我们认为,灵巧手传感器需要实现两个核心功能:1)触觉-机械刺激:由触觉传感器实现,包括单维力(即接触力)和三维力(接触力+切向拉力);2)位置-本体刺激:由六维力传感器实现。
1)触觉-机械刺激:触觉感知是仿人机器人与外部环境交换信息的核心途径之一,使机器人能够展现出物体识别、灵巧操作和刺激响应等类人行为,通过不同原理(压阻/电容/压电/光学式方案/磁性传感),触觉传感可以用于估计接触力、粗糙度、纹理和重量等信息,补充传统的视觉信息(如位置、形状和颜色)。
2)位置-本体刺激:高维的空间感知和模拟接触物理世界。如何实现空间感知仍然是灵巧手传感器方向的主要挑战。六维力传感器可以在一个笛卡尔坐标中提供三个方向的力和三个力矩。我们认为,目前柔性触觉传感器在单维力和三维力测量中可以和力矩传感器实现功能替代,但六维力传感器可以进行空间位置的测量和感知,在灵巧手应用中实现高维的空间感知,即位置-本体刺激功能。
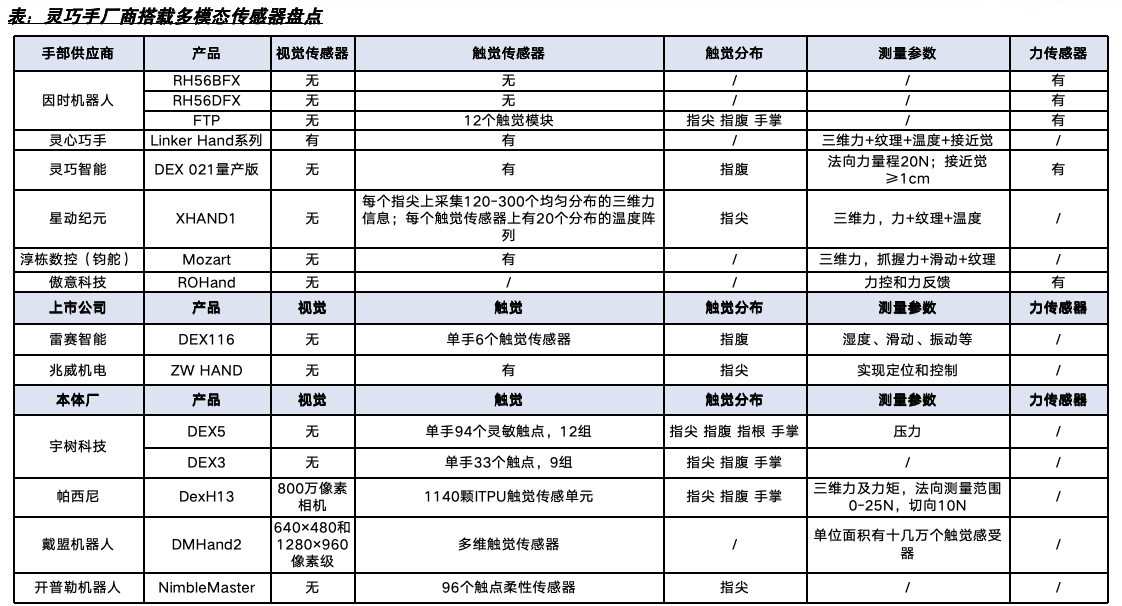
此外,我们梳理了不同公司的触觉传感器方案和六维力传感器产品,其中,触觉传感器方案包括帕西尼的磁性传感器、戴盟机器人的光学式传感器、他山科技的触觉传感器方案、途见科技的一种压电式传感器专利、能斯达的一种压电式传感器专利等;六维力传感器产品涉及的厂商有ATI、柯力传感、宇立仪器、坤维科技和蓝点触控。
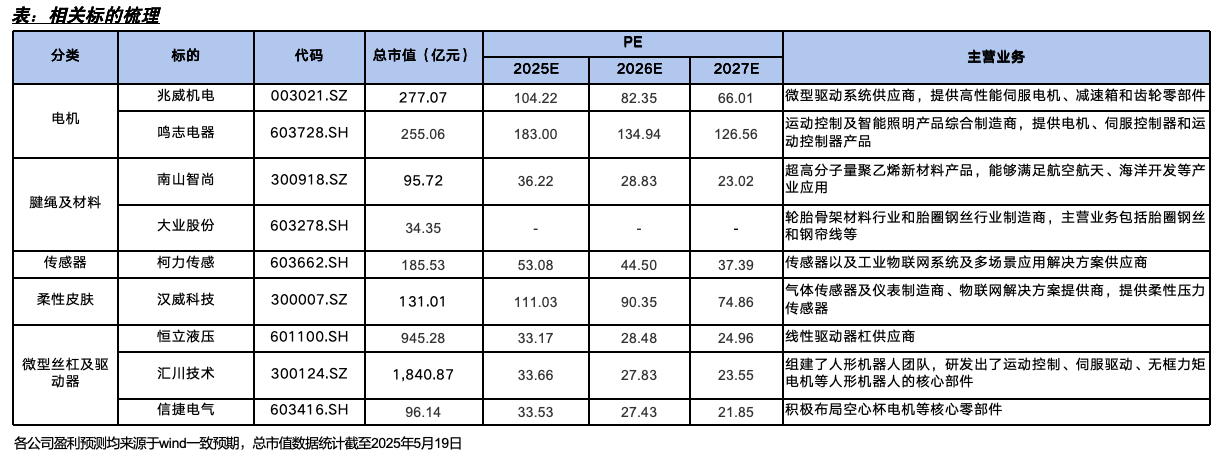
行业评级与投资建议:我们维持灵巧手所在的人形机器人行业“推荐”评级。我们认为人形机器人目前处于技术突破、商业化落地初期,建议关注灵巧手相关硬件的核心标的:1)电机:兆威机电、鸣志电器等;2)腱绳及材料:南山智尚、大业股份等;3)传感器:柯力传感等;4)柔性皮肤:汉威科技等;5)微型丝杠及驱动器:恒立液压、汇川技术、信捷电气等。
风险提示:人形机器人行业进展不及预期风险;中美贸易摩擦超预期风险;灵巧手核心技术迭代不及预期的风险;重点关注公司业绩不及预期风险;报告中使用的公开资料滞后性风险。
前言:从第一性原理出发,探讨人体皮肤的感知要素及对应的传感器功能
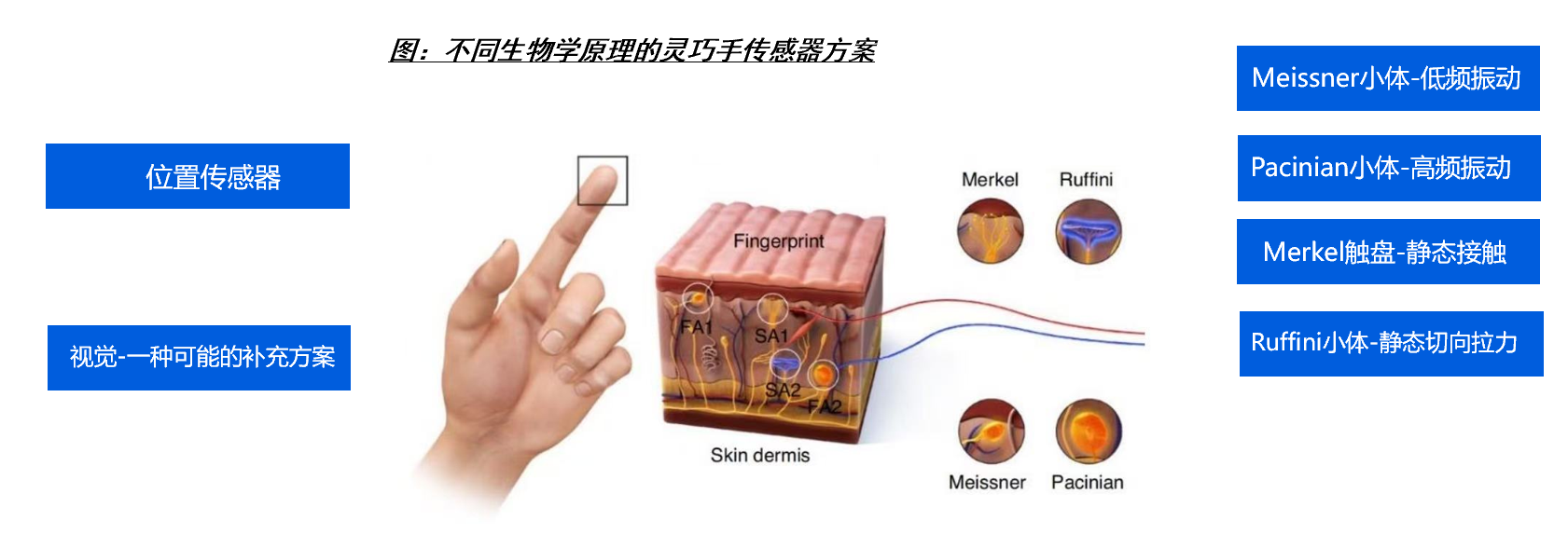
人体皮肤可以感知到的信息:机械刺激、温度刺激和本体刺激等。其中:机械刺激主要由四种机械感受器(小体)负责,分别捕捉低频振动力、静态接触力、静态切向拉力和高频振动力;温度刺激由温度受体实现;本体刺激指对自身空间位置的感知,由本体感受器实现。
