
目前,智能机器人主要依靠视觉、激光等感知技术完成与环境的交互,触觉感知能力的缺失限制了这一类机器人的适用范围。尤其是当存在视野盲区或处于非结构化的动态环境下时,机器人便无法完成需要精确操作的任务。触觉感知能力则能够帮助机器人弥补这一短板,大大提高机器人的灵活性,例如通过检测滑动与表面应力,可以帮助操作一些表面光滑或易碎的物体;通过对本体关节张力的感知,可以调节运动过程中的姿势和动作等。
满足要求的触觉传感器是机器人发展中的关键技术之一。触觉传感器用于模仿触觉功能,是机器人直接感知环境作用的重要传感器,能实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测。以下主要介绍智能机器人触觉传感器技术路线、应用现状及投资逻辑。
1、触觉传感器概况
触觉是人与外界环境直接接触时的重要感觉功能,人手触觉信息可感知物体本身性质和接触状态两项信息,其中物体本身性质包含表面纹理、物体形状、软硬程度等信息,接触状态包含法向力、剪切力、相对滑动、物体位姿等信息。通过先进的触觉传感器技术,可以显著提升机器人的触觉感知能力,加速智能机器人应用落地。
触觉传感器的基本原理是将外部压力转化为电信号,以估算和测量法向力(垂直于接触面的法向分量)和剪切力(平行于接触面的切向分量)。
触觉传感器需要考虑多个性能参数,包括精度、灵敏度、探测范围、线性度、响应时间(硬件、软件优化处理数据能力)。
-
触觉传感器需要具备强大的抗干扰能力,以确保其在噪声、电磁干扰或其他外部影响下仍能准确感知和传输数据。
-
精度是指触觉传感器测量结果与实际情况之间的接近程度,高精度的触觉传感器能够提供准确、可靠的触觉信息。
-
检测信息丰富程度:例如电阻式传感器大部分只能检测法向力;电容式通过多个单元组合通过算法可以推导出三维力。

图片来源:网络
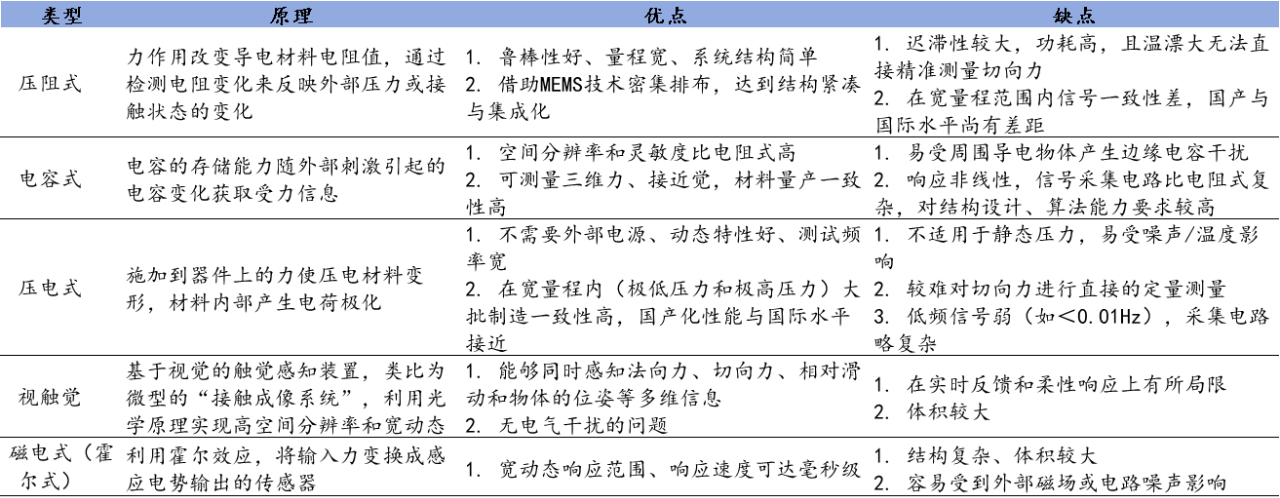
触觉传感器分为分层式触觉传感器和其他触觉传感器两大类别。分层触觉传感器包括压阻式、压电式和电容式传感器,由敏感层、电极层、基地层、封装层、粘合层构成。敏感层位于最上层,由具备力敏响应的功能材料构成(如 PDMS/ 碳纳米管等),基底层采用 PI 或者 Ecoflex 等柔性弹性体,提供整体结构的机械结构支撑和可恢复形变能力。封装层采用 PDMS 薄膜等,用于保护内部电路免受湿度、氧化和污染。其他触觉传感器主要分为视触觉传感器&磁电式触觉传感器。
