
随着传感技术与各种柔性材料的快速发展与创新,柔性三维力传感器领域正受到越来越广泛的关注。柔性三维力传感器种类繁多,其中电容式柔性三维力传感器因具备灵敏度高、测量范围大、结构简单、迟滞小等优势,在柔性三维力传感器的研究中备受青睐。
据麦姆斯咨询报道,吉林师范大学研究团队设计并制作了一种可以实现法向力与切向力检测的电容式柔性三维力传感器,相比已知的大部分柔性传感器来说,该传感器拥有更短的响应时间,在0 ~ 3 N范围内拥有更高的灵敏度,利用空气作为极板间介电层降低了制作成本,并简化了传感器结构,为柔性三维力传感器提供了一种新的设计方案。相关研究成果以“电容式三维力柔性触觉传感器设计与应用研究”为题发表在《吉林师范大学学报》期刊上。
这项研究所提出的电容式柔性三维力传感器的传感单元主要由五部分组成,包括触头、上基板、上电极、下电极和硅胶腔体。为了实现传感器的全柔性,传感器的基体部分和电极部分均由柔性材料制作而成。研究人员使用COMSOL有限元仿真软件对该传感器进行了法向力与切向力仿真,验证了传感器结构的可行性。
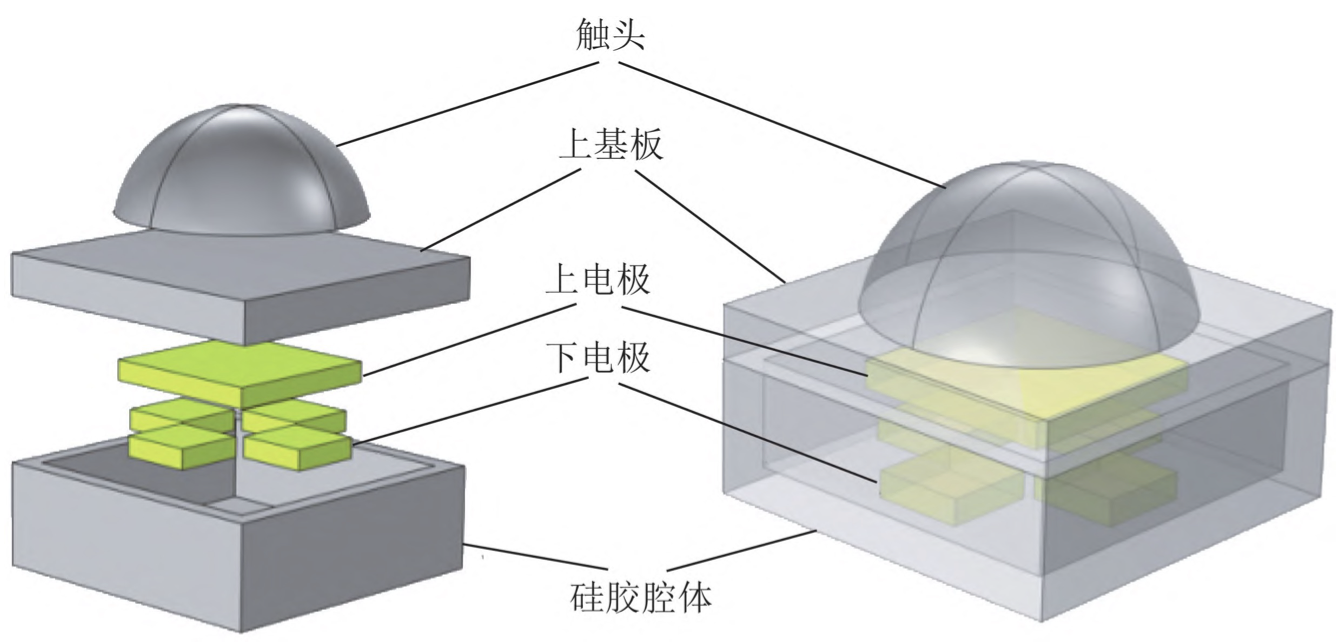
图1 电容式柔性三维力传感器结构示意图
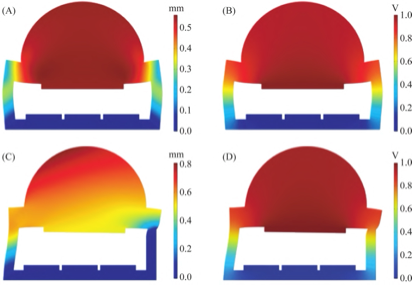
图2 电容式柔性三维力传感器受法向力、切向力的仿真示意图
该电容式柔性三维力传感器的基体部分均采用硅胶材质制成,此材料不能直接用于3D打印,需先利用COMSOL或SOLIDWRKS等绘图软件绘制出需要打印的模具零件图,再利用3D打印机将这些模具打印出来,这项研究采用的3D打印材料为ABS工程塑料。