

当具身智能逐渐从实验室走向产业化,一个关键问题正在被越来越多的人关注:机器人训练所需要的大规模高质量数据究竟从哪里来?
今天,诺亦腾机器人(Noitom Robotics)正式发布 ModalityNet.com 数据平台。平台聚焦以人为中心(Human-centric)的全模态数据(omni-modal data),推出 HiPHI-MOV、HiPHI-OM 和 ITW 三大核心数据集,为机器人企业、具身智能模型研发团队及学术科研领域提供面向下一代具身智能的数据基础设施。
ModalityNet.com 与技术博客文章 "The Art of Modalities in Human-Centric Data" 目前已同步上线。在即将开幕的 ICRA 2026 期间,Noitom Robotics 也将线下现场与全球机器人产业界与学术界见面,集中展示 ModalityNet 的整体数据框架、核心数据集及数据生产能力。
为什么具身智能需要
新的数据基础设施?
如果说大语言模型学习的是人类语言和知识,那么具身智能学习的则是人类与物理世界交互的经验。支撑具身智能发展的数据,不应仅是视频或文本,而需要动作、视觉、力/触觉、深度信息、物体状态、场景结构以及环境上下文等多种信息共同构成的复杂体系。
多年来,具身智能领域一直缺乏足量的高质量数据,尤其是具备物理信息且对齐的数据更为短缺,一定程度上制约着具身智能的发展。
Noitom Robotics 在业界率先提出了面向机器人学习与具身智能研究的四层结构数据金字塔框架。在这一框架中,从第一层到最后一层,数据的具身特异性逐渐降低,而其多样性和对真实物理世界的泛化能力则持续增强。
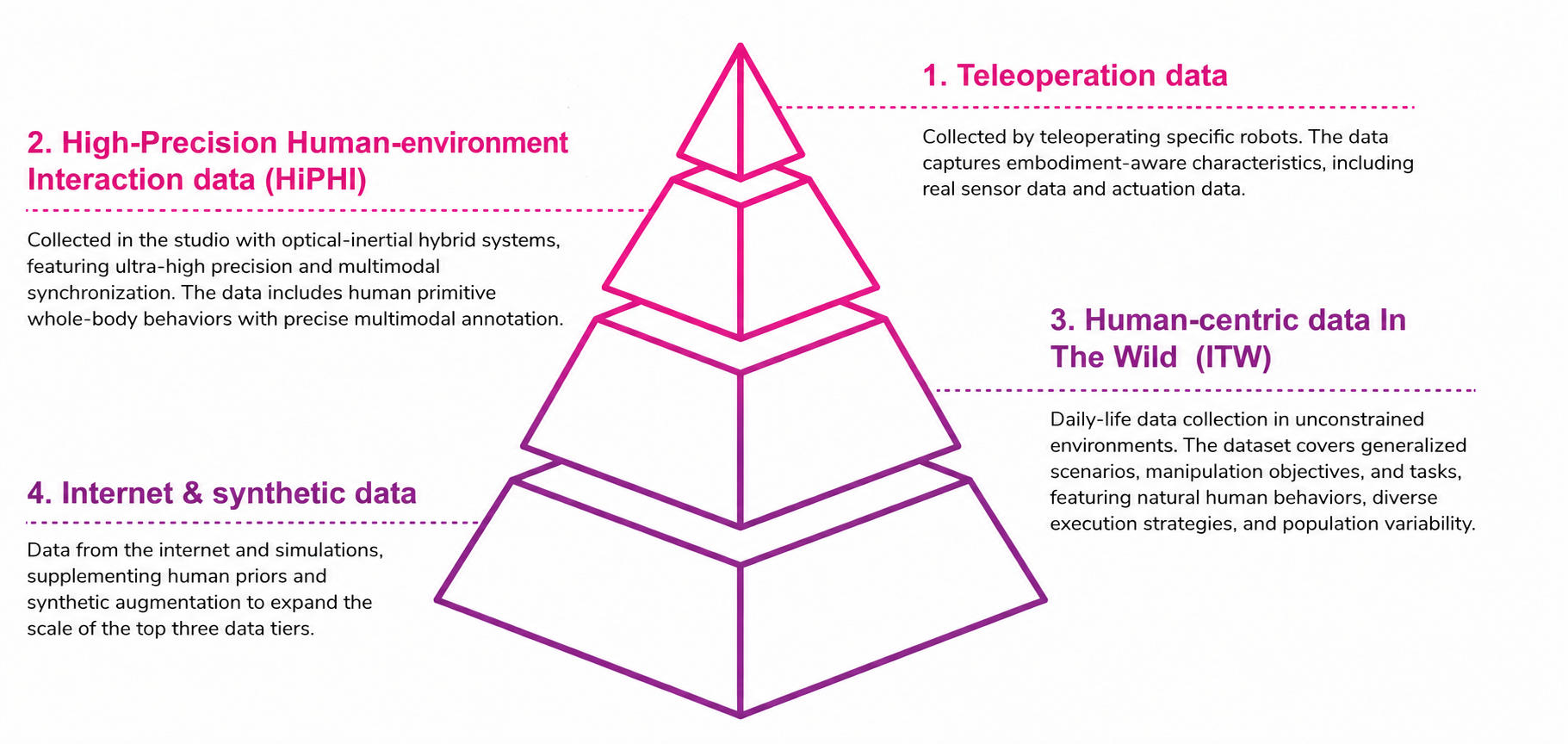
Modality 以此框架为基础准则设计。在与 ModalityNet 同步上线的技术博客(点击文末「阅读原文」访问)中,Noitom Robotics 联合创始人、首席科学家韩磊博士阐述了 ModalityNet 的核心理念:为了弥合顶层与底层数据的巨大差距,ModalityNet 聚焦于以人为中心(Human-Centric)的中间层数据,通过构造同步、多模态、具有物理意义的数据体系,将数据金字塔从顶至底有机连接起来。
三大核心数据集正式发布
预期产能达45万小时级
> HiPHI-OM 全模态
High Precision Human Interaction Omni-Modality
该数据集专为精细的灵巧操作而构建,适用于多模态对齐、模仿操作以及灵巧手的研究。HiPHI-OM 包含人体全身与手部动作、手部触觉感知、精确的物体网格体(MESH)与轨迹追踪,以及第一人称、第三人称的 RGB-D 数据流,其置信度可达「真值」(ground-truth)水平。
