
来源:AI工业(采用 AI 工具整理)


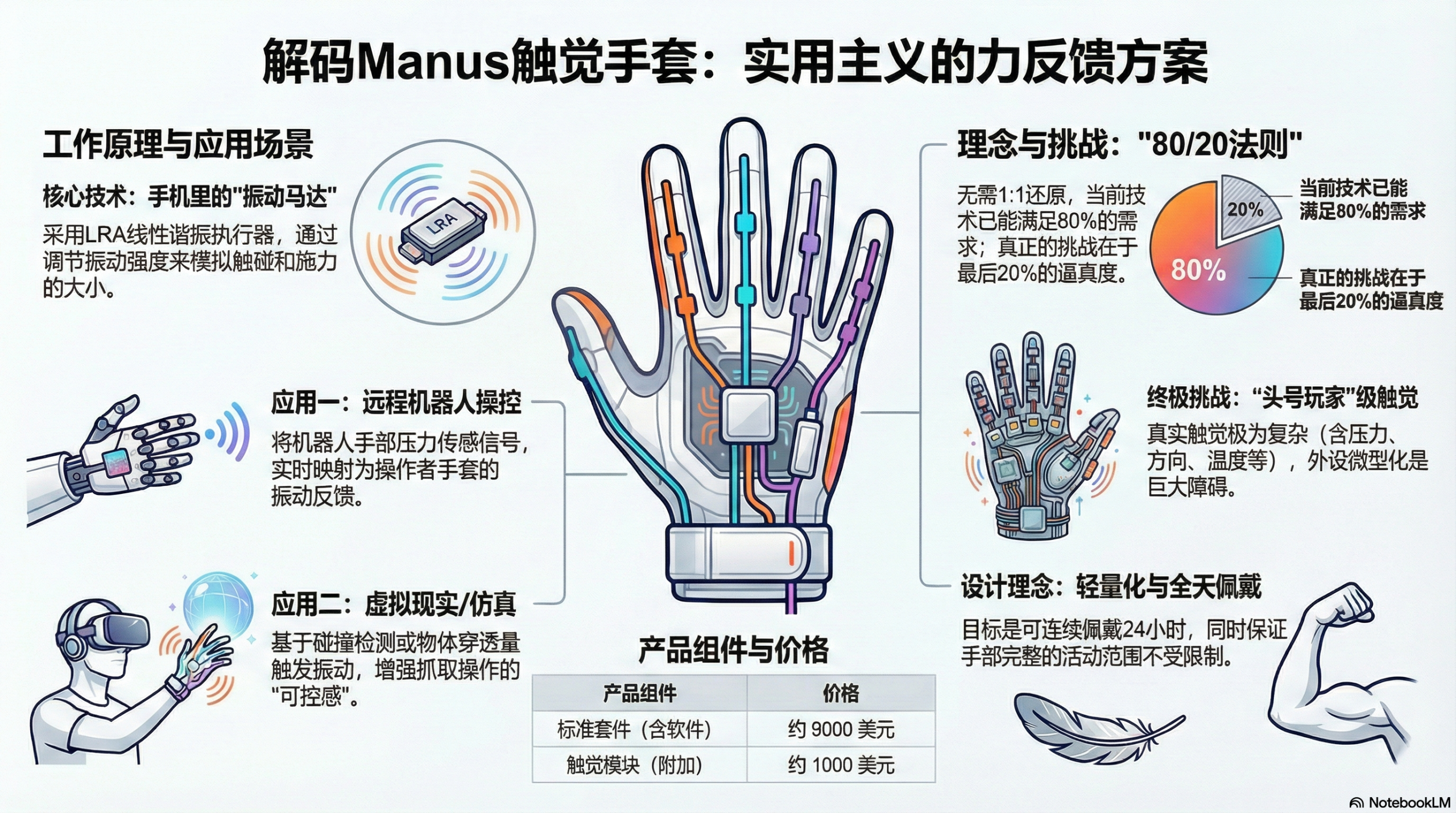
在远程操控(teleoperation)场景中,机器人手部配有压力传感器,系统会将压力传感器的输入映射到手套的触觉输出,使操作者能够“感知”机器人接触与施力的变化。