模具打印完成之后,将硅胶注入模具之中,待硅胶固化后即可脱模成为该传感器的各部分柔性基体,最后再将这些制作完成的传感器部件用硅胶黏在一起即可。
图3 电容式柔性三维力传感器实物图
该电容式柔性三维力传感器的电极部分可等效为4个电容器,响应时间最低可达12.5 ms,法向力0 ~ 3 N检测范围内的灵敏度为1.036 N⁻¹,切向力0 ~ 3 N范围内的灵敏度为0.446 N⁻¹,最小检测下限为0.1 N,力分辨率为0.1 N。此外,该传感器最大迟滞约为3.73%,在100次循环之后电容的相对变化曲线依旧十分稳定,拥有良好的重复性,且传感器受温度影响较低,对温度响应的灵敏度为-0.001099℃⁻¹。
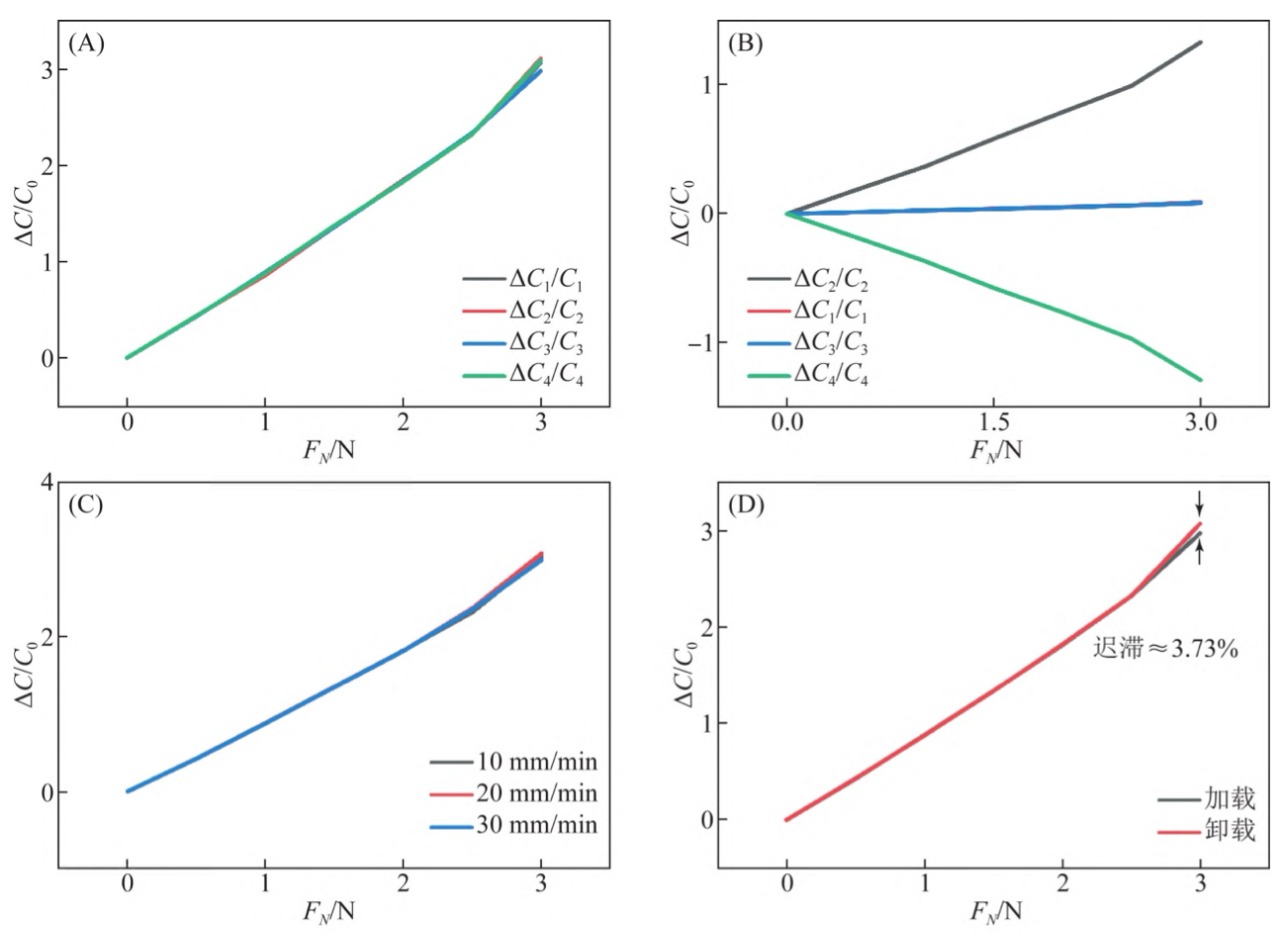
图4 电容式柔性三维力传感器受法向力、切向力时的电容变化、频率特性及迟滞
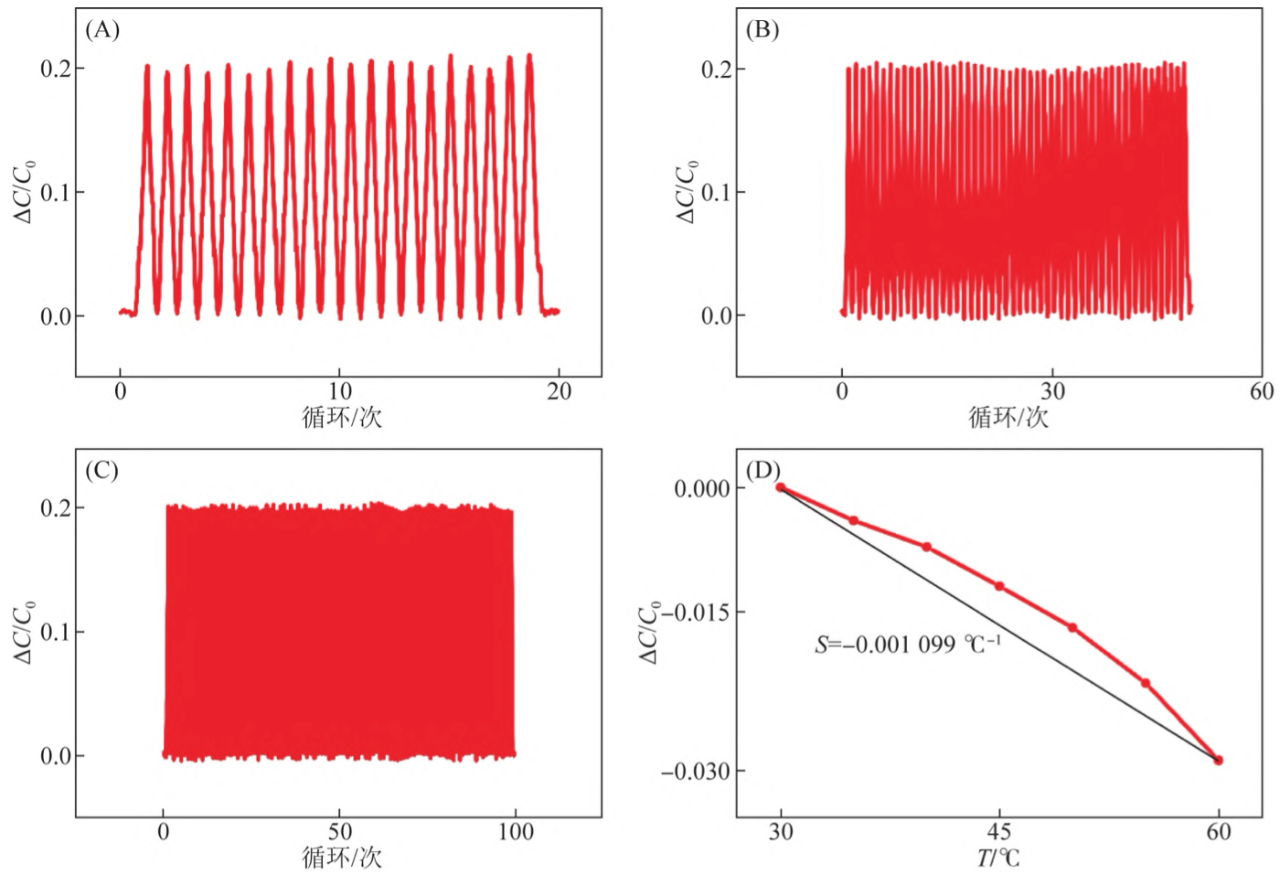
图5 电容式柔性三维力传感器在20次、50次、100次循环下的重复性及不同温度下电容的相对变化曲线
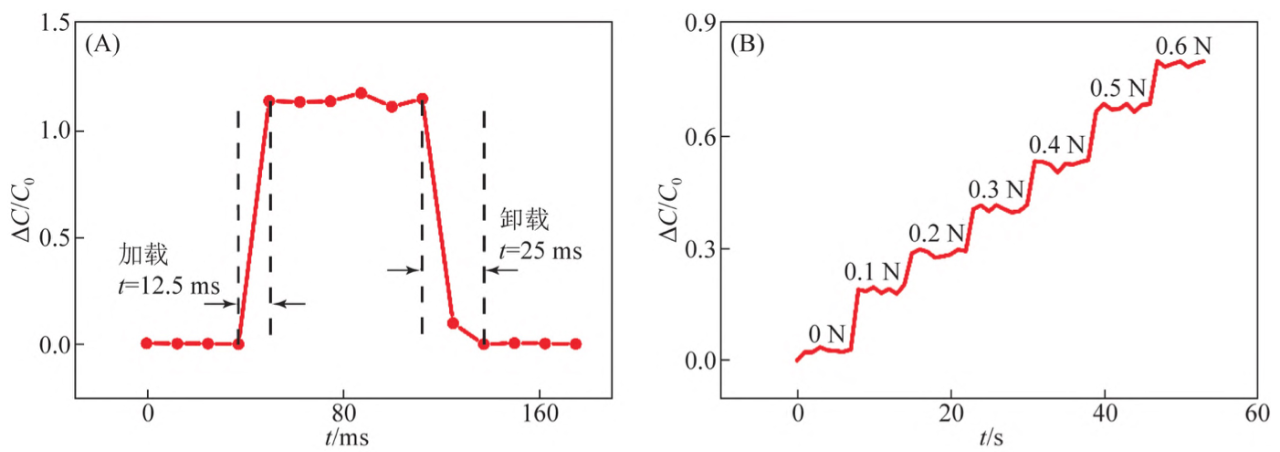
图6 电容式柔性三维力传感器的加载/卸载响应时间、最小检测下限与力分辨率
该电容式柔性三维力传感器可应用于人体运动检测,研究人员利用该传感器分别展示了点击鼠标、点击键盘回车键、手指指腹按压和拳式按压的测试结果。结果表明,这4组实验数据的峰值均较为稳定,反映了该传感器的稳定性。
