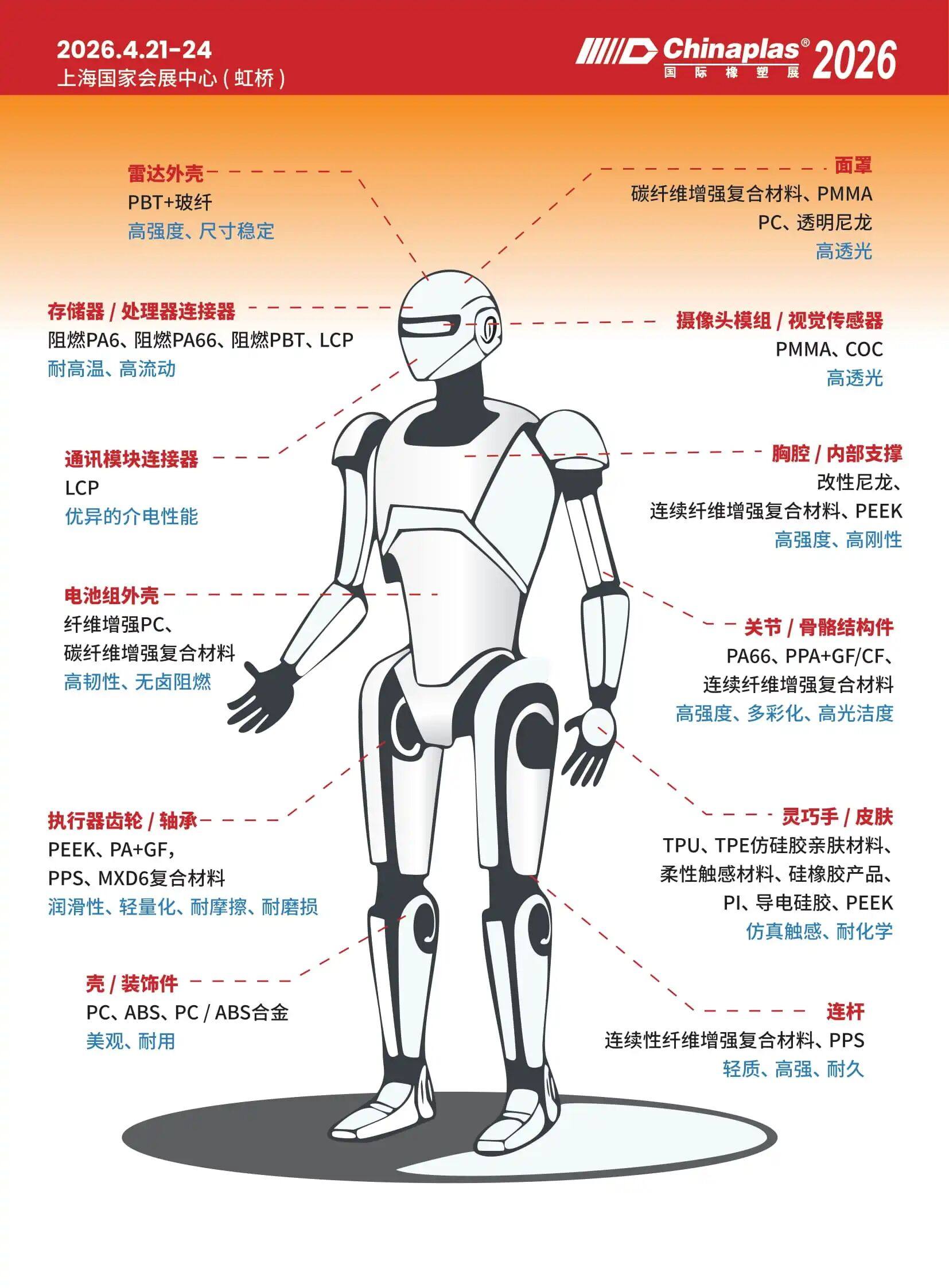
CHINAPLAS 2026 国际橡塑展,4月21 - 24日,与您相约上海 · 国家会展中心(虹桥)!