对应地,在传感器实现拟人化皮肤方面,机械刺激可以由触觉传感器实现;温度刺激可以由温度传感器实现;本体感受可以由六维力矩传感器实现。因此,本报告试图从第一性原理出发,基于人体皮肤的生物学功能,讨论传感器如何在灵巧手上实现类人感知。
1)触觉-机械刺激:由触觉传感器实现,包括单维力(即接触力)和三维力(接触力+切向拉力);
资料来源:顾一丁《智能感知机械手柔性触觉传感器的研究》,国海证券研究所
一、柔性触觉传感器:实现灵巧手信息识别+力检测+力控制
1.1.1 触觉传感器:实现灵巧手的信息识别+力检测+力控制
触觉传感在灵巧手上的功能主要分为输入和输出两大类,1)输入端:识别、输入信息,如:操作对象的状态和形状、大小和刚度等特征;灵巧手和操作对象的接触状态;检测操作对象的物理性质;2)进行力的检测;3)输出端:实现力的控制。装配触觉传感器后,灵巧手可以实现更复杂的操作任务,实现输出力(做功)+根据力的反馈做精细运动。如:“拖地”这一操作需要识别拖把本身和拖把的大小,还需要用力拖地;抓取拖把时需要判断和控制抓握力的大小,如果抓握力过小,拖把可能会滑落;如果抓握力过大,可能会损坏物体。
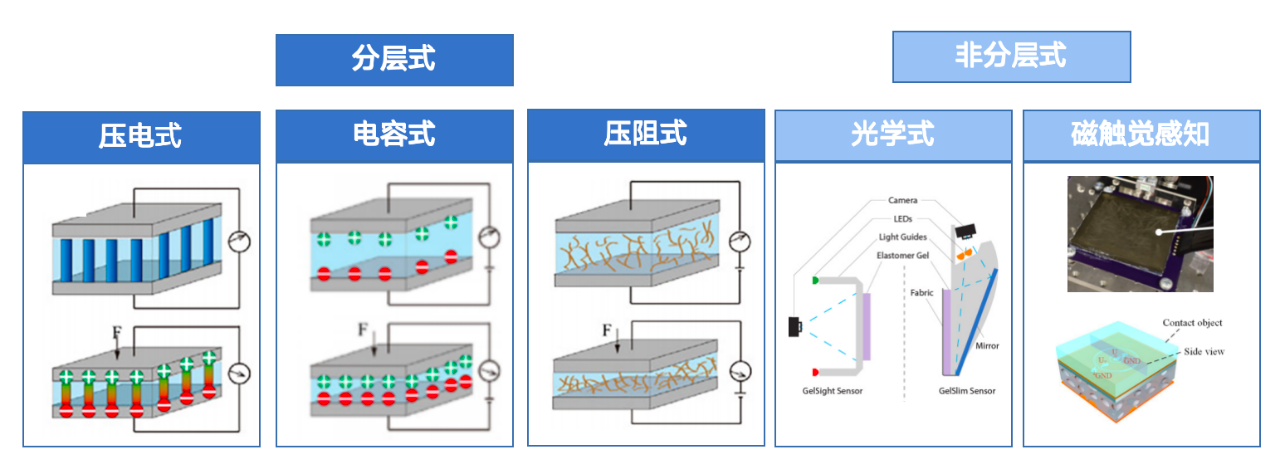
分类:基于不同的工作原理,可以将触觉传感器分为压阻式、电容式、压电式、光学式和磁触觉感知式等。
资料来源:孙富钦等《柔性仿生触觉感知技术:从电子皮肤传感器到神经拟态仿生触觉感知系统》,CCF智能机器人专委公众号,国海证券研究所
触觉传感器的柔性化:使传感器从物理特征上像皮肤一样柔软,并可以在任意载体表面进行测量,不受面积和结构影响。
1)触觉传感器中的敏感元件单元为刚性,利用柔性材料如硅橡胶作为传播媒介,接触面不携带传感功能,仅靠刚性传感器硬件获取信息。如,将六维力传感器放置在由硅橡胶组成的柔软皮肤内部,制成灵巧手的指尖;
2)敏感元件为刚性,由柔性组织结构组合而成,如使用网状设计,将各类电子线路嵌入柔软的薄膜上,如,可以形成网格状的集成阵列,或集成温度和触觉等(如,一种阵列式柔性传感器,薄膜的一面是半导体温度传感器,另一面是导电聚合物触觉传感器);
3)触觉传感器自身是柔性材料,如具有压阻特性的压力敏感导电橡胶和具有压电特性的材料(如PVDF聚偏二氟乙烯等)。
 资料来源:徐菲《用于检测三维力的柔性触觉传感器结构及解耦方法研究》,宇树科技官网
1.1.3 触觉传感器功能:信息识别-纹理感知和单/多维力的读取
1)信息识别-Step 1:纹理感知。通过纹理可以反映接触表面材料的属性和制造工艺,将信息反馈给算法计算层,实现对物体的识别。
