小鹏最新发布的类人机器人「Iron」因“太像人”而登上热搜。
视频中,它自然行走、抬手、转头,动作几乎没有传统机器的僵硬感。
它们精准、高效,却“硬邦邦”,不适合与人直接接触。
但如今,机器人正走向服务、医疗、仿生、协作等场景——在这些场合,“柔”比“刚”更重要。
柔性意味着安全、顺应与自然。它让机器人能在人群中工作、能握手、能穿戴、能协助康复。
于是,“像人”不再只是外形上的模仿,而是结构、驱动和感知系统全面的“柔性化”。
小鹏Iron 的走红,反映出公众对“拟人机器人”的全新关注:
机器人不仅要动得像人,更要“感觉上像人”。而要实现这种从“机械”到“生物”的跨越,靠的不是金属的精密,而是材料的温度。
这也是我们材料工程师看到的信号:未来的机器人设计,选材将决定体验。
下面从三个维度看,为什么聚合物是机器人选材的核心支撑。
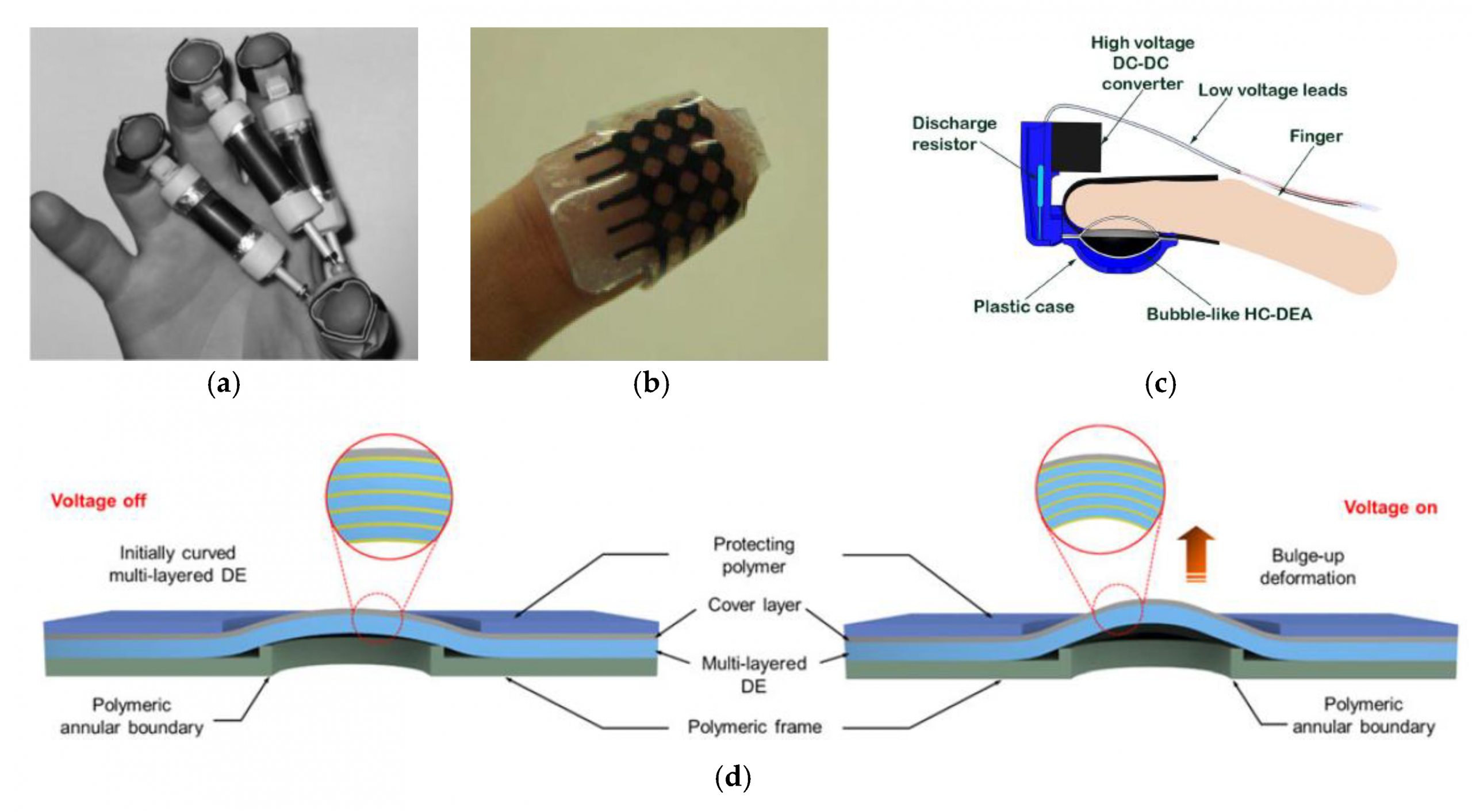
电活性聚合物(EAP)、液晶弹性体(LCE)、离子凝胶等正被用作柔性驱动材料,让机器能像生物肌肉那样伸缩、弯曲。
介电弹性体(DE):硅橡胶、丙烯酸弹性体,可在高电场下产生可达数百%的应变;
液晶弹性体(LCE):通过光或热刺激实现可逆形变;