今年以来
人形机器人赛道持续火热
这一浪潮中
能为机器人带来“触觉”的
“电子皮肤”
也成了业内人士关注的焦点
皮肤,是人类感知外部环境的重要器官,而“电子皮肤”,则为人形机器人感知真实世界推开了“大门”。
电子皮肤本质是一种柔性触觉传感器,应用在机器人的全身及肩部、肘关节、膝关节、灵巧手等部位,赋予机器人以“人形”、感知能力,实现人机交互的能力。
此外,电子皮肤还可应用于医疗健康监测、智能穿戴、汽车智能座舱等领域。
电子皮肤可以帮助人形机器人
在外观上更接近人类
可类比人类的
表皮层、真皮层以及皮下组织
电子皮肤的结构主要包括:
柔性基底、导电传感层、封装层
柔性基底起支撑作用,作为电子皮肤的基础结构,提供机械柔韧性、可拉伸性及生物相容性,使设备能够贴合不规则表面(如人体或机器人曲面);
导电传感层是核心功能层,负责感知外部刺激(如压力、温度、湿度),并将物理信号转换为电信号,通过压阻、电容或压电效应实现信号转换,再通过纳米银线传输;
封装层覆盖在电子皮肤表层,提供防水、防尘及物理损伤防护,同时保持传感器对外部环境的敏感性。封装层通常采用PDMS。
电子皮肤的作用机理,是利用柔性基底材料例如PDMS、TPE、TPU、有机硅材料、水凝胶等,作为感知层,在受到外界压力、温度、湿度等刺激时柔性材料将发生形变,并在各种传感器中转变成数字信号,例如压力传感器、柔性触觉传感器、形变传感器、温度传感器、湿度传感器等。
数字信号经过电路系统进行传输并与中枢处理器或外部设备进行数据交换,通常使用丝网印刷、喷墨印刷、3D打印等工艺,将导电材料按照特定的路线图案在柔性基底材料上印刷电路。
▲图摄于CHINAPLAS 2025 国际橡塑展现场。
电子皮肤材料的选择,需要在柔韧性、导电性、传感性能、机械强度、耐久性、生物相容性功能和成本之间进行复杂的权衡。
要求:
柔韧性、可拉伸性、生物相容性、绝缘性、化学稳定性、可加工性。
常用材料:
聚二甲基硅氧烷(PDMS):最常用,柔韧性好、可拉伸(可达100%+)、生物相容性佳、透明、易加工(旋涂、模塑)、化学稳定。
聚酰亚胺(PI):机械强度高、耐高温、尺寸稳定性好、生物相容性一般,常用于柔性电路板基底,相对较硬。
聚氨酯:柔韧性好、耐磨、耐化学腐蚀、生物相容性可选,弹性模量范围广。
Ecoflex(铂催化硅橡胶):超软、超高拉伸性(可达1000%+)、生物相容性好,常用于需要极大形变的场景。
水凝胶:高含水量、优异的生物相容性、可调力学性能(软、可拉伸)、可离子导电、可刺激响应,适用于生物集成和可穿戴设备。
纸质/纺织物:低成本、可降解、透气性好、柔韧性好,适用于一次性或低成本应用。
要求:
高电导率、良好的柔韧性/可拉伸性、稳定性(机械、化学、电学)、与基底粘附性好、易于图案化。
常用材料与形式:
A. 金属基:
金属纳米线网络:金纳米线、银纳米线(最常用)、铜纳米线。形成渗流网络,柔韧性好,透明度可调。银纳米线导电性最优,但易氧化迁移;金纳米线稳定性最好但成本高。
金属薄膜:金、铂、铝等通过溅射、蒸发沉积的超薄金属膜(<100nm)。在弯曲时易产生裂纹导致电阻剧增,通常需要特殊结构设计(如岛桥、褶皱)。
液态金属:镓基合金(如EGaIn, Galinstan)。室温液态,导电性好,可拉伸性极佳(>700%),流动性可实现自愈合。封装和图案化是挑战。
B. 碳基:
石墨烯:超高电导率、机械强度、柔韧性、化学稳定性、透明度。常用形式为薄膜、薄片、墨水(需还原氧化石墨烯)。
碳纳米管:优异的电学、力学性能,高长径比易于形成导电网络。可制成薄膜、纤维、或分散在聚合物中形成复合材料。
碳黑/石墨粉:用于填充聚合物形成导电复合材料(如PDMS/CB, PU/Graphene)。成本低,易加工,但电导率相对较低,需要高填充量影响力学性能。