触觉反馈采用强度调制策略:施力越大,反馈的振动越强,从而形成更直观的力觉提示。

在仿真/VR场景中,触觉也可基于检测生成:例如使用碰撞检测在触碰物体时触发振动;或依据穿透量(interpenetration)与施加的力大小调节反馈强弱,从而增强“触碰—抓取—释放”的操作闭环,接近“虚拟鼠标”式的可控感。
对话指出,《头号玩家》级触觉之所以困难,是因为人手的感觉输入极其丰富:不仅包含压力/力,还包含方向感、防滑感知,并能快速触发“加紧握力/放松”的控制决策。这些感觉信号多在手部内部完成,而外设触觉往往位于手部外部;如果无法做到微型化(micro-level),就会限制活动范围(ROM)。
理想触觉体验还希望同时覆盖热、冷、摩擦、方向、压力等多维度信息,但工程上必须取舍。对话的观点是:若要达到《头号玩家》级别,可能需要类似 Neuralink 的路径,核心是“欺骗大脑”而非仅依赖外设堆叠。
同时,对话也强调,即便仅用“振动马达”的模拟触觉,仍可取得显著效果:无需 1:1 还原也能覆盖大量需求,属于以较低成本获得接近80%效果的方案,而真正困难集中在最后那20%的逼真度提升。
在产品理念上,该公司希望手套可被连续佩戴 24 小时,强调轻量化、不累赘,并保持完整活动范围。