一直以来具身行业内缺乏丰富模态、极高精度的精细操作数据集,HiPHI-OM 的出现填补了行业空白。该数据集的规模正逐步按计划向预期的万小时级别扩展,有望助力行业解锁突破性的学术与技术研发成果,让更多科研前沿专家从中受益。
> ITW 自然真实环境人类行为
In-The-Wild
该数据集聚焦于非受控环境下的自然真实环境人类行为数据,包括稀疏节点的人体动作感知、第一人称 RGB-D 视觉、音频以及可选的第三人称 RGB-D 数据等。该数据集旨在将通用的现实世界多样性引入到具身智能训练中,采集有助于泛化性的「长尾」数据,帮助具身智能模型学习受控实验室环境之外的真实物理世界。
根据目前预计,HiPHI-OM 数据可达每年5万小时,HiPHI-MOV数据可达每年10万小时。诺亦腾机器人在数据工厂受控环境之外采集的ITW数据则可达每年30万小时的数据产能。
Noitom Robotics 创始人&CEO 戴若犁博士表示:
“
行业所需要的不仅仅是数据,更是可靠的数据基础设施。需要的是经过验证的采集、校准、质检(QA)、跨本体映射(Cross-Embodiment Mapping)等完整流程,以及真正能够服务于模型训练和机器人学习的数据体系。我们发布 ModalityNet 的目标,是让‘人类与世界交互’的数据变得可规模化生产、可评估、可复用,从而推动整个具身智能生态向前发展。
相约 ICRA 2026
共同探索具身数据未来
本次 ModalityNet 发布恰逢全球机器人领域最具影响力的学术与产业盛会之一 ICRA 2026 召开之际。本届 ICRA 2026 Noitom Robotics 将现场参展,不仅带来ModalityNet 数据框架的展示,更有全新多模态数据采集终端方案等在本次展会中抢先亮相。
活动日期丨6月1日-4日
活动地点丨奥地利维也纳 VIECON
展位编号丨Hall-B 186

诺亦腾机器人(Noitom Robotics)是一家面向具身智能与人形机器人产业的数据企业,致力于构建具身智能的数据基础设施。公司以「数据」为核心交付界面,聚焦为机器人企业及具身智能模型研发团队提供高质量、可规模化的训练数据及相关支撑能力。诺亦腾机器人(Noitom Robotics)不断探索以人为中心的数据路径,系统性提升数据的真实性、泛化能力与长期复用价值。


欢迎长按关注
Website: www.noitomrobotics.com
Email: contact@noitomrobotics.com
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
