度双臂系统(单手21自由度)精准控操,完成吸尘、分面包等长时序任务,面对未知物体与抽象指令仍稳定运行,为通用家务、医疗护理机器人落地奠定基础。
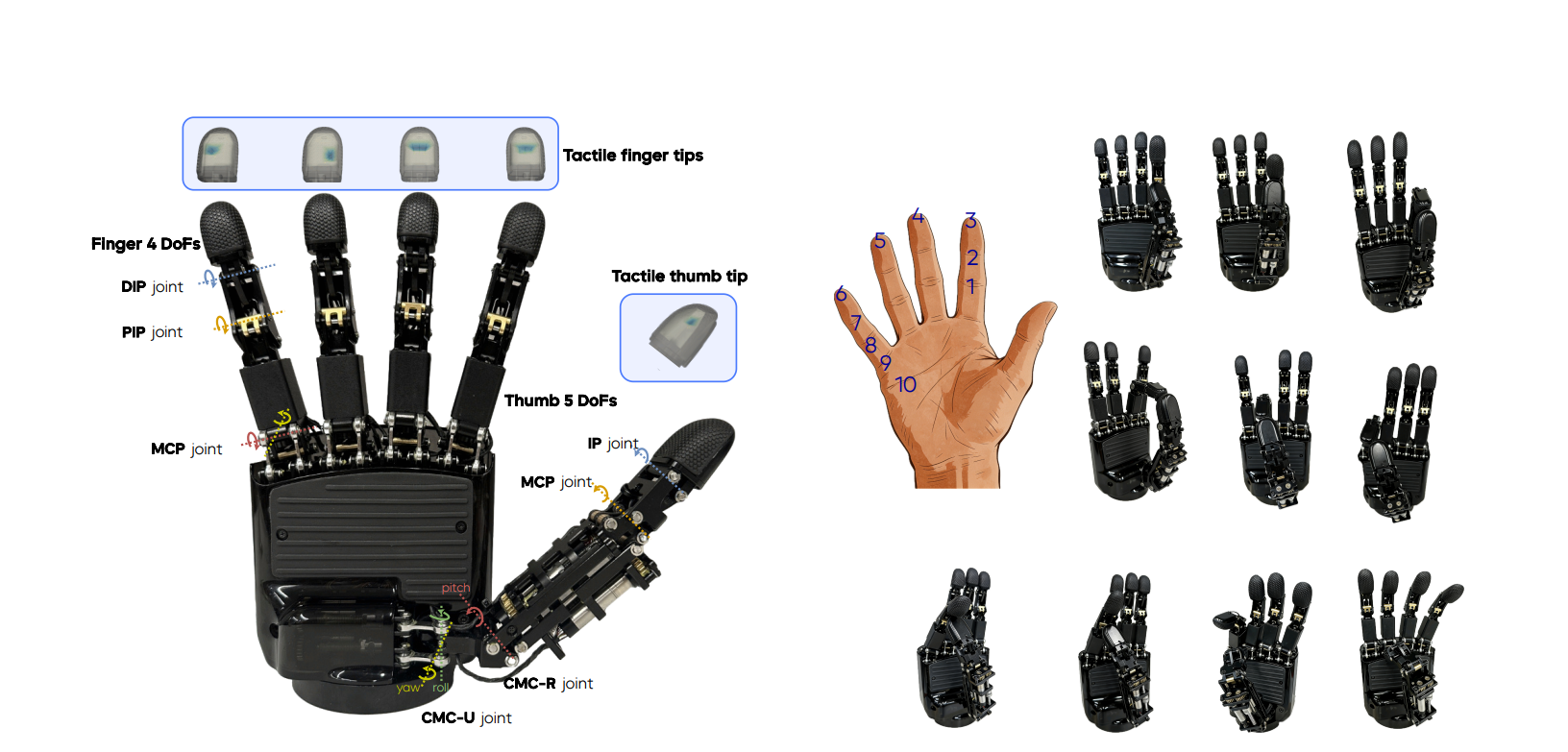
支撑这只灵巧手精准触感的关键正是「晶智感高密度触觉电子皮肤」。
晶智感电子皮肤:灵巧手的“触觉神经”
高自由度灵巧手的类人操作,离不开精准触觉反馈。
「晶智感高密度触觉电子皮肤」,以四大核心优势完美适配需求:
1. 曲面全覆盖:柔性封装技术无缝贴合灵巧手曲面结构,全掌16个关键区域无死角感知,破解手指-物体遮挡导致的感知缺失难题;
2. 超高精度:1g灵敏度超越人类指尖,捕捉亚毫米级位置变化与微小力趋势,让分面包、捏薄纸等精细操作零失误;
3. 宽量程适配:从捏鸡蛋的微力到提重物的大力无缝切换,无需更换传感器即可支撑多样化任务;
4. 低温漂稳定:特殊纳米材料确保温度波动环境下数据可靠,保障开放场景持续精准运行。
全栈协同:触觉技术串联硬件-模型-数据
字节跳动 GR-Dexter 的实践再次印证:
机器人的智能化上限,取决于其感知物理世界的深度。 电子皮肤不再是选配方案,而是通用机器人的“标配神经”。
-
硬件层:为ByteDexter V2灵巧手补上“触觉大脑”,实时反馈抓握力度与接触状态,让灵活关节升级为智能操作体;
-
模型层:触觉数据与视觉、语言形成多模态互补,帮助VLA模型破解高维控制难题,实时调整动作指令,提升控制精度;
-
数据层:输出精细化时序触觉数据,成为“数据金字塔”核心组成,缓解高自由度操作数据稀缺痛点,强化模型泛化能力。

字节 GR-Dexter 的最新突破,标志着机器人正从可执行走向类人化操作,迈出了关键一步。
而在这场变革背后,触觉感知正成为不可或缺的核心能力。作为柔性多模态传感器领域的领导者,「晶智感」持续深耕触觉感知技术,为高自由度灵巧手、工业机器人等多元场景提供关键感知解决方案。通过赋予机器人更真实、更精细的触觉反馈,「晶智感」正加速推动通用机器人时代的到来,让智能机器真正感知世界、理解世界。
-END-
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