不同类型触觉传感器各具特点:
-
压阻式通过力的作用改变导电材料电阻值,鲁棒性好、结构简单,但存在迟滞性大、温漂高等问题;
-
电容式通过外部刺激对电容的变化获取信息,分辨率和灵敏度较高,易受干扰且负载能力差;
-
压电式是力的作用产生电荷极化,无需外部电源、动态特性佳,适合动态压力,不适用于静态压力,难测切向力;
-
视触觉则利用光学原理感知多维信息且无电气干扰,但实时反馈和柔性响应有局限,体积较大;
-
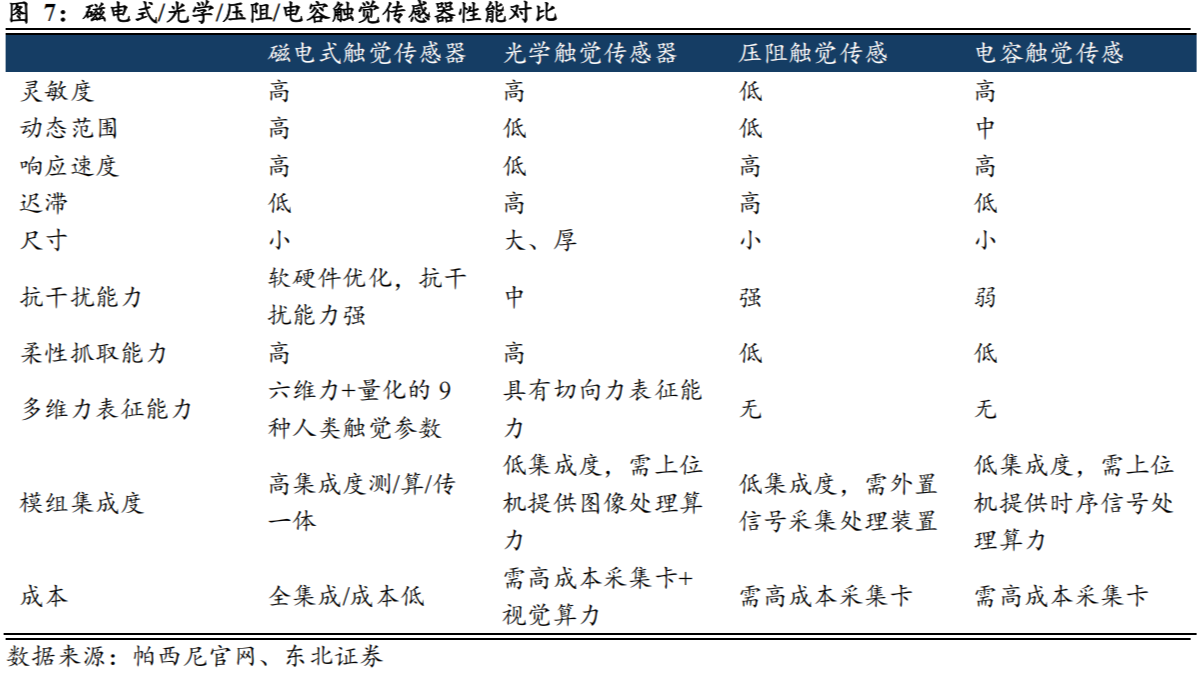
磁电式(霍尔式)将作用力转换为感应电,动态响应范围宽、支持三维力感知,但结构复杂,易受磁场等干扰。
表:各触觉传感器技术方案原理及优缺点
图片来源:开源证券

目前人形机器人触觉传感器技术方案应用情况:
(1)压阻式触觉传感器相对成熟,性价比高,压阻式触觉传感器公司包括福莱新材、能斯达(汉威科技)、墨现科技等,压阻式报价方案分为单指尖报价或者整手报价,单指尖均价在 165-500 元不等,基础款可以采购三个指尖至五个指尖,整手方案为指尖 +其他自由度+手掌,整手方案报价在 1000-2000 元之间。(2)电容式触觉传感器技术较成熟,可检测三维力,分辨率高。核心厂商为他山科技,单手报价在 3000-4000 元。(3)磁电式触觉传感器核心玩家为帕西尼,目标2025年单指尖做到千元以下;(4)视触觉传感器具有接近人手的动态感知与高灵敏度、适配AI 与大模型的图像化数据格式、抗干扰能力强的优势。核心厂商为纬钛科技、戴盟等,目前价格仍较高。
人形机器人触觉传感器技术方案演化:
(1)压电/压阻式性价比高,技术成熟,基础的传感器模块仅可以测量法向力,若测量切向力需要复杂传感器结构采集不同坐标点数据并利用加强算法解藕,预计非精密场景人形机器人灵巧手以及大多数人形机器人手掌/小臂/双足等将首选压电/压阻/电容方案;(2)磁电&视触觉适配高精密场景。磁电式可以直接测量三维力和力矩,但是需要将磁石精准定位到晶格,生产工艺复杂,磁电式成本较高,并且无法适配强磁场环境。视触觉除了六维力之外甚至可以感知纹理/温度等其他物理信息,但算力要求高。
具体技术路线方案详细介绍:
1、压阻式:
-
-
压阻触觉传感器通过感知材料形变所带来的电阻变化来感知力的变化。压阻效应是一种物理过程,当材料受到机械变形时,其电阻发生变化,基于压阻材料的人工触觉传感技术有多种:(1)力敏单元(FSR);(2)压敏导电橡胶;(3)压阻泡沫;(4)压阻织物。