2)信息识别-Step 2:力的读取。力的读取分为单维触觉传感功能(垂直于表面的接触信息)和三维触觉传感能力(精准测量xyz三个方向作用力,即法向力+切向力)。
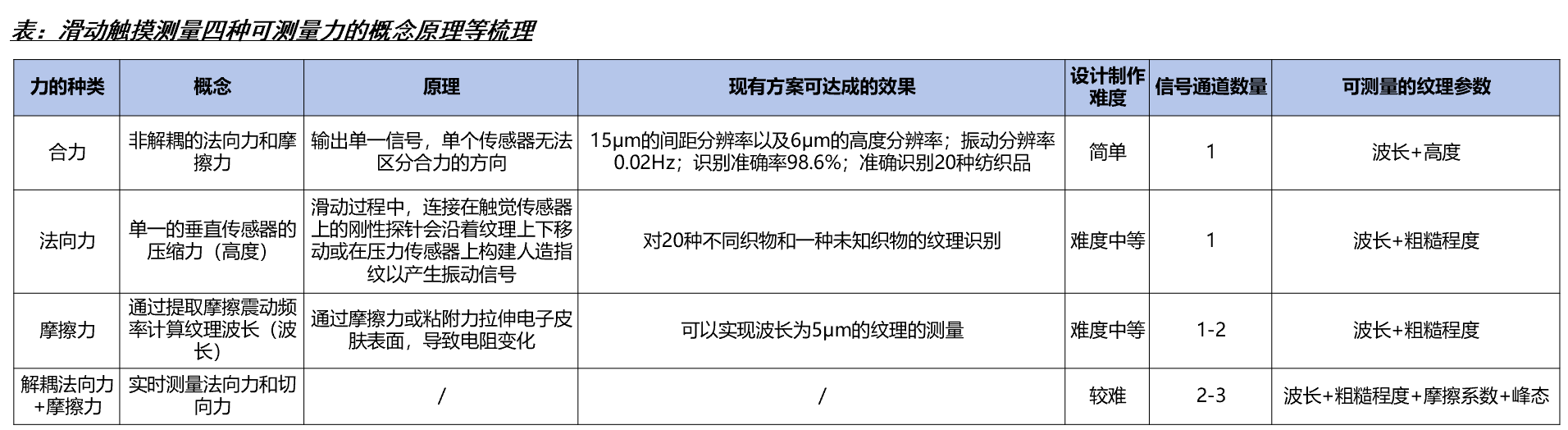
单次触摸:基于压力分布或接触面积来测量纹理,优点是简单直观;缺点在于测量区域局限,不利于大面积或长距离测量,以及较难获取纹理微观结构的形状特征和高度信息。
滑动触摸:优点是相较单次触摸能够获取更多测量参数,可以测量的参数包括:仅测量合力(法向力和摩擦力的总和)、仅测量法向力(压力)、仅测量摩擦力(沿切线方向作用的力)、解耦的法向力+摩擦力。目前的难点在于缺乏法向力和摩擦力的解耦方法等。
资料来源:Longteng Yu 等《Recent Progress in Tactile Sensing and Machine Learning for Texture Perception in Humanoid Robotics》,国海证券研究所
1.1.4 触觉传感器分类:基于压阻原理的柔性触觉传感器
原理:压阻式柔性触觉传感器是一种将机械信号转换为电信号的压力传感器,工作原理主要依靠材料的压阻效应,工作机制主要有以下三种:1)材料电阻率的变化;2)接触电阻的变化;3)复合材料中的量子隧穿效应。
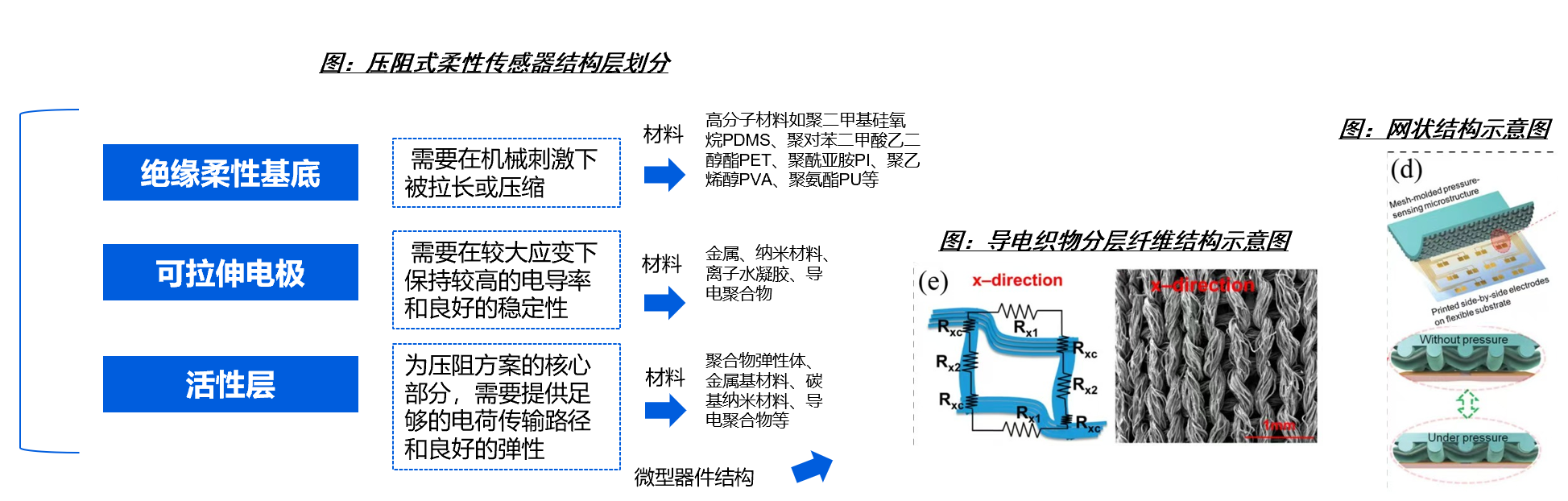
分层构成:活性层(弹性导体/半导体层)+两个电极,因此,通过调整材料种类、用量和活性层微观结构可以实现不同性能的压阻式压力传感器。
每层的材料选择:金属基材料(金属纳米线)、碳纳米材料(碳纳米管、石墨烯等)和导电聚合物、水凝胶等功能材料。
微观结构:可采用带状/波浪状/3D螺旋形/网格/蛇形或导电织物的独特分层纤维结构,如石墨烯纺织物等。
资料来源:徐菲《用于检测三维力的柔性触觉传感器结构及解耦方法研究》,宇树科技官网
1.1.3 触觉传感器功能:信息识别-纹理感知和单/多维力的读取
1)信息识别-Step 1:纹理感知。通过纹理可以反映接触表面材料的属性和制造工艺,将信息反馈给算法计算层,实现对物体的识别。
2)信息识别-Step 2:力的读取。力的读取分为单维触觉传感功能(垂直于表面的接触信息)和三维触觉传感能力(精准测量xyz三个方向作用力,即法向力+切向力)。
单次触摸:基于压力分布或接触面积来测量纹理,优点是简单直观;缺点在于测量区域局限,不利于大面积或长距离测量,以及较难获取纹理微观结构的形状特征和高度信息。
