
在打造更智能、更逼真的机器人道路上,“皮肤”正成为突破关键。相比传统刚性材料,具备柔性、伸展性与感知能力的“电子皮肤”正逐步走入主流视野。这类柔性触觉传感器不仅具有柔性化、灵敏性、伸展性和柔韧性等特征,还能模拟人类的触觉与感知。
根据传感机制不同(工作原理和测量对象的不同),电子皮肤触觉传感器可分为压阻式、电容式、压电式、光电式、电磁式等。 其中压阻式与电容式传感器结构简单、成本低,是灵巧手较为常用的触觉传感器。
1、压阻式触觉传感
其机理为:当电极之间的压阻材料受到外界压力时,其电阻值会发生变化,通过检测电阻变化来反映出外部压力或接触状态的变化。
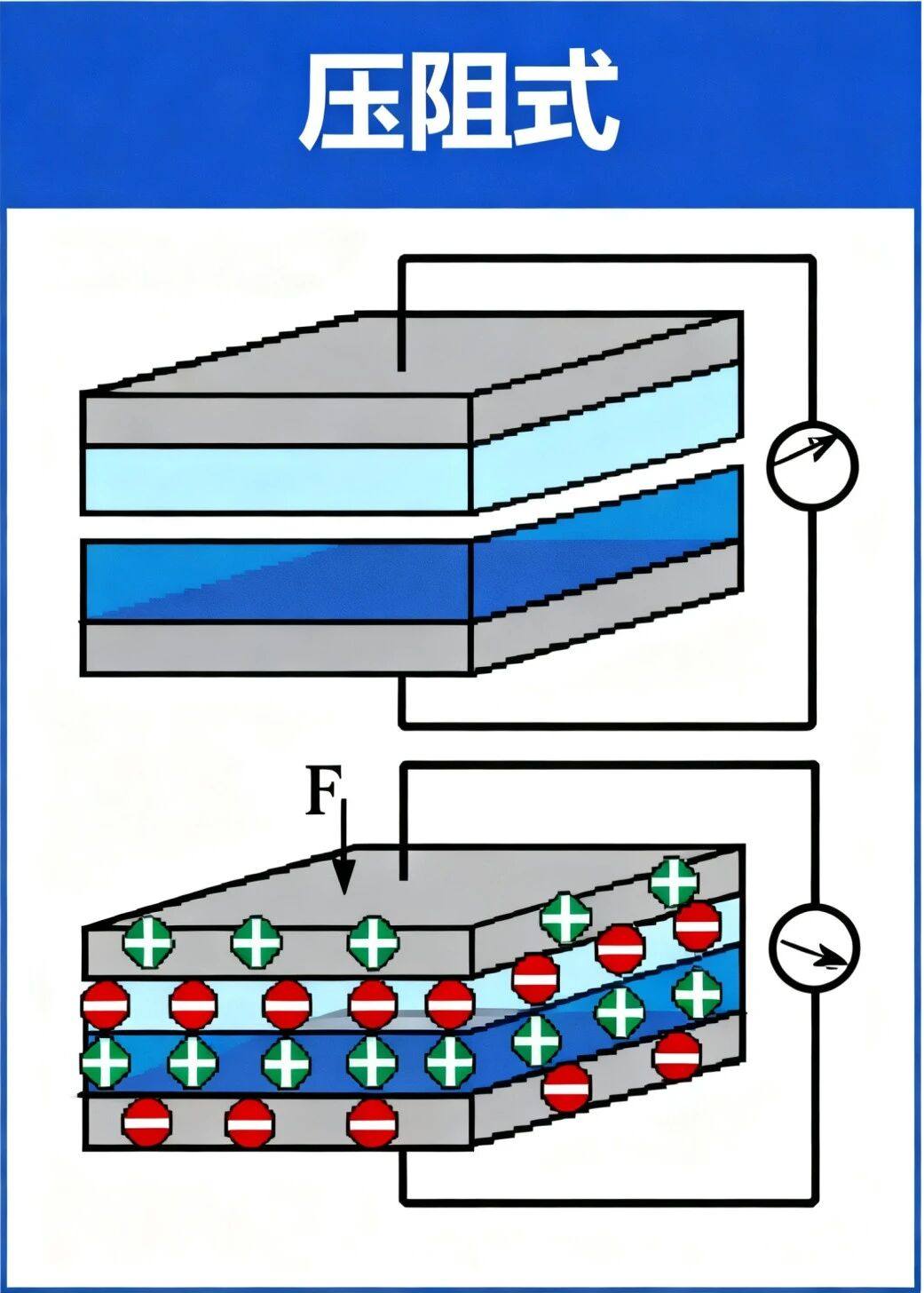
优点是:灵敏度高、过载承受力强、频率响应高、制备工艺简单、成本低;
