
在柔性传感与健康监测领域,实现宽压力范围、超高灵敏度与长期信号稳定性一直是技术难点。传统传感器在高负载下易出现结构硬化与信号漂移,限制了其在动态生物力学监测中的可靠应用。尽管已有研究通过微结构或梯度设计提升性能,但多数仍面临制备复杂、界面不稳定或反应不均等挑战。
近日,中国科学院重庆绿色智能技术研究院、重庆大学等机构的研究团队在《ACS Sensors》上发表最新研究。
该团队受人体皮肤梯度模量结构启发,提出了一种梯度模量离子电子传感器(GMIS),通过将微结构离子凝胶与玻璃纤维增强基质结合,仅用两层结构即实现了0–3 MPa宽压域下的超高灵敏度(2904 kPa⁻¹)与低信号漂移(11.8%)。该传感器在动态负荷下表现出优异的稳定性,并可与卷积神经网络(CNN)结合,实现对踝关节力矩的高精度预测,相关系数超过0.91。
原文链接:
https://doi.org/10.1021/acssensors.5c02354
GMIS采用自上而下的模量梯度设计,软层优先变形以扩大接触面积,硬层逐步承压,延缓结构硬化,提升灵敏度与动态范围。
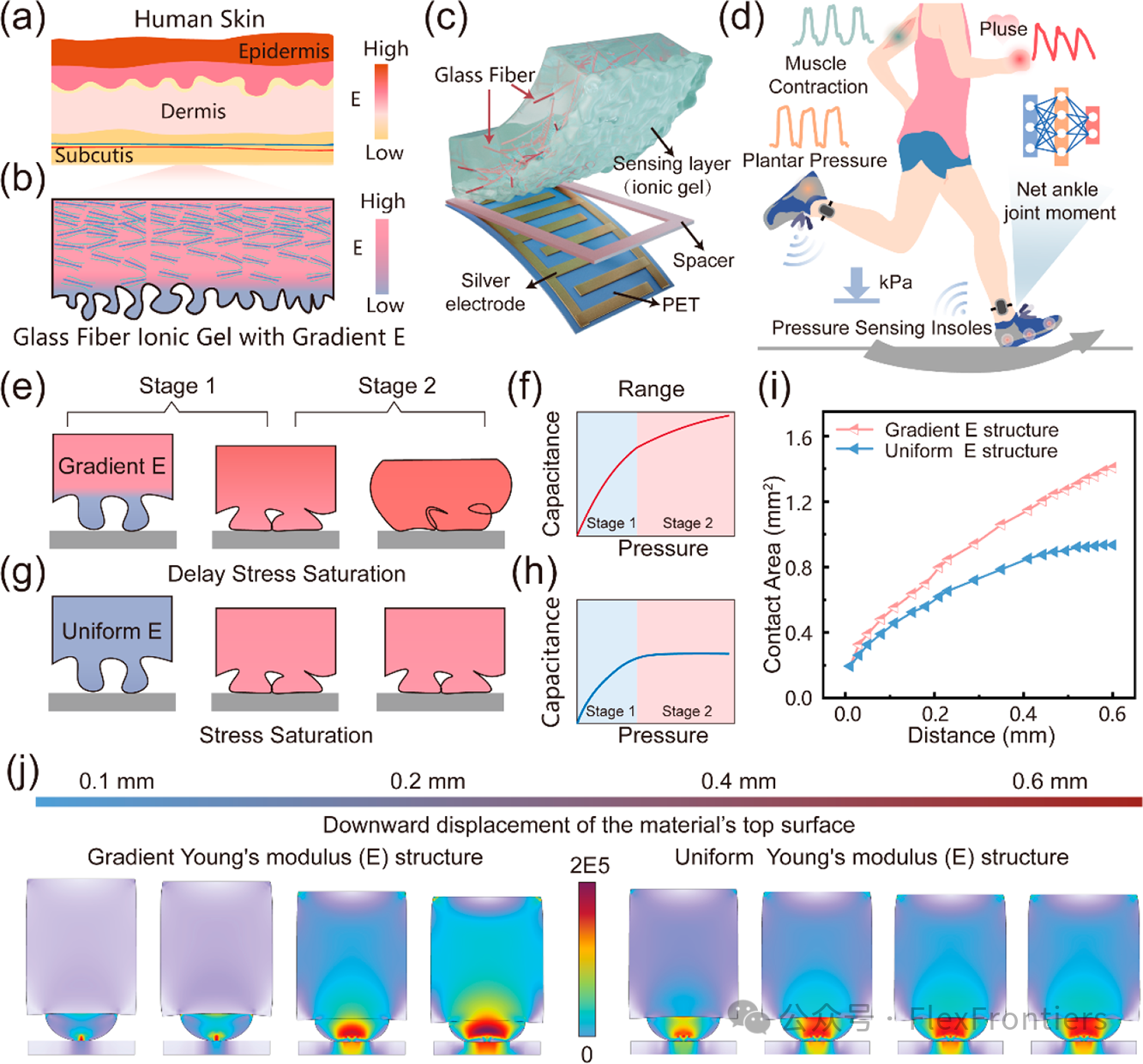
Fig. 1. GMIS的结构设计与工作机制