滑动触摸:优点是相较单次触摸能够获取更多测量参数,可以测量的参数包括:仅测量合力(法向力和摩擦力的总和)、仅测量法向力(压力)、仅测量摩擦力(沿切线方向作用的力)、解耦的法向力+摩擦力。目前的难点在于缺乏法向力和摩擦力的解耦方法等。
资料来源:Longteng Yu 等《Recent Progress in Tactile Sensing and Machine Learning for Texture Perception in Humanoid Robotics》,国海证券研究所
1.1.4 触觉传感器分类:基于压阻原理的柔性触觉传感器
原理:压阻式柔性触觉传感器是一种将机械信号转换为电信号的压力传感器,工作原理主要依靠材料的压阻效应,工作机制主要有以下三种:1)材料电阻率的变化;2)接触电阻的变化;3)复合材料中的量子隧穿效应。
分层构成:活性层(弹性导体/半导体层)+两个电极,因此,通过调整材料种类、用量和活性层微观结构可以实现不同性能的压阻式压力传感器。
每层的材料选择:金属基材料(金属纳米线)、碳纳米材料(碳纳米管、石墨烯等)和导电聚合物、水凝胶等功能材料。
微观结构:可采用带状/波浪状/3D螺旋形/网格/蛇形或导电织物的独特分层纤维结构,如石墨烯纺织物等。
资料来源:孙富钦等《柔性仿生触觉感知技术:从电子皮肤传感器到神经拟态仿生触觉感知系统》,李凤超等《柔性压阻式压力传感器的研究进展》,国海证券研究所
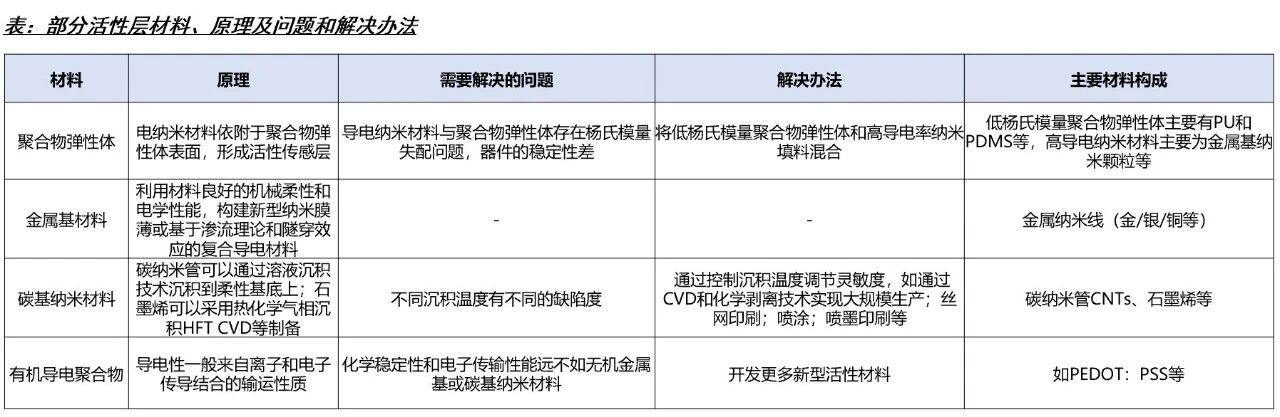
活性层及材料是柔性传感器的核心部分,需要解决导电性和可拉伸性,并尽可能地提高灵敏度、传感范围和稳定性。
活性层材料一般指集成到绝缘弹性基底上的导电纳米材料或者由绝缘弹性基体和导电纳米填料组成的复合材料,可以包括聚合物弹性体、金属基材料、碳基纳米材料、导电聚合物等。
资料来源:李凤超等《柔性压阻式压力传感器的研究进展》,国海证券研究所
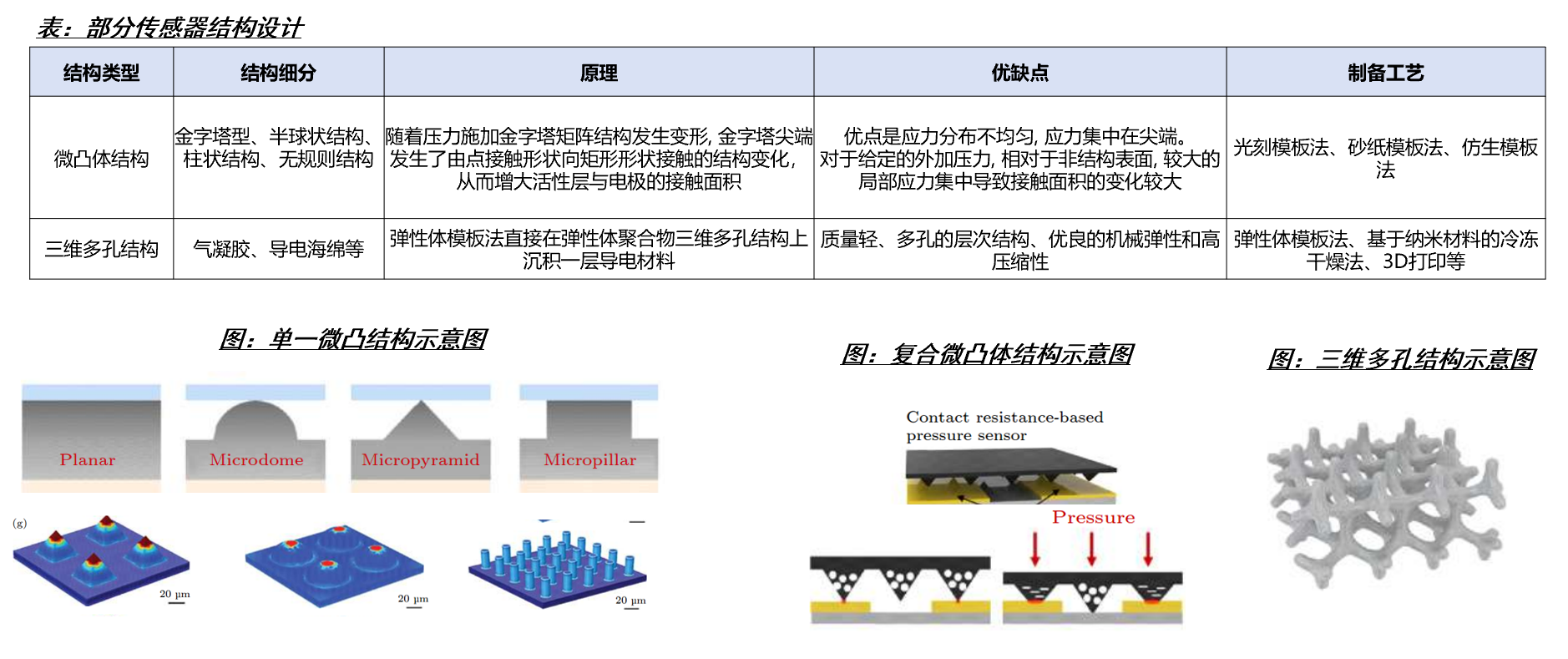
活性层的微型结构设计:
简单地将导电纳米材料沉积在绝缘弹性基底上或者改变弹性基体和导电填料的组成,并不能进一步提高灵敏度和传感范围等性能,因此需要根据传感器的传感机制对活性层材料进行微结构设计。微结构设计类型主要有三类:1) 单一微凸体结构(金字塔结构、半球状结构、半柱状结构、无规则结构等);2)复合微凸体结构;3) 三维多孔结构等。
资料来源:李凤超等《柔性压阻式压力传感器的研究进展》,国海证券研究所
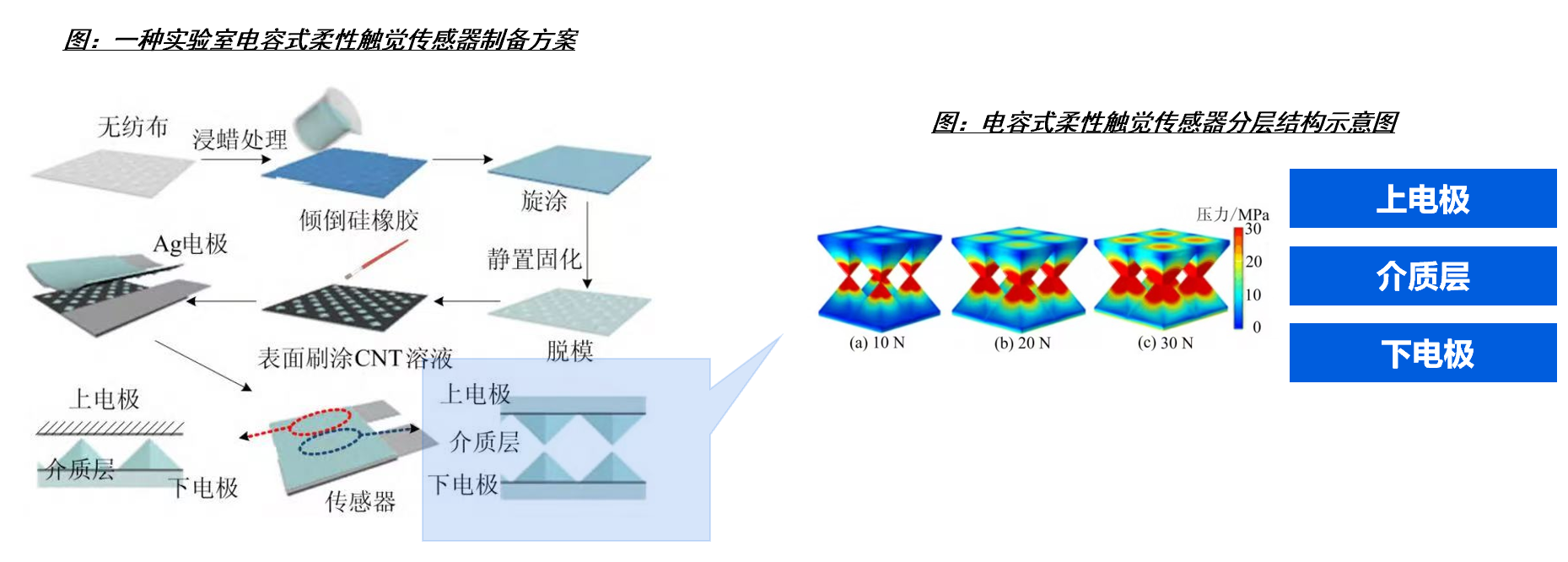