缺点在于:稳定性差、体积大,不易微型化、迟滞性较大、功耗高、温漂大无法直接精准测量切向力、在宽量程范围内信号一致性差。
目前专注于压阻式电子皮肤的企业有:能斯达电子、墨现科技、模量科技、武汉华威科智能、福莱新材、晶智感新材料、力感科技、埔慧科技、纽迪瑞等。
相关阅读:
2、 电容式触觉传感
其原理为:电容通常包含上下两个电容极板和中间介电层。在外力作用下,两极板间的相对位置发生变化,从而导致电容变化,通过检测电容变化量来获取受力信息。
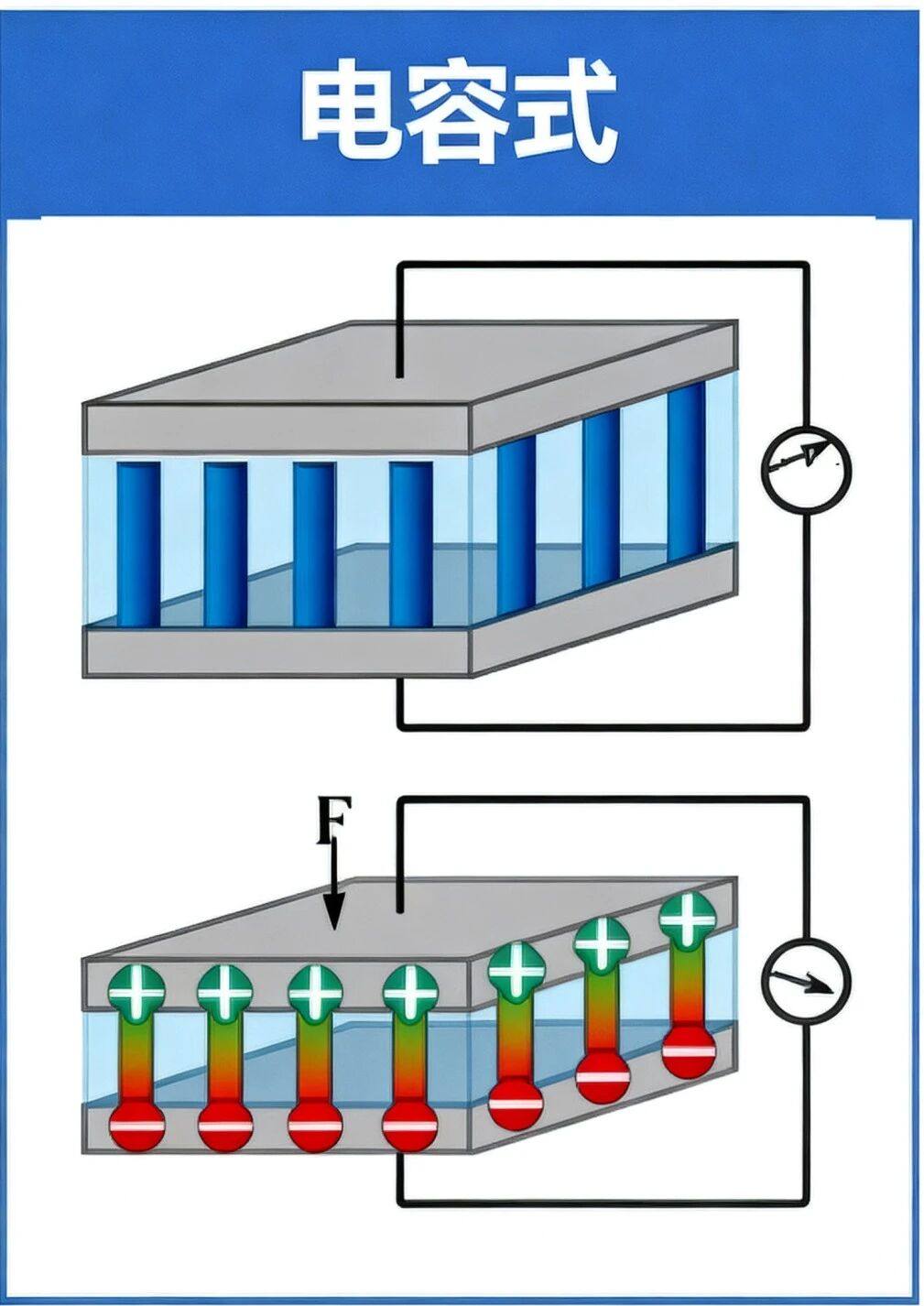
优点是:灵敏度高、结构简单、制造成本低、测量量程大、线性度好、实时性高、功耗低、受温度影响小、空间分辨率高、动态范围宽;
缺点是:尺寸大,不易集成化、易受周围导电物体产生边缘电容干扰,稳定性差、响应非线性,信号采集电路比压阻式复杂、负载能力差。