价格方面,一套约 9000 美元(含软件);触觉版本另加约 1000 美元。目前可下单,但预计 近期可发货,以官方页面为准。

相关论文
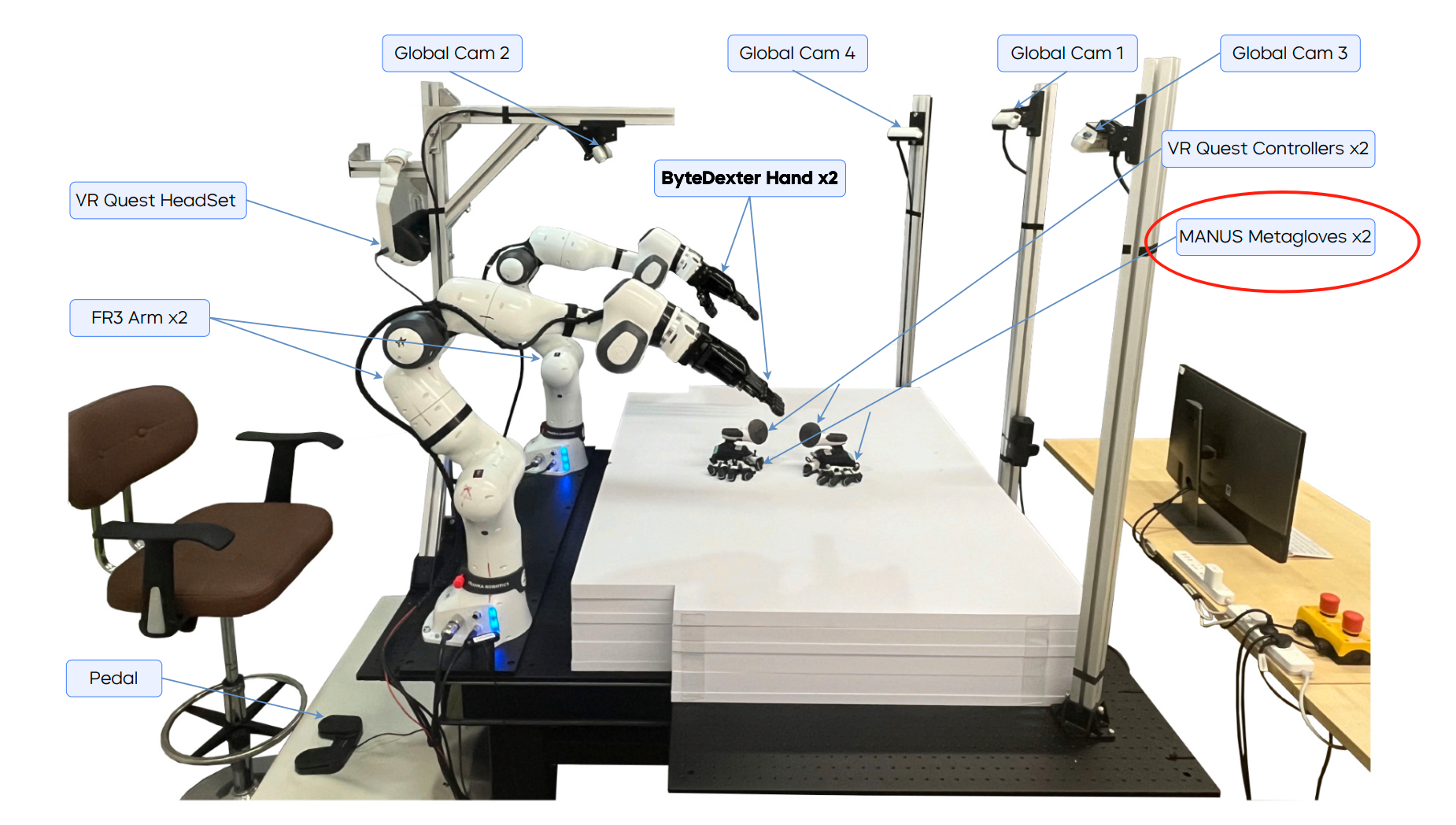
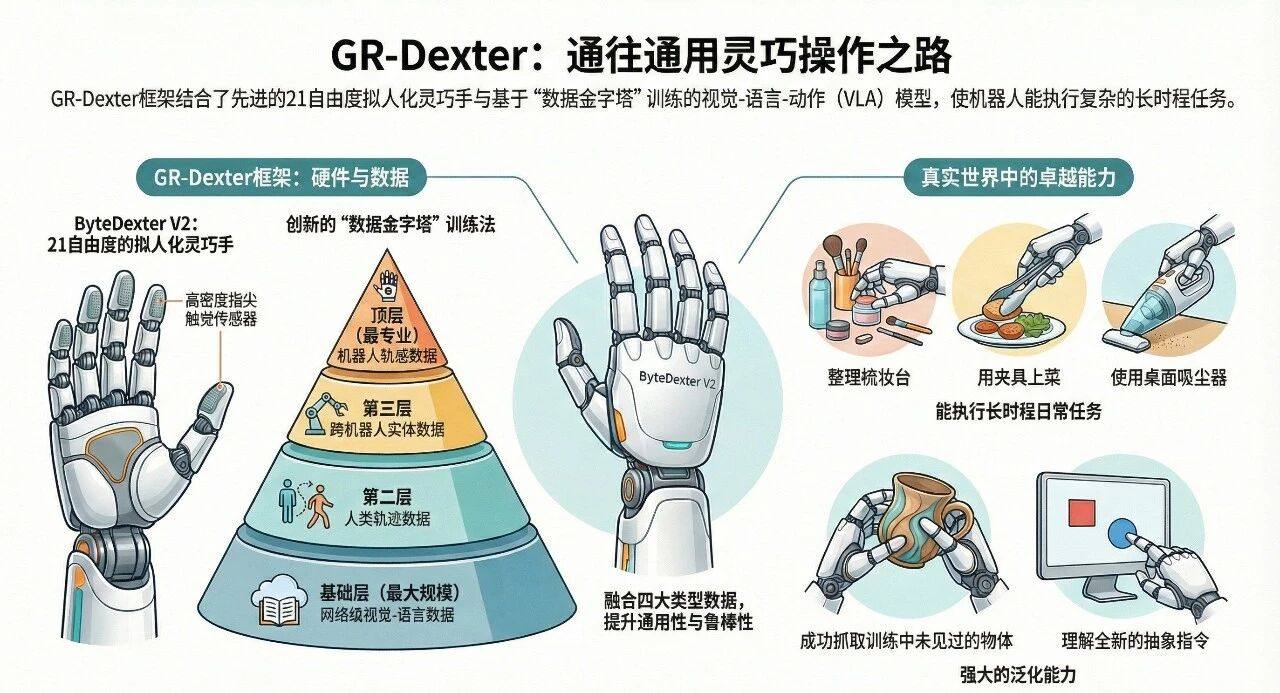
需要说明的是:本文引用该论文,主要用于证明 Manus 手套已进入 VR 远程操控/数据采集链路,并不等同于证明 LRA 振动触觉具备“真实力觉”的量化效果。在 GR-Dexter 的 teleoperation 系统中,Manus Metagloves 与 Quest 负责手部动作采集与映射,形成从人到机器人的数据闭环;而振动触觉更偏向后续的感知增强配置。
来源:AI工业(采用 AI 工具整理)
来源与致谢:本文参考了 https://www.youtube.com/watch?v=ue3PiuNT8d0 如涉及版权或引用问题,请联系处理
👇 扫码加入「AI工业」知识星球,获取更多资料

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