1.1.5 触觉传感器分类:基于电容原理的柔性触觉传感器
原理:将机械刺激转化为电容变化,感测性能随电介质层材料变形面积或厚度变化。
分层结构:由两端的导电极板和中间的介质层组成,通过固定计算公式C=ɛr×ɛo×(A /d),其中A是电容器的极板面积,d是两个分离的电极之间的距离,向垂直于电极的方向施加力后,d变化从而导致电容变化;此外,灵敏度受接触面积限制,随器件尺寸的减小迅速下降。
材料选择:碳基材料,水凝胶材料,金属基材料以及一些天然材料(花朵、叶子等植物材料)等。
微型结构:开发出了不同的电介质材料,如织物,孔隙,微圆柱,金字塔,微球,珠和针等。
资料来源:滕飞等《一种可扩展的高灵敏电容式压力电子皮肤》,国海证券研究所
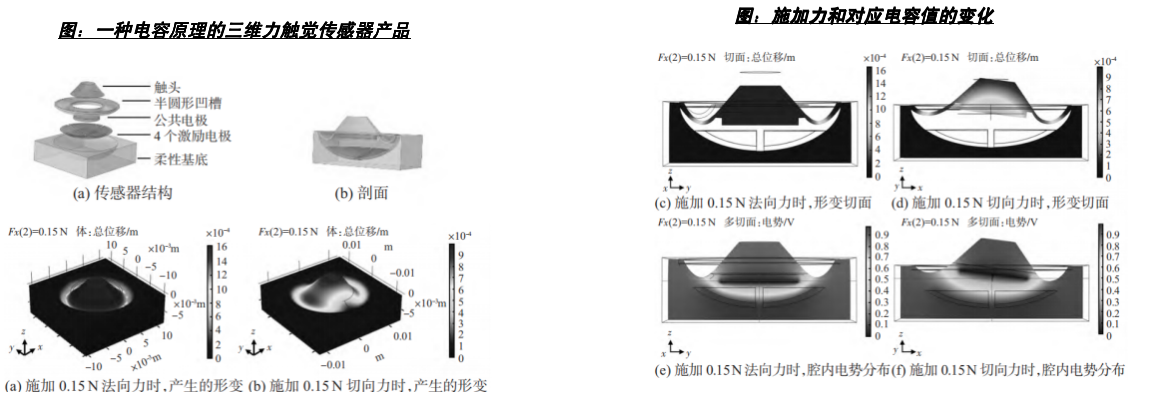
1.1.6 分层式柔性传感器应用案例:电容式三维力触觉传感器的结构和原理
电容式三维力触觉传感器结构可分为4个部分,即触头+半圆形凹槽+金属导电电极+基底,其中,基底为中空长方体结构,中空部分为空气腔,呈半椭球形,底部为4个椭球曲面激励电极,顶部(触头底部)是1个圆形公共电极,公共电极与激励电极之间的空气层作为介质层。触头是圆台结构,触头与基底之间由横截面为半圆形的凹槽结构支撑,在压力作用下半圆形的凹槽结构能够使公共电极发生偏移,导致电容值变化,实现三维力测量。
测力原理:4个椭球曲面电极组成2×2的阵列且与触头底部的公共电极分别形成4个呈不同方向分布的独立电容,通过传感器触头受到法向力作用而得出的4个电容值,反推施加的三维力的大小和方向。
资料来源:孙富钦等《柔性仿生触觉感知技术:从电子皮肤传感器到神经拟态仿生触觉感知系统》,国海证券研究所
1.1.7 触觉传感器分类:基于压电原理的柔性触觉传感器
原理:施加到器件上的力使压电材料变形,材料内部产生电荷极化,从而在相对表面上产生电荷。与电容式和压阻式相比,一个显著优点在于无需外接电源。
分层结构:主流的结构是“三明治结构”,在柔性压电薄膜上下表面各制作独立电极。
材料:主要有无机材料和有机材料两种。其中无机材料包括钛酸钡(BaTiO3) ,锆钛酸铅 ( PZT ) ,ZnO,石墨烯等;有机压电材料例如聚偏二氟乙烯( PVDF) 和聚(偏氟乙烯-三氟乙烯) ( P( VDF-TrFE) ) 等具有质地轻、柔韧性好和制备方法简单等优点,被认为是柔性电子产品的适宜材料。
资料来源:方定等《电容式三维力柔性触觉传感器及软抓取研究》
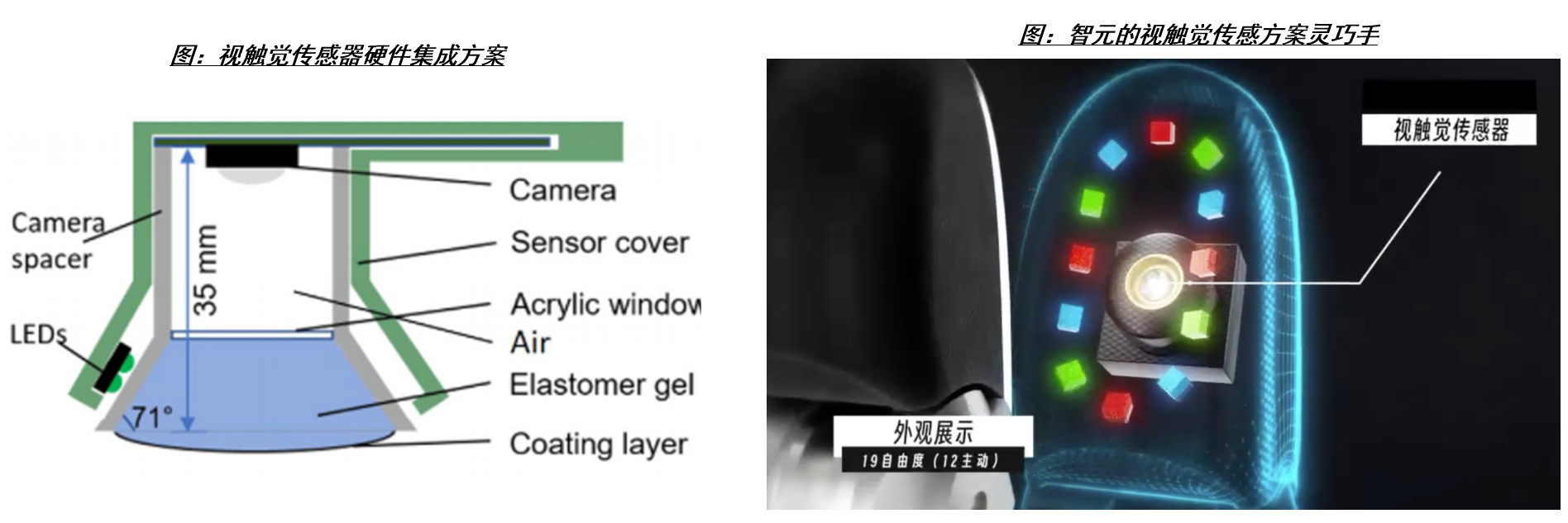