玻璃纤维与PVA链形成强氢键网络,显著抑制粘弹性蠕变,将信号漂移从均匀结构的62.28%降至11.8%,提升长期稳定性。
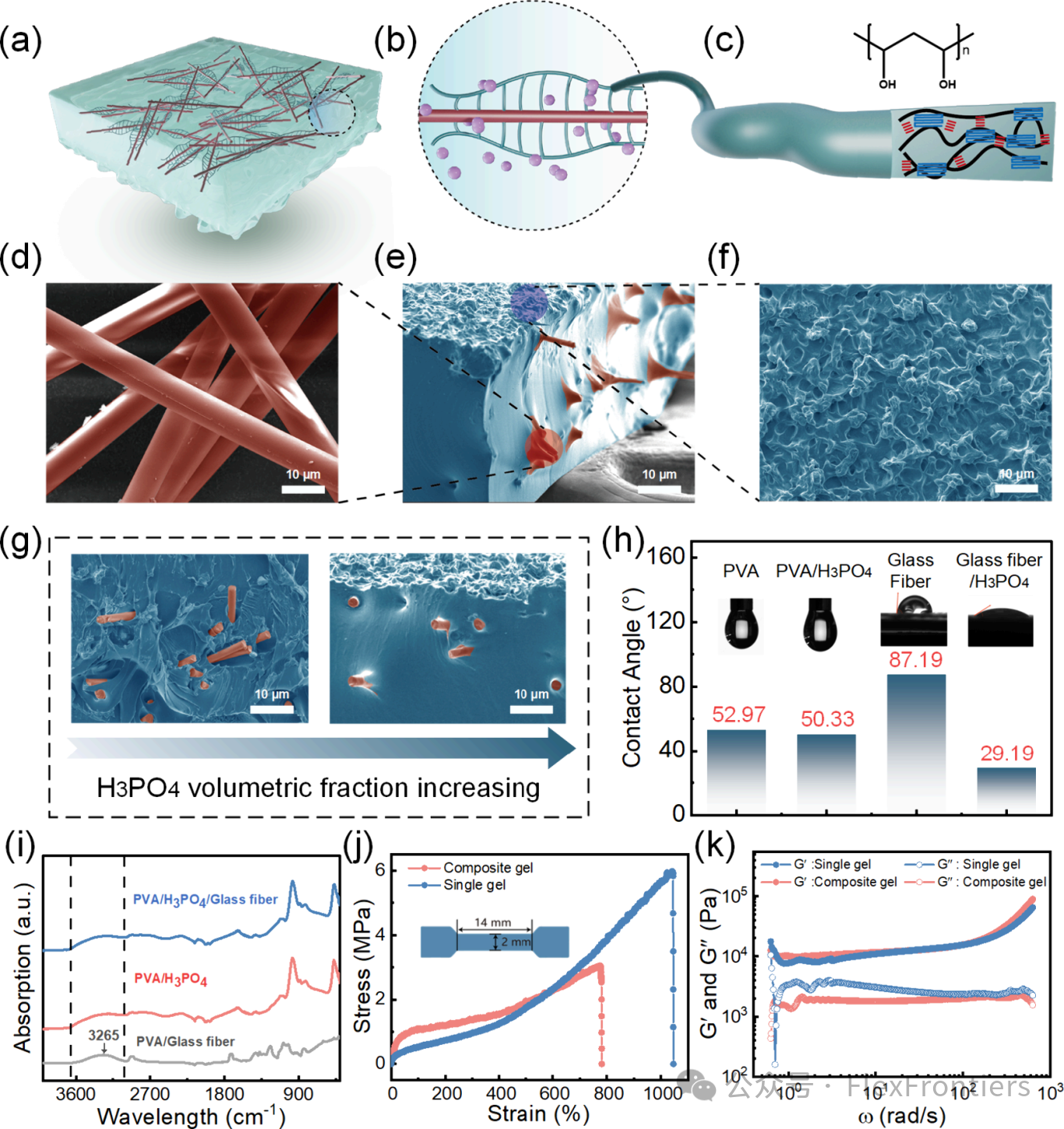
Fig. 2. GMIS结构与力学性能表征
GMIS在0–100 kPa范围内灵敏度达2904 kPa⁻¹,约为均匀结构的两倍;响应时间260 ms,恢复时间78 ms,适用于实时监测。
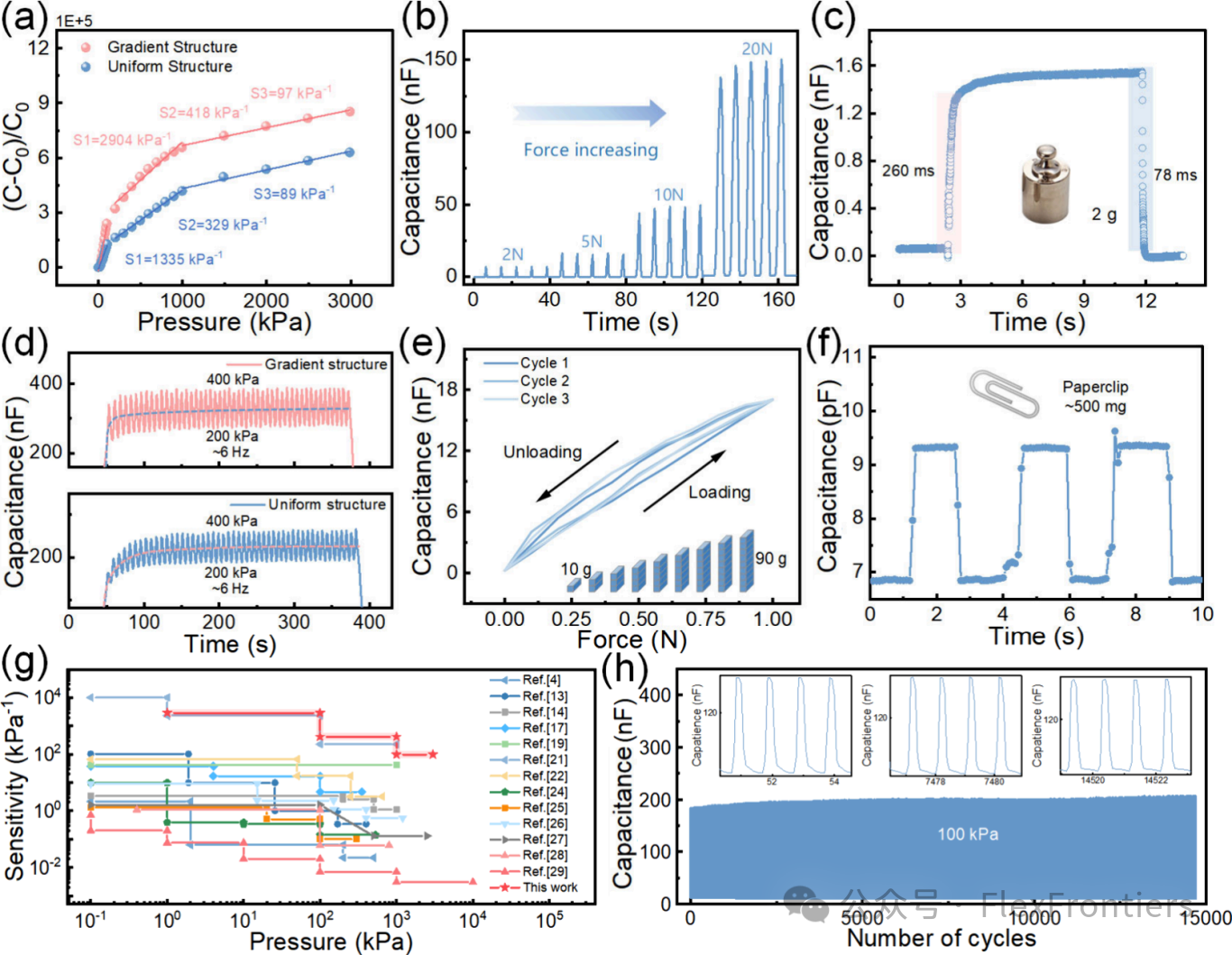 Fig. 3. GMIS的传感性能
Fig. 3. GMIS的传感性能
