
-
电阻应变式(Piezoresistive)—— 工业级的基石;通过金属或半导体应变计的几何形变引起电阻变化。物理逻辑:外力导致应变薄膜伸长或缩短。公式:dR / R = K * ε(说明:dR为电阻变化量,R为初始电阻,K为灵敏系数,ε为应变量。) -
电容式(Capacitive)—— 轻触感知的专家;通过改变极板间距 d 引起电容量 C 的变化。微信可用公式:C = ε0 * εr * (A / d)(说明:d 减小导致 C 增大。优点是功耗低、灵敏度高。) -
压电式(Piezoelectric)—— 动态滑觉的神经;利用 PVDF 等材料受压产生电荷的特性,极擅长感知振动。微信可用公式:Q = d_ij * F(说明:产生的电荷量 Q 与力 F 成正比。适合检测物体是否滑落。)
-
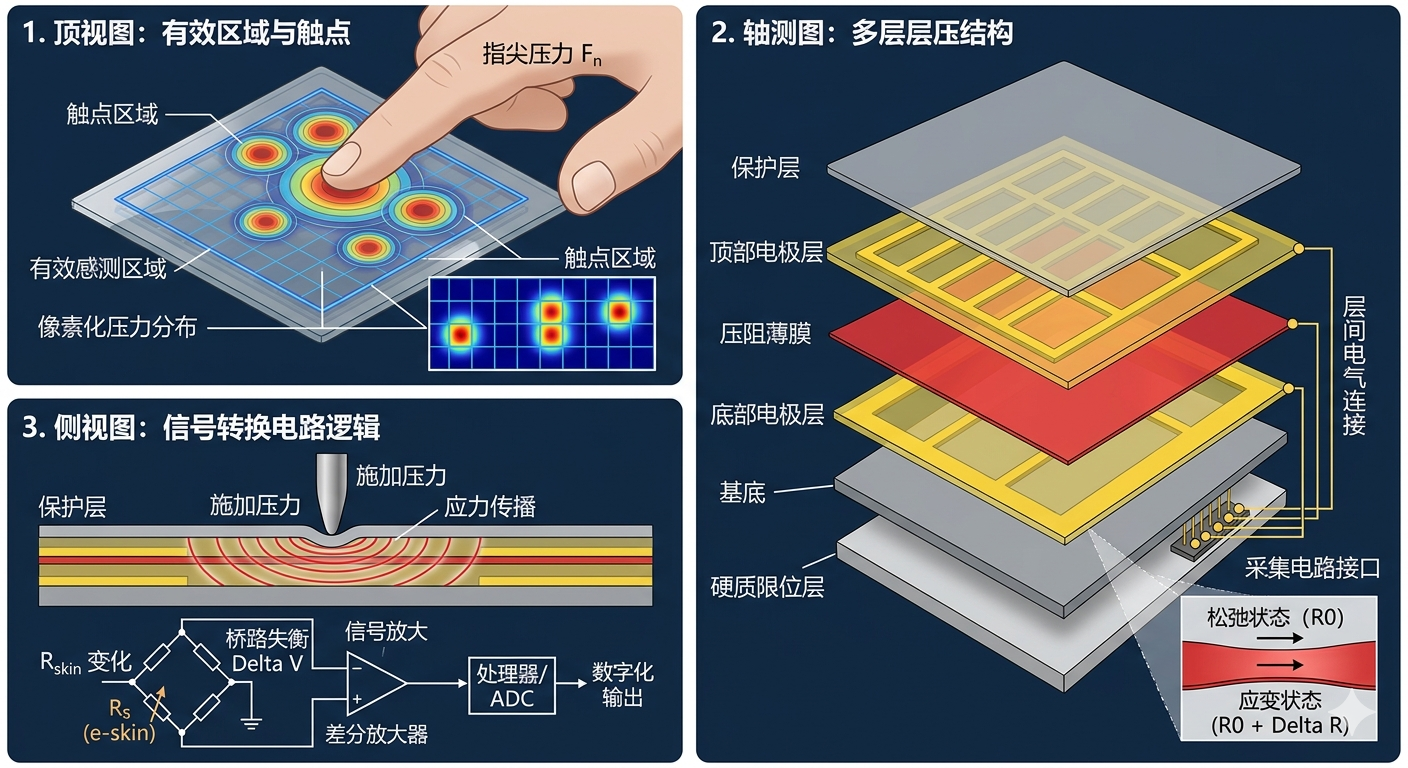
压阻效应与几何形变逻辑;传感器的核心是金属应变计结构。当外部施加压力时,敏感层发生弹性形变: ① 物理过程:受压导致金属栅丝变长、变细,根据电阻定义公式,其阻值会从R0变为R0 + ΔR。 ② 公式:R =ρ * (L / S)(说明:R 为电阻,ρ 为电阻率,L 为长度,S 为横截面积。受压应力导致 L 增加、S 减小,从而使电阻增大。) -
信号转换:惠斯通电桥(Wheatstone Bridge)。由于单次触摸产生的阻值变化(ΔR)极其微小,算法难以直接处理。经典的惠斯通电桥电路(见附录): ① 电桥逻辑:将微小的电阻波动转化为电压差。通过调节固定电阻与应变计电阻(Rsg)的比例,实现信号的高灵敏度捕捉。 ② 公式:V_out = (V_ex / 4) * (dR / R)(说明:V_out 为输出电压,V_ex 为激励电压。输出电压信号与应变程度成正比。) -
信号放大与动态响应;由于电桥输出的原始信号仍处于毫伏级,且易受噪声干扰,架构中引入了电荷放大器: 作用:它不仅负责放大电压,还起到阻抗匹配的作用。配合滤波算法,能有效区分法向力 (Fn) 与 切向力 (Ft) 带来的不同频率特征。
-
多层复合层压结构。电子皮肤通常采用类似于“三明治”的层压设计,每一层都有其特定的功能属性: ① 柔性保护层(Top Layer):通常采用 PDMS(聚二甲基硅氧烷) 或硅橡胶。它决定了皮肤的“触感”,通过调控其杨氏模量,可以改变传感器对轻触或重压的响应敏感度。 ② 电极层(上/下):电极层紧贴应变薄膜。为了保证反复弯曲不失效,常使用银纳米线(AgNWs)或导电织物,以维持大形变下的导电稳定性。 ③ 刚性基底(Base):底层通常选用 PI(聚酰亚胺)薄膜。它为形变提供了稳定的“参考平面”,确保受压时应变薄膜能产生一致性的机械拉伸,而不是无序塌陷。
-