1.1.8 触觉传感器分类:搭配相机的光学传感器Gelsight方案
GelSight传感器的方案:可以采用内置相机和外置软凝胶弹性体的方案,基于光度立体法原理,识别纹理表面对软弹性体压缩所引起的形态变化。
目前采用该方案的灵巧手制造商有戴盟和智元机器人等。智元机器人视触觉感知方案:采用MEMS触觉感知+视触觉感知技术,触觉感知技术可以反馈物体接触的压力、形状、纹理等信息。
资料来源:Longteng Yu等《Recent Progress in Tactile Sensing and Machine Learning for Texture Perception in Humanoid Robotics》
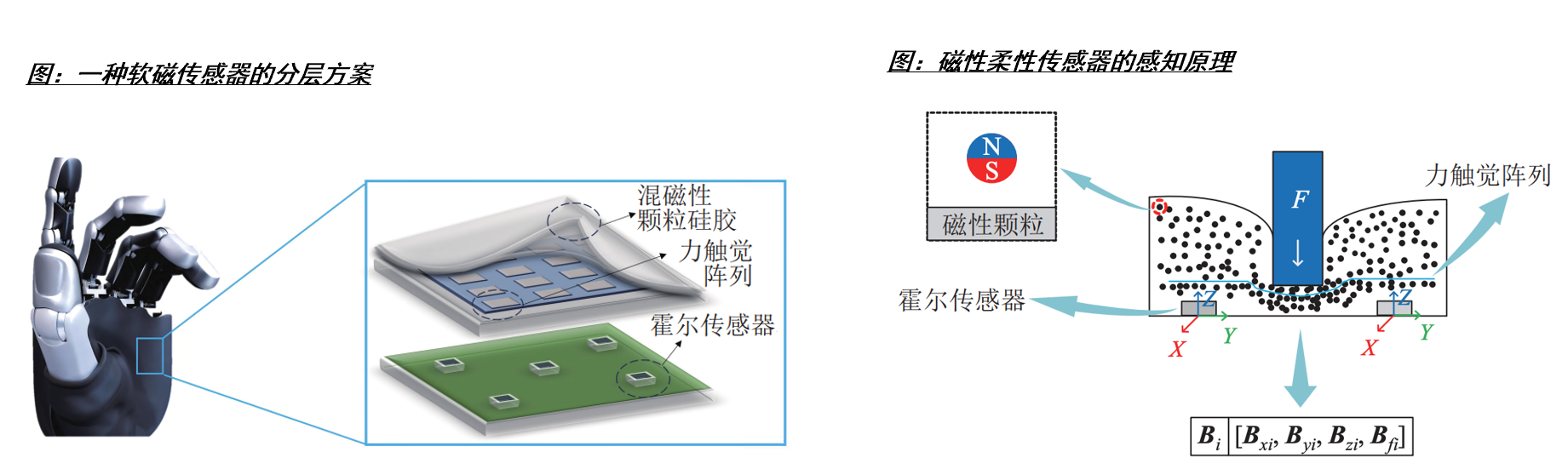
1.1.9 触觉传感器分类:基于磁感原理的柔性触觉传感器
相较于前文所述,压电式、压阻式等平面分布式阵列传感器是由单类型或多类型的传感器组成的平面分布式阵列,存在的共同缺点为:1)可以获取的数据维度有限;2)搭载多种类型传感器容易导致结构复杂、集成度低;3)采集到的不同模态触觉信息存在时间空间不匹配的时滞性问题。
搭载霍尔传感器的磁性传电子皮肤可以解决这一问题:全表面连续感知+分层式结构,在一个感知层上实现两种异质的触觉信息的同时收集,提高集成度,减少时间和空间上的时滞差。
磁性电子皮肤的原理:在形变性能良好的弹性材料中混入磁性微粒,与被感知对象进行触觉接触时,弹性材料会发生形变使得磁性微粒发生位移,内部磁场发生独特变化,实现全表面连续感知,可以通过在弹性材料下方均匀排布的5个霍尔传感器,感知3个维度的磁场变化。
资料来源:彭欢等《面向机器人交互识别的抗干扰多模态柔性电子皮肤》
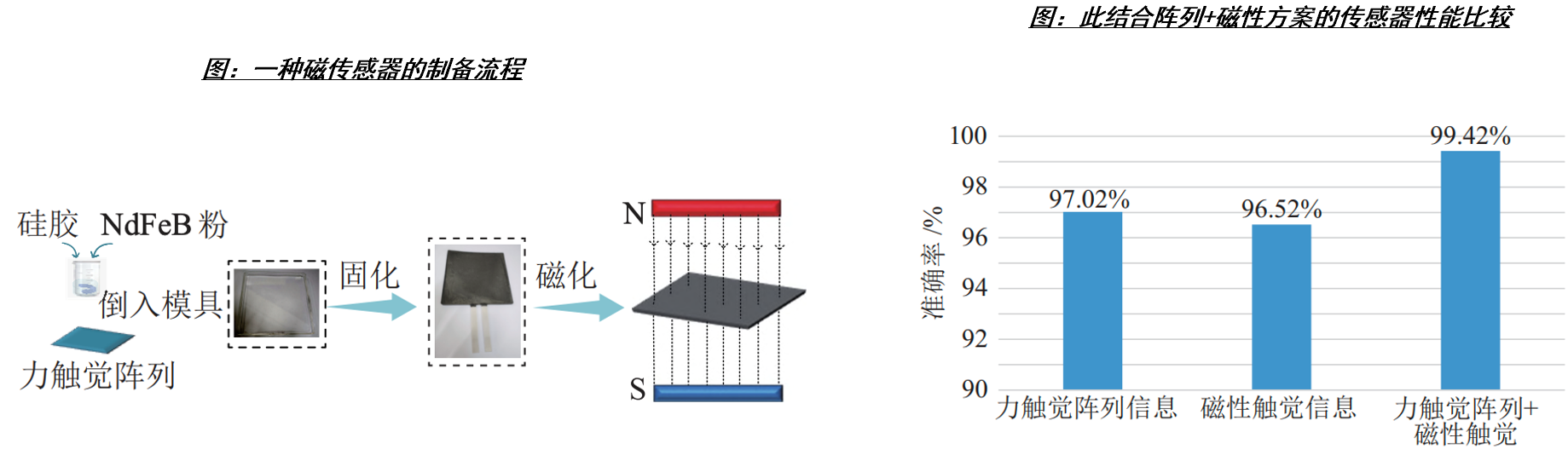
磁性传感器的主要缺点在于测量结果会受磁场的影响。通过多种方法,可以提高磁性触觉传感器的抗磁性干扰能力,下文将介绍一种多模态集成式磁性触觉传感器,减少磁场对测量结果的影响。
制备工艺:核心在于创新的触觉传感层的制备,如,将液态硅胶和磁性颗粒(钕铁硼磁性颗粒等)充分混合和静置,在定型模具中以一半混合物-分布式柔性触觉传感阵列-另一半混合物的顺序确定各层的位置,在室温环境下完成固化,最后放入充磁机进行定向磁化。通过这种方案,将混有钕铁硼磁粉的硅胶与分布式柔性触觉传感阵列一体成型,制备一种集成式的多模态力触觉感知层,可以在时间、空间上同步收集磁性触觉信息和力触觉阵列信息,减少磁场干扰,实现识别准确率达99.4%。
资料来源:彭欢等《面向机器人交互识别的抗干扰多模态柔性电子皮肤》