目前深耕电容式触觉传感的企业有:他山科技、赛感科技、申昊科技等。
相关阅读:
3、 压电式触觉传感
其原理为:当压电材料在外部压力作用下产生形变时,材料的内部会出现极化现象,造成电荷分离,形成不同的极距。利用这种压电效应可以检测外部刺激(如压力、振动等)。

优点有:不需要外部电源,可实现自供电、动态响应性能好、耐用性较好、在宽量程内,信号的线性度高;
缺点有:测量电路复杂,对硬件电路要求严格、难以检测静态压力、易受噪声以及温度影响、较难对切向力进行直接的定量测量、空间分辨率差。
目前专注于压电式触觉传感的企业有:灵动佳芯。
4、 光电式触觉传感/视触觉
其原理为:将机械刺激(力、压力、形变等)转化为光信号的可测量变化(如光强、波长、相位、传播路径等)再通过光检测元件转换为电信号。
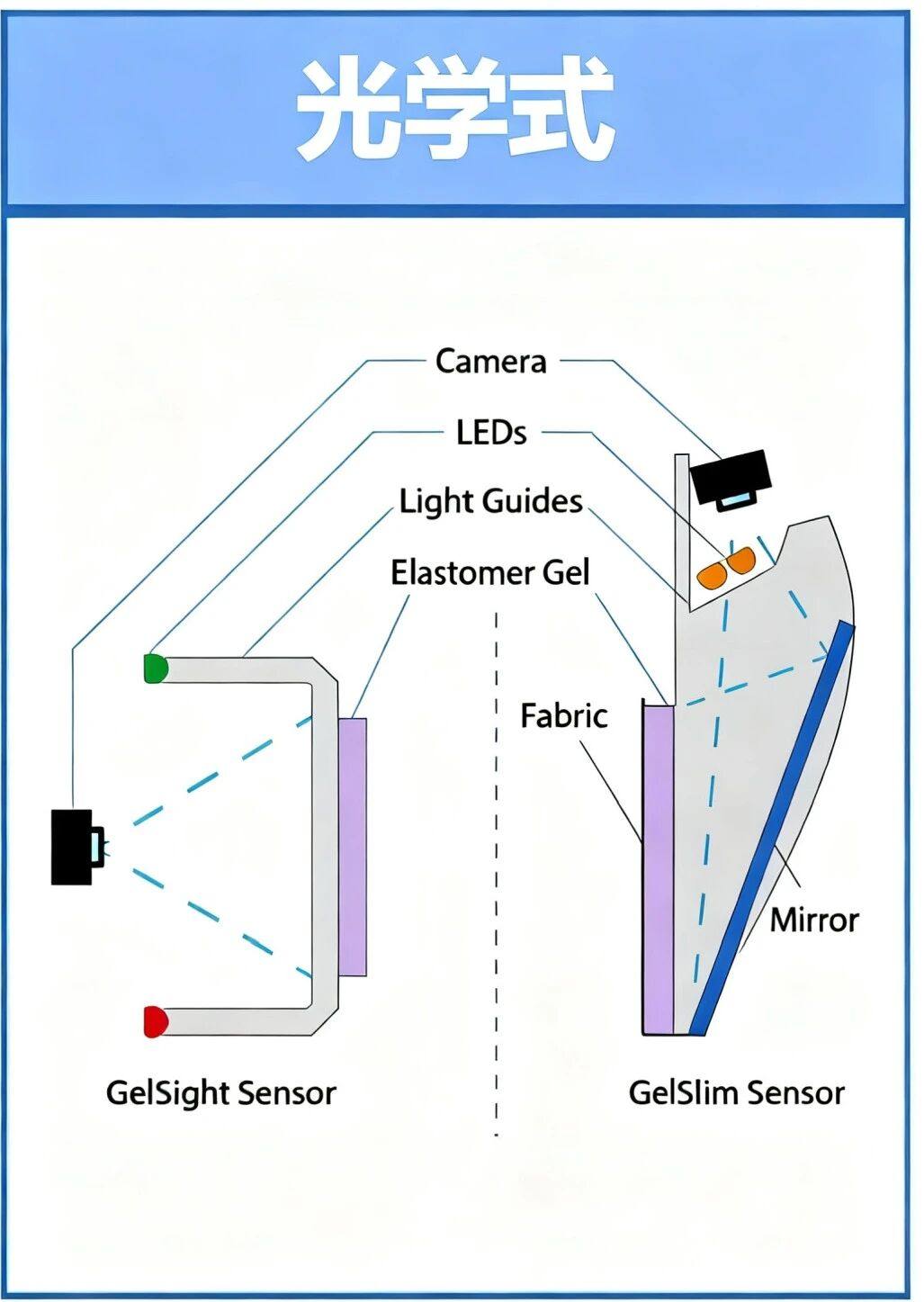