成功应用于脉搏、肌肉活动、吞咽、指关节弯曲等生理信号的实时检测,并构建八通道压力鞋垫系统,结合CNN实现踝关节力矩的动态预测。
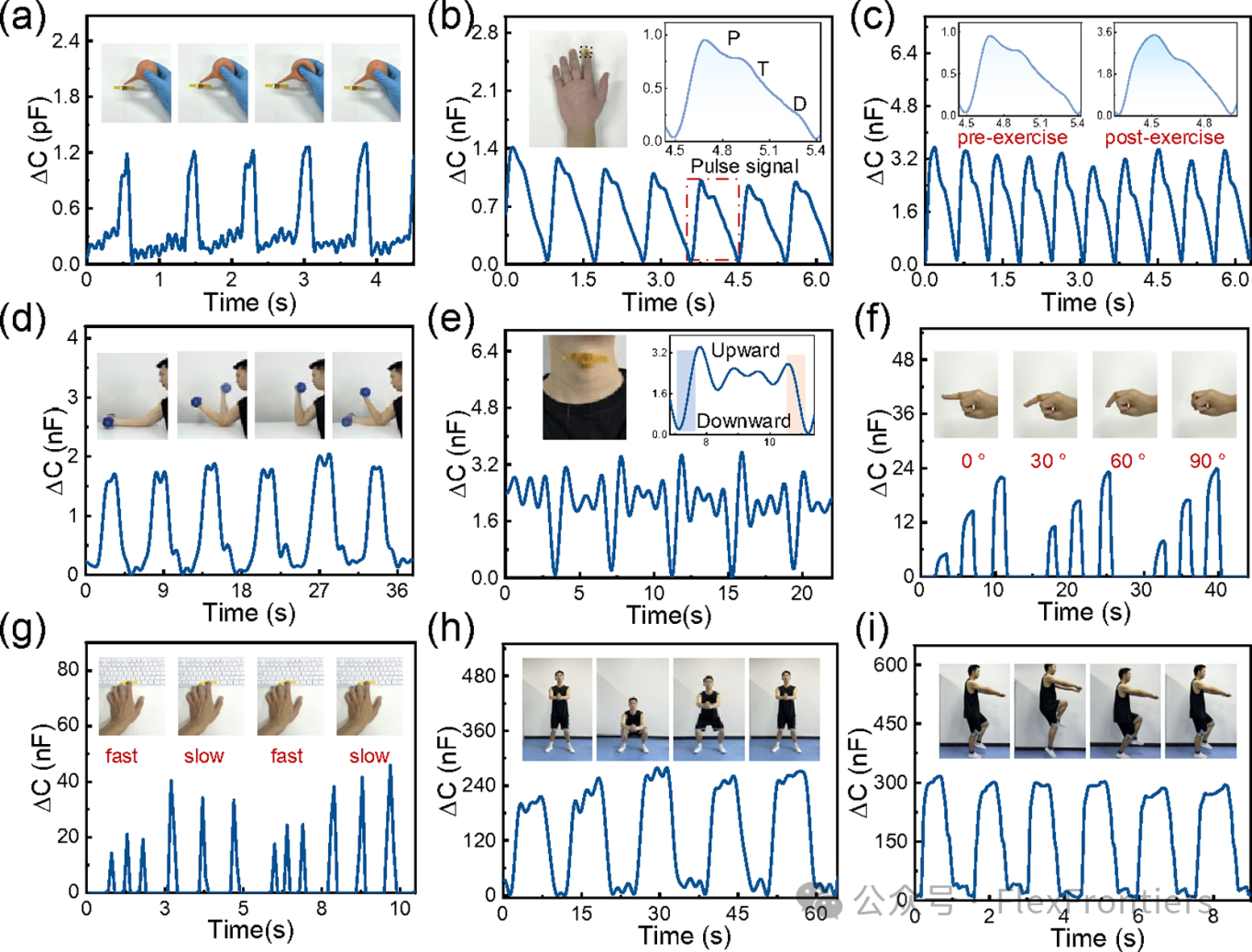
Fig. 4. GMIS在人体运动信号监测中的应用
-
在100 kPa下循环15000次仍保持稳定;
-
在3 MPa下循环3000次响应仅衰减8.5%;
-
CNN预测踝关节力矩的Pearson相关系数达0.91–0.93(行走/跑步)与0.87–0.91(跳跃);
-
温湿度变化下信号波动可控,具备良好环境适应性。
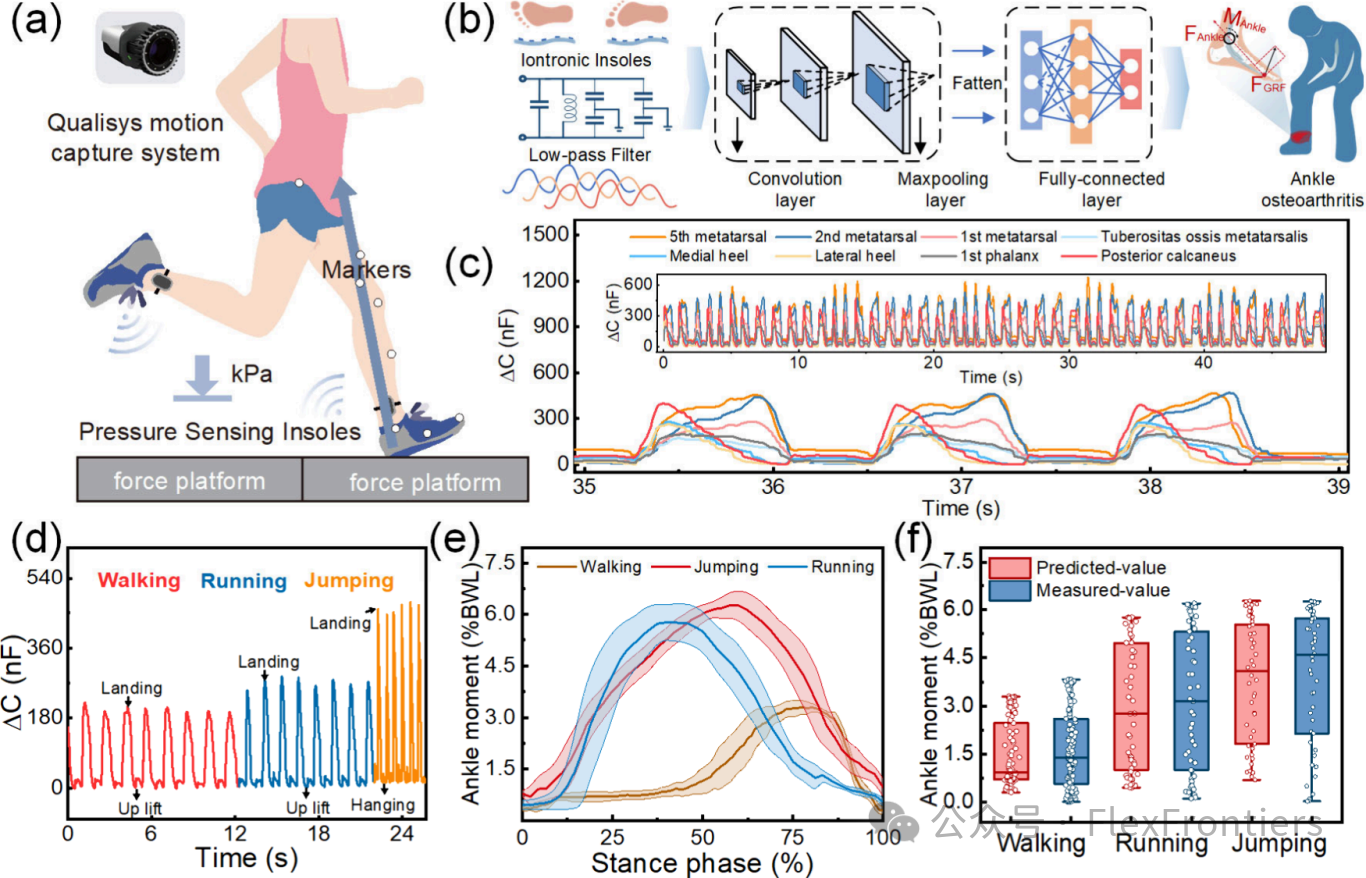
Fig. 5. 基于GMIS的压力鞋垫系统与步态分析
本研究提出了一种基于皮肤启发的梯度模量离子电子传感器,通过材料与结构创新,成功实现了宽压域、高灵敏度与低漂移的协同。GMIS具备制备简单、成本低、可扩展等优势,适用于运动康复、步态分析与长期健康监测,为下一代可穿戴生物力学传感器提供了可行的材料与系统级解决方案。
https://mp.weixin.qq.com/s/LGMhFu5GCE3LC0V0YE9qdA
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