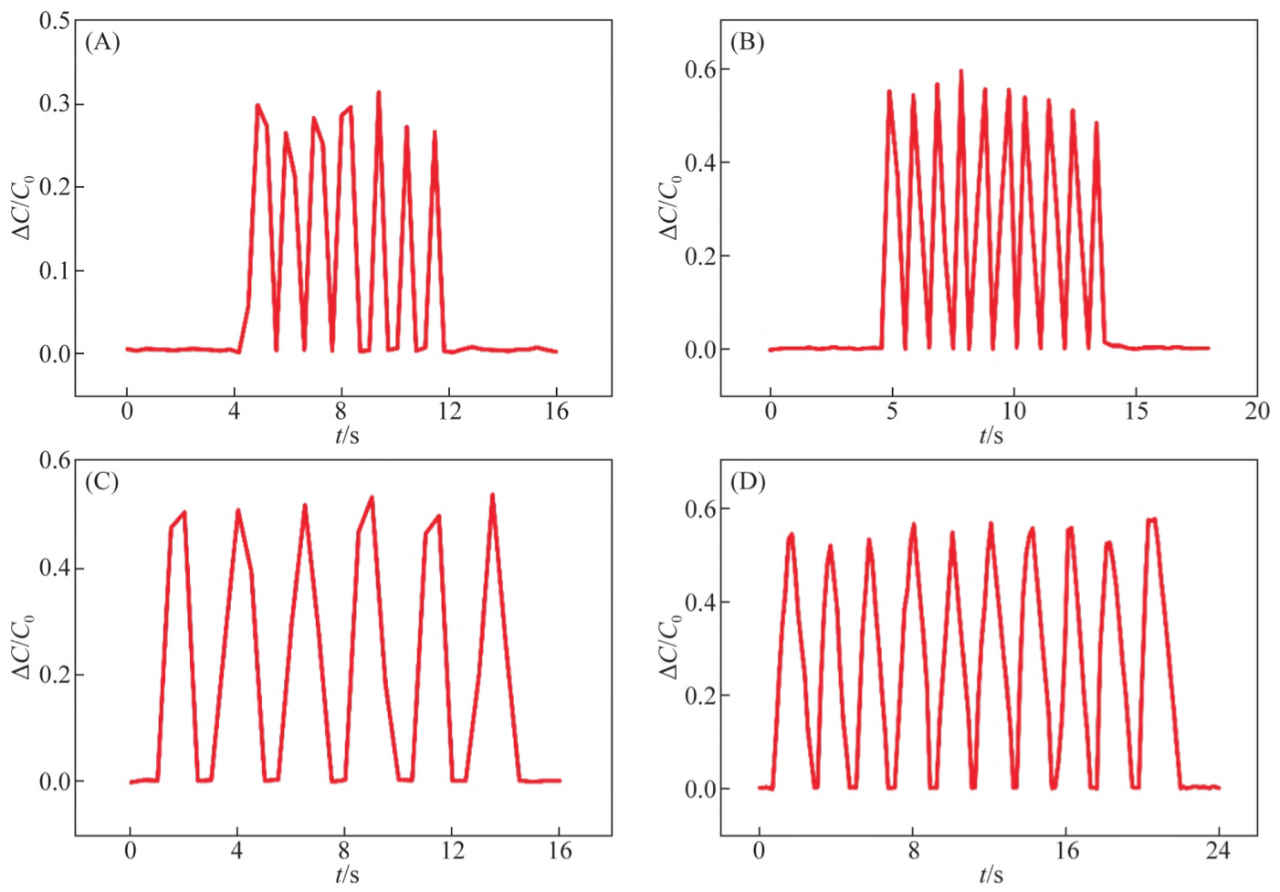
图7 电容式柔性三维力传感器在点击鼠标、点击键盘回车键、手指指腹按压和拳式按压测试中的电容相对变化曲线
综上所述,这项研究提出一种可用于人体运动检测的电容式柔性三维力传感器,该传感器拥有良好的灵敏度和可重复性,且结构简单、造价低廉、制作过程简洁。这项研究为柔性三维力传感器的研究提供了一种新的方案。
论文信息:
DOI: 10.16862/j.cnki.issn1674-3873.2024.04.012
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