-
压阻式传感器具有结构简单、成本低等特点,但可能由于材料形变恢复不完全,导致重复性误差,另外温湿度变化易引起电阻漂移,需额外补偿算法。凭借其结构简单性与较高的灵敏度,且成本最低,压阻式传感器成为当前主流的传感方案之一。
-
技术路线代表企业:汉威科技、福莱新材、墨现科技。
-
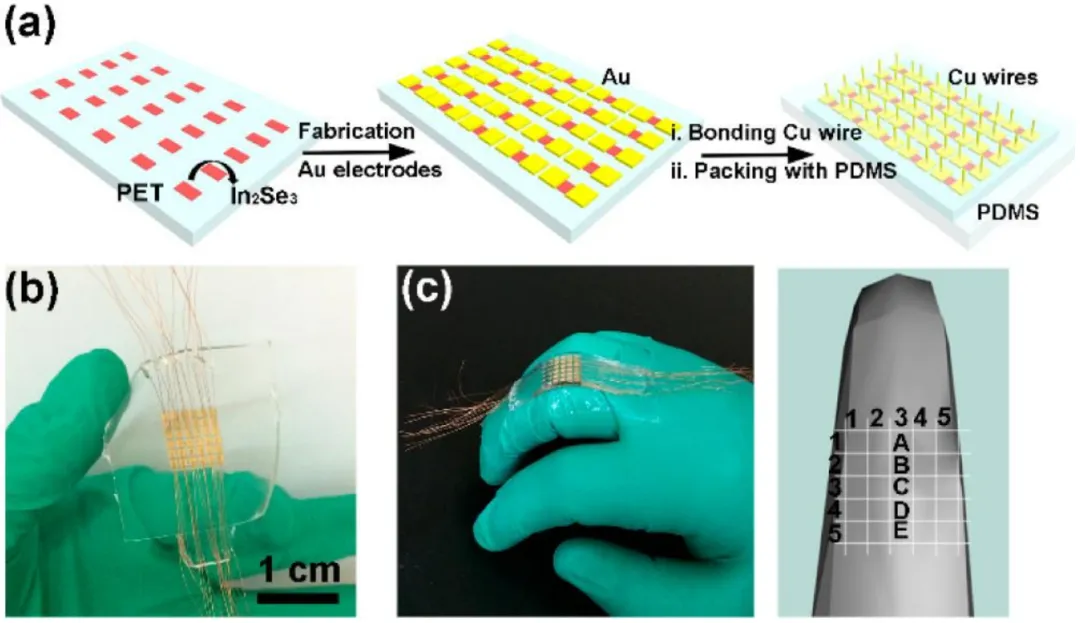
图 :压阻传感器原理、结构
图片来源:网络
2、电容式:
-
-
电容式触觉传感器是基于平行极板电容器的原理,通过外力作用改变两极板之间的相对位置,从而导致两极板之间电容发生变化,进而实现触觉检测功能。响应频率高,压力传感阵列可以通过相互隔离的弹性电介质材料将行和列电极重叠构造而成。通过使用更可压缩的弹性材料或较薄的传感器,可以提高对小力的灵敏度。
-
电容式具有结构简单、功耗低、温度独立性等优点。但因非常容易受到电磁干扰的影响,并且需要复杂的测量电路,对算法要求较高。国内部分企业通过结构以及算法优化干扰问题。
- 电容方案可以实现三维力检测,除了可以测量法向力外,通过使用嵌入的多个电容器,传感器还可以计算剪切力。
具体技术方案:基础的分层式触觉传感器往往测量单一法向力为主,但是通过叠加触头和增强算法可以实现对于切向力的感知和测量。比如 4 个椭球曲面电极组成 2×2 的阵列且与触头底部的公共电极分别形成 4 个呈不同方向分布的独立电容,通过传感器触头受到法向力作用而得出的 4 个电容值,反推施加的三维力的大小和方向。
-
技术代表企业:他山科技、哈普泰克、猿声科技等。
-

图 他山科技多功能层专利技术
图片来源:他山科技官网
3、压电式:
-
-
压电式触觉传感器具有很高的固定频率,适合动态测量。在外部压力作用下,压电材料产生个电荷,当外力变化时,压电材料表合动态测量面的电荷随之变化,带来输出电压信号的变化。压电效应为晶体材料在受力/压力引起的形变下产生电荷的现象。压电式触觉传感器使用的压电材料分为无机材料、有机材料和复合材料,无机压电材料一般采用锆钛酸铅(PZT)、钛酸钡(BaTiO3)、钛酸铅(PbTiO3)和铌酸锂(LiNbO3)等,有机材料采用聚偏二氟乙烯(PVDF)和聚二甲基硅氧烷(PDMS)等。
-
业界玩家偏向于用压电式来做大面积电子皮肤,做指尖触检测的较少。