C. 导电聚合物:
PEDOT:PSS (最常用)、聚苯胺、聚吡咯。本身具有导电性、柔韧性好、可溶液加工、生物相容性较好。
PEDOT:PSS电导率可通过添加剂或后处理提高,但湿稳定性是挑战。
D. 离子导体:
盐溶液(如NaCl in甘油/水凝胶):本身绝缘,离子导电,可拉伸性极好,透明度高,生物相容性好。适合电容式传感器,但易受环境影响(湿度、温度、蒸发),电导率远低于电子导体。
要求:
对应特定刺激(力、热、光、化学等)产生可测量的电信号变化(电阻、电容、电压、电流、频率等),良好的灵敏度和稳定性,与基底/电极兼容。
按传感机制分类:
A. 压阻式(电阻变化):
导电填料/聚合物复合材料:PDMS/AgNWs、PDMS/CNTs、PU/CB。压力下填料网络变形导致接触电阻变化。
微结构表面:在基底或电极表面制造微金字塔、微柱、微穹顶等结构,增大受压时接触面积的变化率,显著提高灵敏度。
裂纹结构:在金属薄膜或导电层上预置或诱导产生微裂纹网络,压力使裂纹闭合导致电阻下降(灵敏度极高)。
B. 电容式(电容变化):
平行板电容器:两层柔性电极中间夹一层可压缩的介电弹性体(如PDMS,Ecoflex,发泡材料)。压力改变电极间距和/或介电常数。
叉指电极:同一平面上叉指状电极,感应其上方介电层或导电物体的接近/接触。
C. 压电式(电荷/电压产生):
有机压电材料:PVDF及其共聚物(PVDF-TrFE)最常用,柔韧性好、可溶液加工成膜。ZnO纳米线也常被嵌入聚合物中。
某些生物聚合物,但性能通常不如PVDF。
D. 摩擦电式(电荷转移/电压产生):
两种不同摩擦电极序的材料接触分离产生电荷。结构设计是关键(如垂直接触-分离模式、滑动模式)。
E. 热电式(电压产生-温度):
利用塞贝克效应,常用材料:Bi₂Te₃基合金(高性能但刚脆)、PEDOT:PSS/碳纳米管复合材料(柔性)。
F. 电阻式(电阻变化-应变):
可拉伸导体(如金属纳米线网络、液态金属、导电复合材料)在拉伸时电阻增大。
G. 光学式(光信号变化):
将力/形变/温度转化为光信号(如荧光强度、波长)的变化。
常用发光材料:量子点、有机荧光染料、上转换纳米粒子。需要集成光源和探测器。
H. 化学/生物传感:
在电极表面修饰特定的敏感层(如酶、抗体、离子选择性膜、导电聚合物),通过电化学(电流、电位、阻抗)或光学信号响应目标物。
要求:
优异的阻隔性(水汽、氧气)、柔韧性/可拉伸性、化学惰性、生物相容性、透明性(如需光学传感)、与功能层粘附性好。
常用材料:
与基底类似,如PDMS、PU、Parylene C(气相沉积超薄保形涂层,阻隔性好但较脆)、Si₃N₄/Al₂O₃(原子层沉积的纳米级薄膜,阻隔性极佳但刚脆需与柔性层结合)。
根据Precedence Research数据,2024年全球电子皮肤市场规模已达63亿美元,预计到2034年将达到300亿美元,期间年复合增速高达17%。
电子皮肤的潜力,吸引了从科研机构到科技巨头的广泛关注及参与。
篇幅有限,橡橡之后再开一期,给大家盘点一下布局人形机器人电子皮肤的企业~
算法的“大脑”思考世界
电子皮肤的“双手”触摸未来~
而感知的基石
源于材料的革新!
想要深入了解
这些“塑”造未来的神奇材料?
想要洞见技术趋势
掘金人形机器人产业链核心环节?
(素材源自:央视网、艾邦高分子、中国工信新闻、艾邦机器人、RIO材料说、RIO机器人、福莱新材、柔性电子与传感器等,由CHINAPLAS国际橡塑展综合整理,转载请注明。)
点击“阅读原文”,进行CHINAPLAS 2026观众预登记!
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群