有效感测区域的几何设计。有效感测区域通常采用蛇形排布: ① 设计精要:蛇形布线能在有限的“像素点”内极大增加导线总长度。根据压阻原理,长度越长,形变产生的电阻变化越明显,从而显著提升了信噪比。 ② 阵列式结构:矩阵化布局是实现“全场感知”的关键。通过拨号点寻址技术,系统可以像扫描屏幕像素一样获取压力热力图。 -
维间耦合抑制与过载保护。结构设计通常必须要有两大工程考量: ① 维间解耦:通过电极的对称排布和应变计的方向性,算法可以分离垂直的 Fn 和水平的 Ft(摩擦力),防止抓取物体时出现误判。 ② 硬限位限位:弹性层之间的间隙充当了机械缓冲。当受力超过量程时,基底与保护层发生硬接触,保护脆弱的应变薄膜不被压断。
-
行业三大痛点 ① 迟滞与蠕变:柔性材料的回弹滞后导致动态响应慢。 ② 维间耦合:如何彻底分离挤压力与摩擦力(Fn 与 Ft)。 ③ 布线灾难:大规模像素点(如 16x16 阵列)带来的信号传输带宽压力。 -
全球主要供应商 国际:ATI (美国)、Tekscan (美国)、SynTouch (美国)。 国内:主要关注做触觉传感器的公司。
-
视觉触觉融合(Vision-based Tactile):如 GelSight 技术,利用微型摄像头观察硅胶形变,实现微米级分辨率。 -
边缘AI芯片集成:直接在传感器端通过类脑芯片完成特征识别,降低感知延迟。 -
自修复电子皮肤:开发受损后能自动恢复导电性能的柔性水凝胶材料。
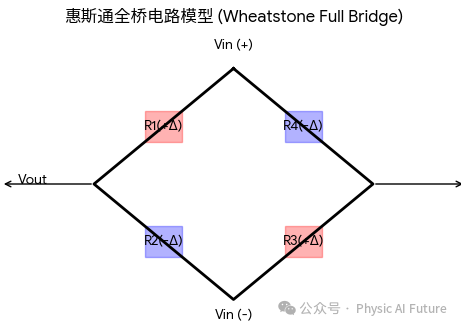
附录:惠斯通全桥电路数学模型推导。
惠斯通电桥的作用是将应变片极微小的电阻变化(ΔR)转化为易于测量的电压信号(Vout)。
-
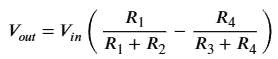
基础输出公式:设输入电压为Vin,电桥由四个电阻R1, R2, R3, R4组成。其输出电压Vout为两个分压支路的电位差:
-
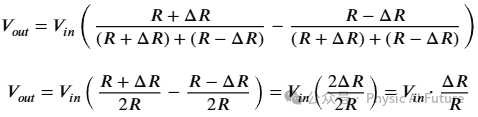
全桥电路的设定:在全桥配置中,我们通常使初始电阻相等(R1 = R2 = R3 = R4)。当受到扭矩时,通过合理的贴片方式,使相邻应变片的变化极性相反:
R1,R3受拉,电阻增加:R + ΔR
R2,R4受压,电阻减少:R - ΔR
-
线性化推导:将上述变化带入基础公式:
-
引入灵敏度系数 K:根据应变效应定义,ΔR/R = K · ε (其中K为应变片灵敏度系数,ε 为机械应变)。则最终数学模型为:Vout = Vin · K · ε。结论:输出电压与应变成正比。全桥电路不仅输出信号大(是半桥的2倍,单片的4倍),且能自动抵消环境温度波动引起的电阻变化(温度补偿)。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