-
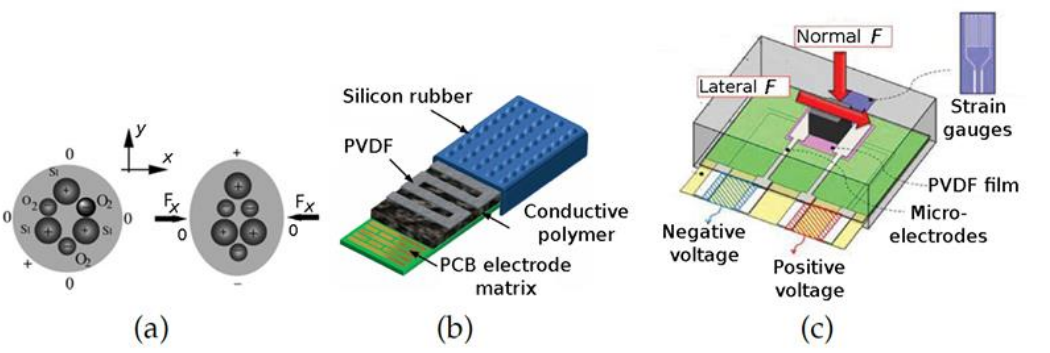
图 压电式传感器技术原理
图片来源:网络
4、电磁式:
-
-
霍尔效应式传感器通常由三个主要部分构成:导电材料、磁场源和霍尔探测电路。当外界的压力或力作用于传感器时,磁场源和导电材料之间的相对位置发生变化,导致霍尔电压的变化。传感器通过精确测量这种电压变化,从而获得触摸、压力或变形等信息。
-
电磁式传感器具有高精度、稳定性强、耐久性等特点,但由于需要配合磁场源使用,存在成本较高、设计复杂等不足,目前主要应用于机器人触觉感知、智能穿戴设备、医疗监测等领域。
-
技术路线代表企业:帕西尼。
-

图 电磁式传感器技术原理
图片来源:网络
5、视触觉:
(1)、视触觉技术是一种融合光学成像与触觉感知的传感方法,其核心原理是通过捕捉弹性材料与物体接触时的微观形变,将其转化为高分辨率触觉信息。视触觉传感器的原理是用摄像头拍下弹性材料接触物体时的细微形变,再把这些变化转化成高清的“触觉照片”,通过摄像头观察柔软层的形变来“感受力量、纹理和滑动”。与传统按压传感器不同,触觉传感器能同时“感受”物体的软硬、纹理甚至滑动趋势。这种高保真的触觉信息,能帮机器人更精准地“理解”物体特性,像人类一样完成精细操作。
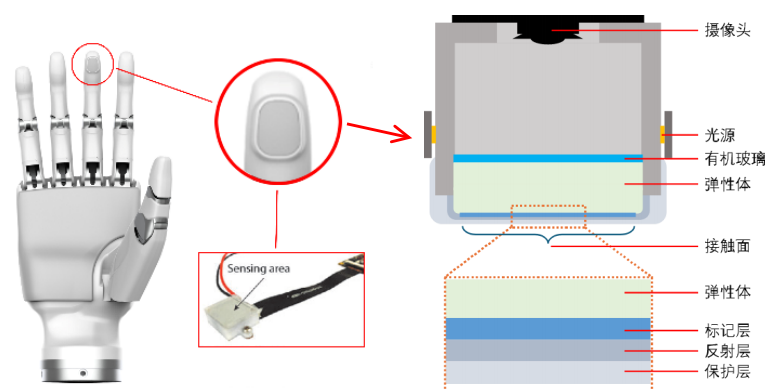
图 视触觉传感器技术原理
(2)、视触觉传感器属于比较新型的技术方案,与其他方案相比,视触觉传感器方案具有接近人手的动态感知与高灵敏度、适配 AI 与大模型的图像化数据格式、抗干扰能力强的显著优势。
-
高维感知能力:视触觉可同时感知法向力、剪切力、相对滑动、物体位姿、 纹理、软硬度等信息,接近人手触觉维度,为机器人提供更丰富的环境交互信息, 是理解和操作物理世界的重要一环。
-
VLM 大模型适配性:视触觉输出为图像形式,与视觉数据高度一致,可直接接入视觉-语言-动作(VLA)大模型,天然适配其端到端架构。
-
抗干扰能力强:光学信号不易受温度、磁场、电磁干扰影响,可在高低温(冶金、低温仓储)、电磁干扰(焊接、电机装配、核电站)、动态作业(工厂流水线)等环境中稳定工作。
(3)、视触觉传感器也存在一些局限,包括体积大且集成难度高、柔性材料易损耗影响性能与寿命、对算力要求较高等缺点:
-
-