电磁式传感器基于霍尔效应研制。霍尔效应是指,将一块外接电源的导电材料,一般为半导体材料,放入与电流方向垂直的磁场中时,流动的载流子在磁场作用下发生偏移,在与磁场和电流垂直的方向上产生电势差。
霍尔式触觉传感器具有宽动态响应范围的优势,但通常需要较大的体积,并且容易受到外界杂散场噪声的影响。
资料来源:顾一丁《智能感知机械手柔性触觉传感器的研究》
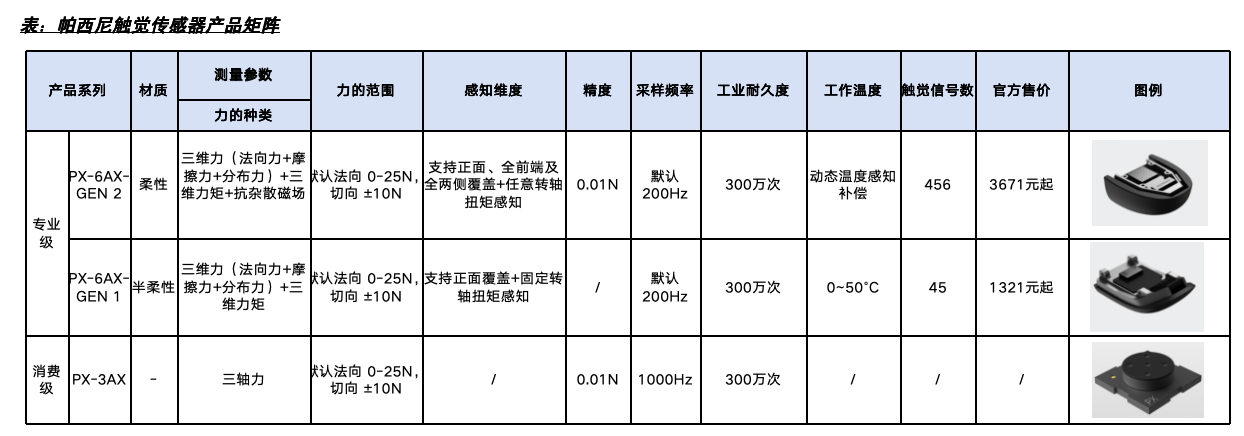
1.2.1 灵巧手触觉应用-帕西尼感知:一种基于磁性原理的触觉传感器方案
ITPU多维度触觉传感技术:帕西尼自主研发的多维度触觉传感技术,为机器人提供易用且丰富的触觉信息,进行毫秒级决策和复杂场景中的精准柔性操控。
商业化情况:官网已有三代触觉传感器产品,其中,专业版GEN 2和GEN 1分别采用柔性和半柔性设计,迭代后的GEN 2升级为多点面阵式测量维度,并加入了抗杂散磁场干扰。
资料来源:顾一丁《智能感知机械手柔性触觉传感器的研究》
帕西尼第二代多维触觉灵巧手DexH13 GEN2采用多维触觉+AI视觉双模态能力,搭载1956颗自研ITPU多维触觉传感器,最高可以实现7824路触觉信号解析能力。视觉方面,集成800万高清AI手眼相机,基于零样本位姿估计视觉算法,实现AI视觉物体位姿估计。
1.2.2 灵巧手触觉应用-戴盟机器人:一种光学式传感器方案
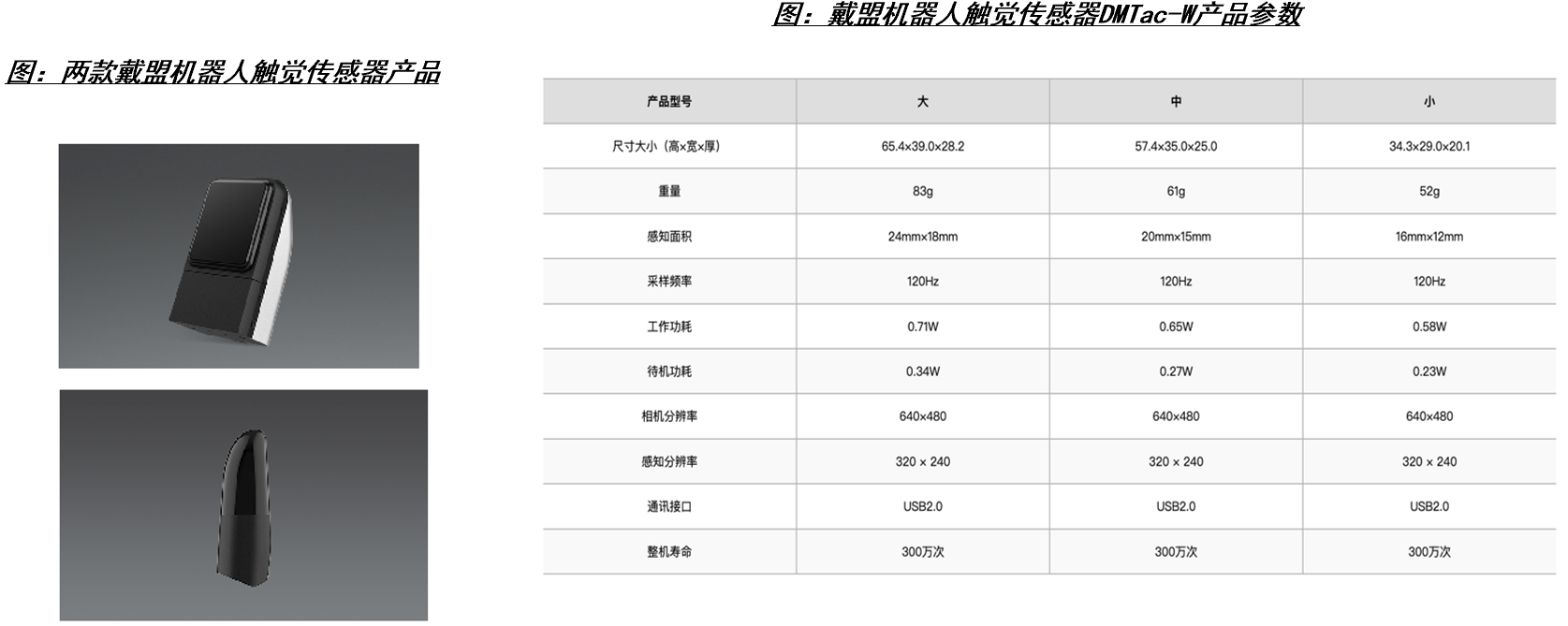
戴盟机器人研发毫米级厚度视触觉传感器,将传感器厚度从厘米级缩小至毫米级,能够放置于灵巧手的手指内部。
根据36氪pro公众号资讯,戴盟机器人的视触觉传感器产品触觉分辨率可达640×480和1280×960像素级,单位面积内几十万个触觉感受器。对比之下,人类手指指尖每平方厘米皮肤约有2400个触觉感受器,而传统的阵列式触觉传感器每平方厘米内分辨率通常在几乘几。
目前公司提供两款通用型的触觉传感器产品,包括适用于抓夹的DMTac-W和适配灵巧手的DMTac-F,均有大中小三种型号,感知面积分别为24mm×18mm、20mm×15mm、16mm×12mm,搭载相机分辨率为640×480。
1.2.3 灵巧手触觉应用-他山科技:触觉传感器+触感芯片+触感算法供应商
公司自研触觉传感器,可以实现高精度三维力实时感知+材质识别+接近觉感知,同时通过自研的数模混合AI触感芯片及触觉感知算法解决了触觉多维感知信号同时解析的难题,实现了多触觉传感单元的动态协同感知;2023年,公司的“视触觉融合的自适应抓取灵巧手”入选2023全球数字经济大会成果发布会“产业创新成果”。