离子型EAP(IPMC):低电压驱动、大幅弯曲,模仿鱼鳍、触手等仿生动作。
-
热塑性材料(PEEK、EVA、PTFE):既能加工,又有韧性;
-
-
需要柔顺关节 → 弹性体(PU/Silicone);
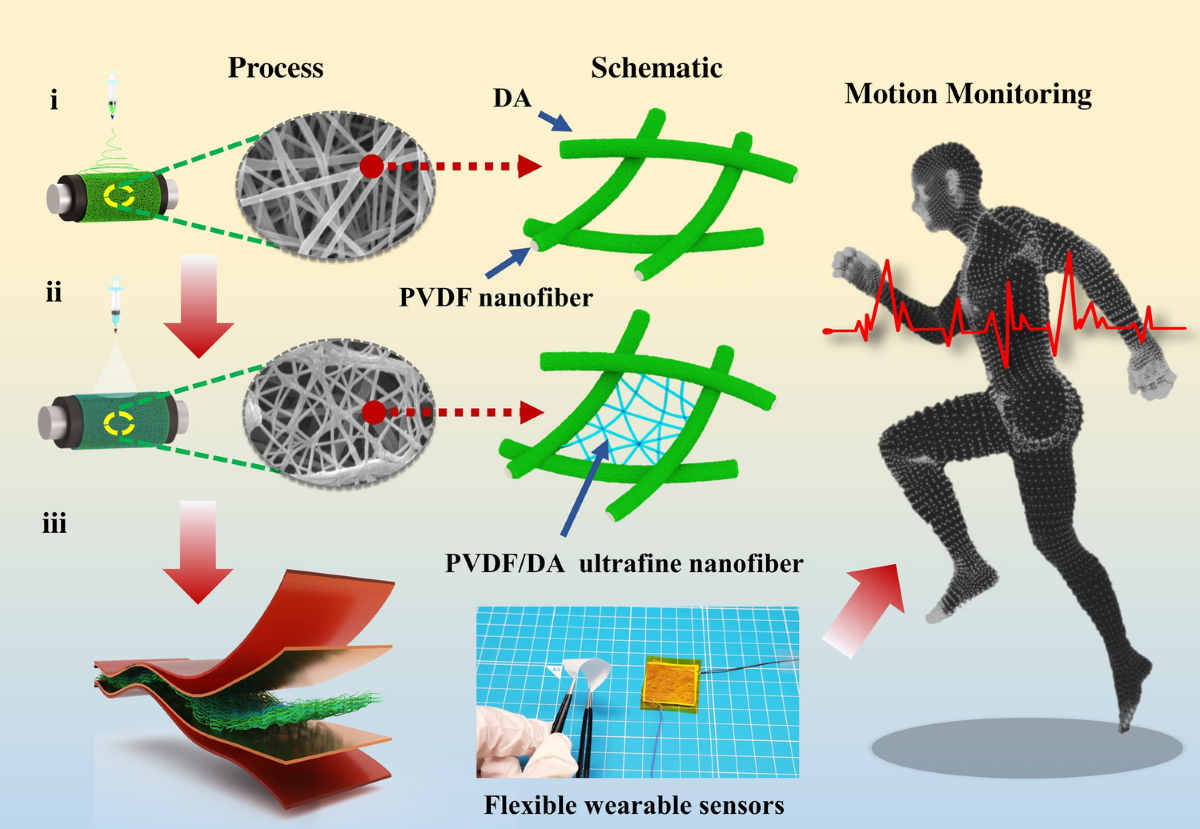
PVDF / PVDF-TrFE:压电与铁电特性兼具,可感知压力与应变;
PDMS / PI:可嵌入导电填料形成柔性触觉传感层;
导电聚合物(PPy、PANi):具备自响应能力,可兼作信号传导材料。
| 设计维度 |
关键性能 |
材料类型 |
应用示例 |
| 驱动 |
应变率、响应速度 |
EAP、LCE |
人工肌肉、仿生臂 |
| 结构 |
模量、断裂伸长 |
PU、PEEK、环氧复合 |
骨架与关节 |
| 感知 |
压阻灵敏度、贴合度 |
PVDF、PDMS、导电聚合物 |
机器人皮肤、传感单元 |
https://mp.weixin.qq.com/s/rQ1k3wRYMAYSfAK6vjS1yg?scene=1
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群