体积大和集成难度高:视触觉传感器通常需要内置摄像头、照明装置、光学路径和软弹性触感材料,使得整体结构厚重、占空间。优化方向包括微型光学系统(小型高清摄像头、微型镜头和低功耗光源)、集成化柔性材料与传感器结构(优化柔性触觉层的厚度和折射率)及算法补偿(更小的成像区域实现高精度触觉),解决视触觉传感器的体积大的问题,从而更容易集成到多关节机器人和灵巧手末端。
-
柔性材料:柔性材料是视触觉传感器的核心技术之一,直接决定了触觉传感器的敏感性、分辨率、响应速度以及寿命。柔性凝胶或触摸膜易受磨损、污染或老化影响,长期使用可能导致成像质量下降,进而影响触觉图像的准确性与传感器寿命。优化方向包括开发耐磨、耐污染、弹性可控的复合柔性材料,如在凝胶中添加微粒或纳米材料,提升耐用性和灵敏度。
-
算力要求较高:输出图像信号信息量大,图像处理和触觉重建需要高算力支持。
-
(4)、技术路线代表企业:追溯视触觉传感技术的发展,最早由东京大学研究团队在于2004年提出,2009 年经MIT CSAIL的 Edward Adelson教授团队持续迭代发扬光大。Edward Adelson教授团队此后成立Gelsight公司将VBTS产业化,目前 GelSight已成为全球视触觉传感器龙头。纬钛机器人创始人师从GelSight创立者Edward Adelson教授,延续前沿技术脉络; 戴盟机器人孵化于香港科技大学科研团队,叠动科技融合MEMS工艺与视触觉技术,千觉机器人、智元机器人、帕西尼等则通过自主研发,从多维触觉、全栈系统等方向切入新赛道。

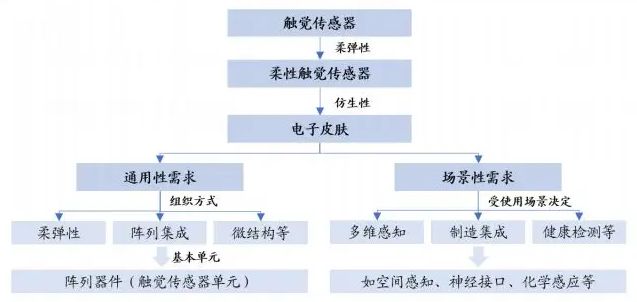
2、电子皮肤概况
电子皮肤(E-skin)是一种仿生柔性传感器系统,通过集成压力、温度、触觉等多模态传感器,模拟人类皮肤的感知功能,实时捕捉外部环境中的关键物理信号,包括压力(如触碰、挤压、轻按)、温度、触觉纹理,部分产品还可感知湿度、应变(如拉伸、弯曲)等,实现对外部环境的实时监测与交互。

电子皮肤定义为仿生柔性传感器系统,与狭义触觉传感器相比,电子皮肤具备柔性、大面积、多类型感知特点。
电子皮肤除了对温度、法向力、剪切力实现精确、无迟滞的检测,还朝着多模态感知、自愈能力、柔性大面积覆盖等方向持续演进,目标是更贴近人类皮肤,实现复杂场景下的人机交互与感知反馈。然而,要实现真正的规模化应用,电子皮肤仍面临多重技术壁垒。
-
材料层面需在灵敏度、柔韧性、弹性、透气性和生物相容性等多个维度达到平衡,开发可适应复杂环境的高性能材料仍具挑战;