优点是:较高的空间分辨率、电磁干扰影响小;
缺点是:线性度较低、数据实时性差、标定困难、光学系统成本高、长期工作磨损会造成信号漂移问题。
目前专注于光电式触觉传感的企业有:GelSight、一目科技、千觉机器人、纬钛机器人、戴盟机器人、叠动科技。
相关阅读:
5、 电磁式触觉传感
其原理为:通过机械刺激(力、形变)改变磁场分布,再将磁场变化转换为电信号。
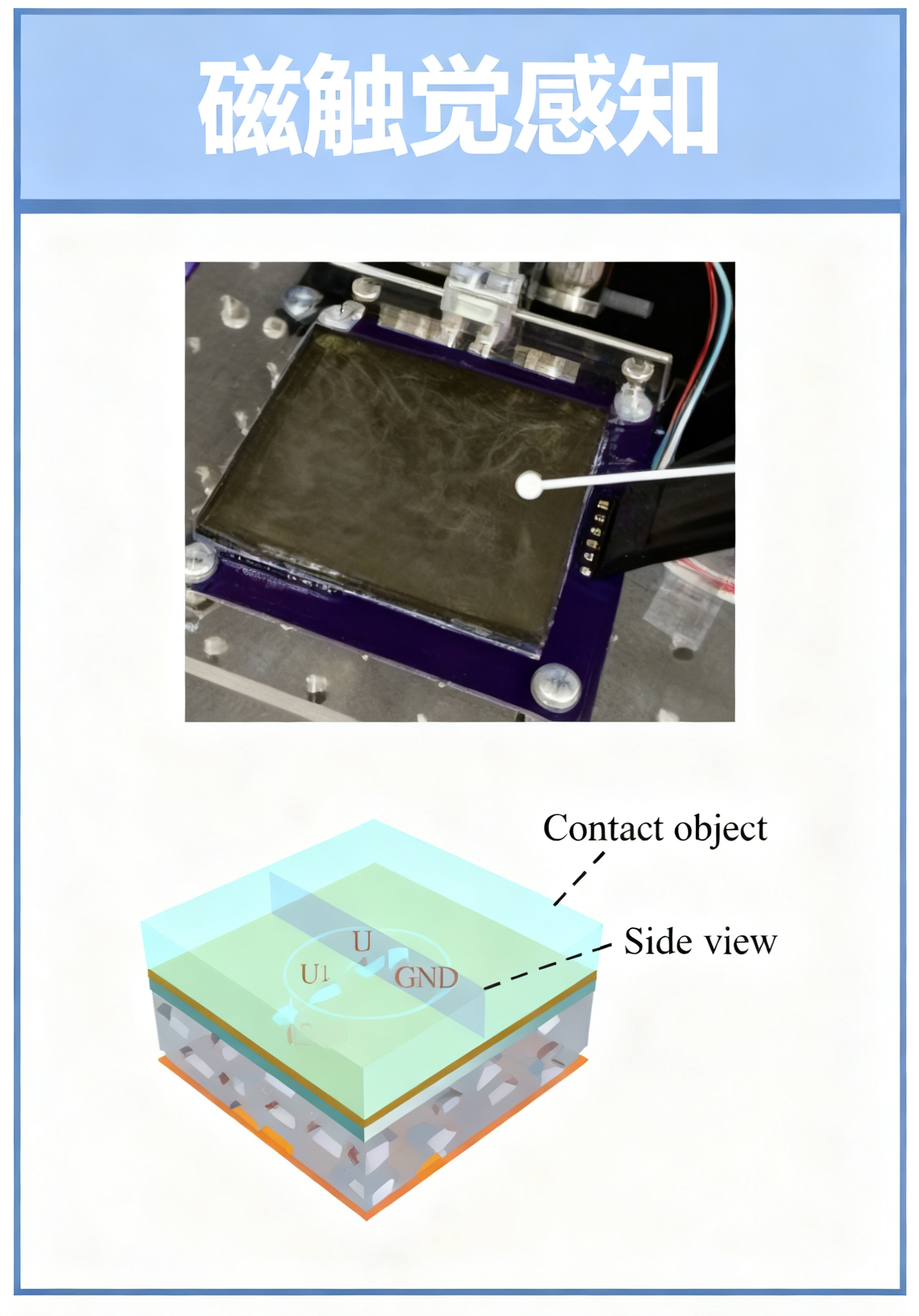
优点有:宽动态响应范围、响应速度可达毫秒级、可实现三维力感知;
缺点有:结构复杂、体积较大、容易受到外部磁场或电路噪声影响。
目前深耕电磁式触觉的企业有:帕西尼感知。
来源:艾邦综合整理
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