-
制造层面存在工艺复杂、成本高昂等问题,目前电子皮肤制作往往依赖新材料和精密加工,尚难实现低成本、稳定的大规模量产。
-
随着感知维度的提升,算法层面的计算压力也日益突出。柔性传感器产生的多模态信号需由机器人视知觉系统与“大脑”实时协同处理,如何通过分布式架构与边缘计算降低延迟、缓解中央计算负载,也成为决定应用落地效率的关键一环。
电子皮肤演进路线:
在当前阶段,行业处于将触觉传感器推广应用在灵巧手指尖与指腹阶段,渗透率仍较低。多类型电子皮肤目前在机器人应用仍较早,在柔性材料、传感器节奏、生产工艺上仍需要技术攻关。

3、触觉传感器&电子皮肤应用场景
触觉压力传感器,在消费电子、智慧家居、汽车智能座舱、医疗等领域已有成熟应用,在对精度要求较低的场景主要是压阻、压容路线,在对精度要求高的场景主要是视触觉路线。
目前消费电子、医疗是主要应用场景,机器人应用是重点潜力市场。医疗领域用于心率、血压、血糖、假肢感知等功能。消费电子则集成于VR/XR设备、手机、智能穿戴产品中提升交互体验。
电子皮肤在人形机器人中,除手指部位外,人形机器人的其他触碰外界物体的部分均有应用潜力。手之所以作为最前端的交互,是因为在日常生活中,指尖是机器人与外界进行交互过程中对精细化操作频率的要求最高的部位。除了手指尖部位,机器人的脚尖、肩膀、膝盖、臀部、后背等能触碰到外界物体的部位均有可能用到电子皮肤。
预计触觉传感器、电子皮肤在人形机器人的应用根据功能重要性和交互频率有明显的优先级。
-
手部是最高优先级,应用部位:1)指尖和指腹是机器人与物体交互最核心的区域。2)手掌: 用于大面积接触、稳定抓握和感知物体形态。实现精细操控:
-
-
力感知: 知道抓握一个鸡蛋、一个易拉罐和一个铁块需要用多大的力,防止捏碎或滑落。这是实现力控抓取的基础。
-
滑觉感知 :当物体开始从手中滑落时,皮肤能感知到微小的振动和剪切力变化,从而让机器人能动态调整握力,这是稳定抓握动态物体的关键。
-
纹理/材质感知: 通过高频振动和热传导感知,可以分辨物体是木头、金属还是布料,从而调用不同的交互策略。
-
-
手臂&躯干,次高优先级。应用部位包含前臂、手肘、肩膀,这些部位在运动和交互中极易与环境或人发生碰撞。解决安全交互 、碰撞检测问题。
-
脚底&腿部,次高优先级。应用部位包含1)脚底: 用于感知与地面的交互,增强平衡与步态控制。2)小腿和膝盖:用于在复杂地形(如草地、瓦砾)中移动时的低矮障碍物感知。
-
面部&头部,未来发展方向。应用部位包含脸颊、嘴唇周围,用于高级人机情感交互。

触觉传感器、电子皮肤在人形机器人上的应用路径:最初从手开始,解决核心的操作和抓取问题。最开始是指尖、指腹应用。随着柔性电子皮肤材料&工艺成熟以及成本逐步可控,扩展到身体,解决与人与环境交互的安全问题,是进入开放场景安全的需要。
4、触觉传感器&电子皮肤市场空间
消费电子、智慧家居、汽车、医疗触觉传感器一年市场规模预计有小几十亿元的市场空间。
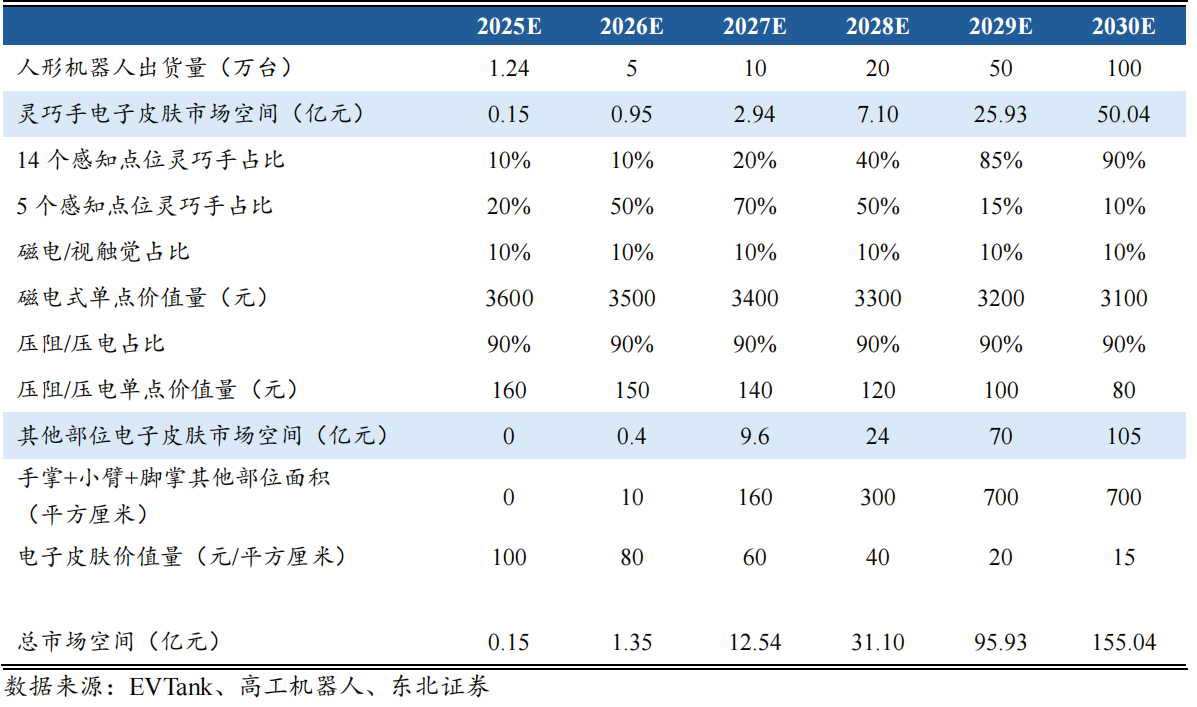
机器人市场方面,根据高工产业研究院,2025 年全球人形机器人市场销量有望达到 1.24 万台,市场规模 63.39 亿元,结合 EVTank 预测以及特斯拉此前指引,东北证券测算 2030 年全球人形机器人市场销量有望达到 100 万台,2025-2030CAGR 达到 140%。
触觉传感器为人形机器人感知端的核心,灵巧手指尖触觉传感器有望率先导入,伴随技术走向成熟以及成本下降,预计灵巧手电子皮肤触点有望从五个指尖转向手掌+指腹全覆盖,参考东北证券测算数据,预计2025-2026年灵巧手触觉传感器市场空间约为3-5亿元,2030 年有望达到 50 亿元。
目前手臂/双腿/脚掌等其他部位电子皮肤尚未覆盖,成本下降后电子皮肤应用范围有望进一步提升,东北证券测算 2030 年人形机器人电子皮肤(包含触觉传感器)总体市场空间有望达到 155 亿元。
5、触觉传感器&电子皮肤竞争格局
压阻、压容路线比较成熟,主要以汉威、他山、墨现为代表。国内最近几年的新技术创业方向重点在视触觉方向,或者触觉+视觉融合路线,包括帕西尼、纬钛机器人、戴盟、叠动等。做视触觉的厂商,除了做传感器硬件,仍会往操控数据、操作算法模型布局,甚至往下游灵巧手、整机去布局。
另外一个创业方向为大面积的柔性电子皮肤,这个方向涉及材料、工艺,主要以一些高校团队创业为主,例如赛感科技、途见科技等。
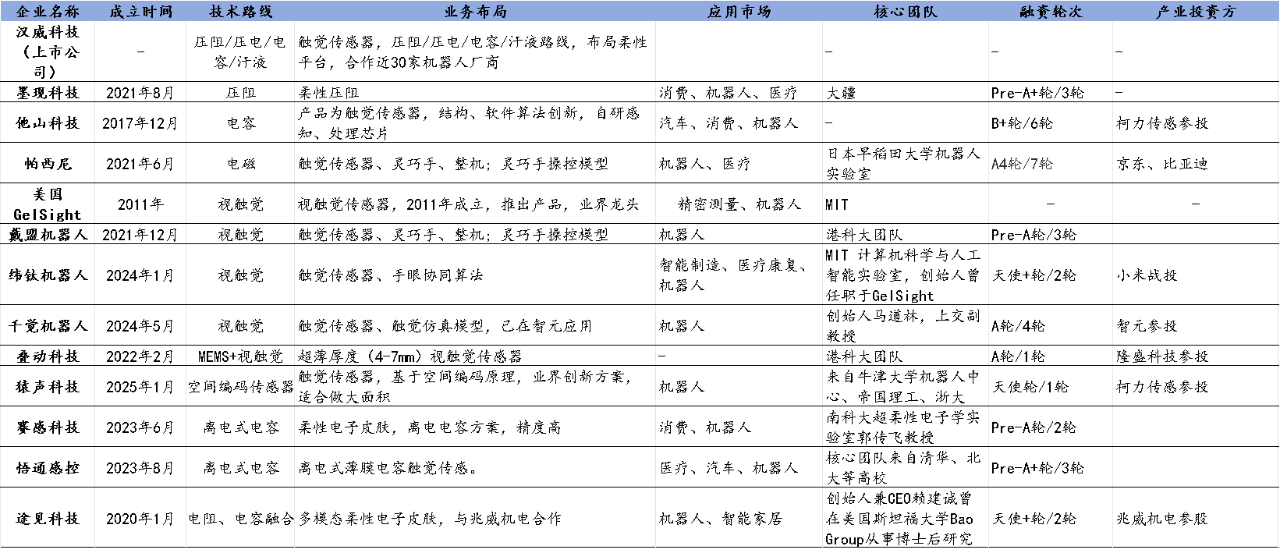
图片来源:基于调研、公开信息整理
6、触觉传感器&电子皮肤投资逻辑总结
触觉传感器&电子皮肤是人形机器人实现精细操控的关键零部件之一。触觉传感器技术方案多样,各有优缺点。目前人形机器人触觉传感器技术方案应用情况:(1)压阻式触觉传感器相对成熟,性价比高,压阻式触觉传感器代表公司包括能斯达(汉威科技)、墨现科技等,压阻式报价方案分为单指尖报价或者整手报价,单指尖均价在 165-500 元不等,整手方案报价在 1000-2000 元之间。(2)电容式触觉传感器技术较成熟,可检测三维力,分辨率较高。代表厂商为他山科技,单手报价在 3000-4000 元。(3)磁电式触觉传感器核心玩家为帕西尼,目标2025年单指尖做到千元以下;(4)视触觉传感器具有接近人手的动态感知与高灵敏度、适配AI 与大模型的图像化数据格式、抗干扰能力强的优势。代表厂商为纬钛科技、戴盟等,目前价格仍较高。重点关注赛道各厂商的工程落地能力、生态位。全身电子皮肤方向,市场上陆续有创新技术路线企业创业,重点关注可做大尺寸、量产性高的技术方案进展。
人形机器人触觉传感器技术方案演化:(1)压容/压阻式性价比高,技术成熟,基础的传感器模块仅可以测量法向力,若测量切向力需要复杂传感器结构采集不同坐标点数据并利用加强算法解藕,预计非精密场景人形机器人灵巧手以及大多数人形机器人手掌/小臂/双足等将首选压电/压阻/电容方案;(2)磁电&视触觉适配高精密场景。磁电式可以直接测量三维力和力矩,但是需要将磁石精准定位到晶格,生产工艺复杂,磁电式成本较高,并且无法适配强磁场环境。视触觉除了六维力之外甚至可以感知纹理/温度等其他物理信息,但算力要求高。
预计未来数年以上两大类技术路线都会存在,压容/压阻技术相对成熟,除了机器人之外之前已有应用市场,重点关注压容/压阻领域有较多应用市场,人形机器人领域客户覆盖度高的头部厂商;以及视触觉领域的投资机会,视触觉传感器厂商从逻辑上会往下游操控数据&模型延伸,想象空间会更大。
参考资料:
1、产业研究 |柔性触觉传感器的主要技术路线与前沿趋势
2、开源证券-视触觉传感:特斯拉灵巧手“最后一块拼图”
3、东北证券-机械设备行业:电子皮肤百亿市场,算法+工艺+渠道构造壁垒
4、中泰证券-汽车行业深度:人形机器人感知能力的关键,电子皮肤升级竞赛主战场之一
5、梳理国内20家柔性压力传感器制造商:核心团队、技术路线、技术优势、核心产品、融资情况
https://mp.weixin.qq.com/s/fkGcxWz6BT4L933-mlKiRQ?scene=1
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