产品:包括TS-F+多模态触觉传感器、TS-F指尖触觉传感器、TS-E机械手触觉传感器、TS-V视触融合技术平台、TS-ES具身安全防护等多款产品,其中,TS- F+多模态触觉传感器可以30+不同材质识别和大于等于2cm的空间感知维度。
生态伙伴包括BrainCo、灵心巧手、睿尔曼智能、因时机器人等。
1.2.4 灵巧手触觉应用-途见科技:专注电子皮肤,兆威机电战略合作伙伴
途见科技:兆威机电战略合作伙伴,专注于多模态柔性可拉伸触觉传感系统(电子皮肤)、集成电路、芯片的研发和制造,我们认为公司可提供压电式等触觉传感器,通过集成相应的传感器,在柔性基底上集成多种触觉传感模块,其中包括对压应力、切应力、材料表面纹理和温度的感应。
产品:此处介绍公司的一种公开专利,通过压电传感器方案,实现对触摸物品表面纹理和压力的双重传感测量。
测量原理:通过接触震动产生表面纹理的特征信号;通过接触后的形变使敏感压力传感器产生信号,实现力的测量。
传感器结构:两层,1)第一层:表面纹理传感器。包括接触组件和压电薄膜,接触组件与压电薄膜贴合;2)第二层:压力传感器。包括介电材料组件和电路板,介电材料在接触组件侧,电路板在压电薄膜侧。
资料来源:途见科技《柔性触觉传感器、电子皮肤及仿生设备发明专利申请》,国海证券研究所
1.2.5 灵巧手触觉应用-能斯达:一种新型压电式柔性传感器
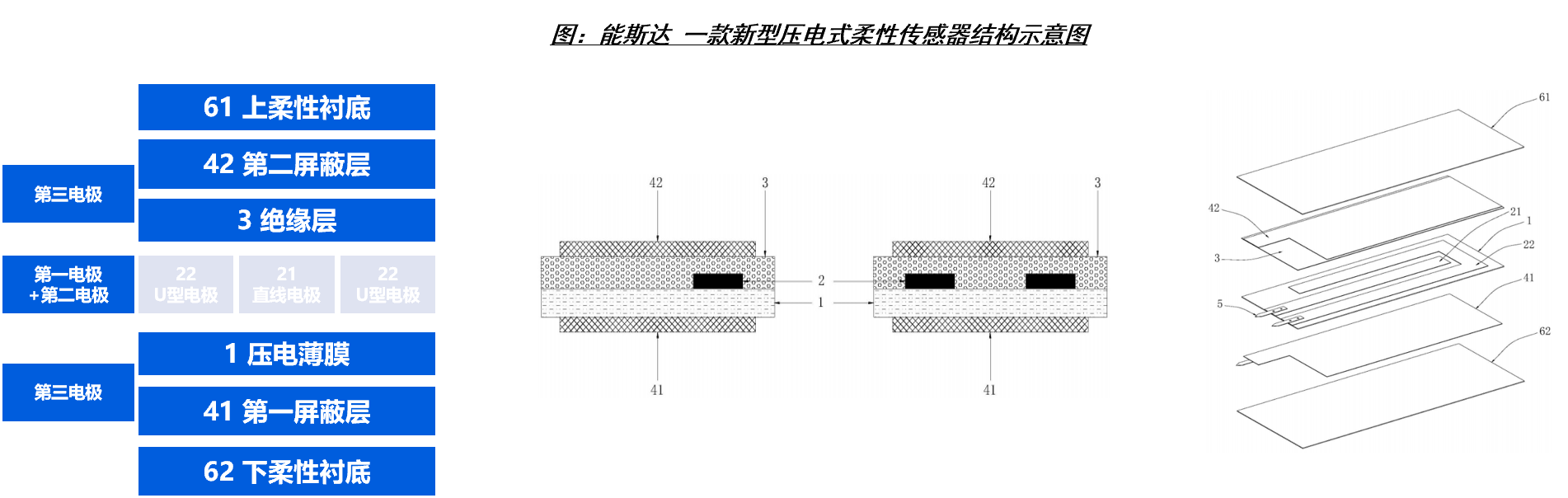
能斯达实用新型在柔性压电薄膜单面上制作电极层,优点:1)节省工艺上的时间,解决了上下两面制作电极对准困难的问题;2)有利于整个传感器结构的轻薄化;3)电极层可采用多种图案,通过增大电极材料与压电薄膜的接触面积,进一步提高传感器的感应区。
产品结构:参照中间示意图,自上而下顺序为:42第二屏蔽层,3绝缘层,2覆盖电极层,1压电薄膜,41第一屏蔽层;参照右侧示意图,最外侧的上下表面还分别设置有61上柔性衬底和62下柔性衬底作为其上下端的保护层、并将其包裹,只露出用于电信连接和信号传输的5接线端子。其中,电极层包括21直线型电极和21两侧的22U型电极,直线型电极21布置在U型电极U形口内围。
创新点:所述压电薄膜一面设置有一条独立的21直线型电极,形成第一电极;另设置一条独立的22U型电极,形成第二电极;第一屏蔽层和第二屏蔽层分别在压电薄膜的上表面或下表面重合且电性搭接形成第三电极。
资料来源:能斯达《一种新型柔性压电传感器实用新型专利》,国海证券研究所
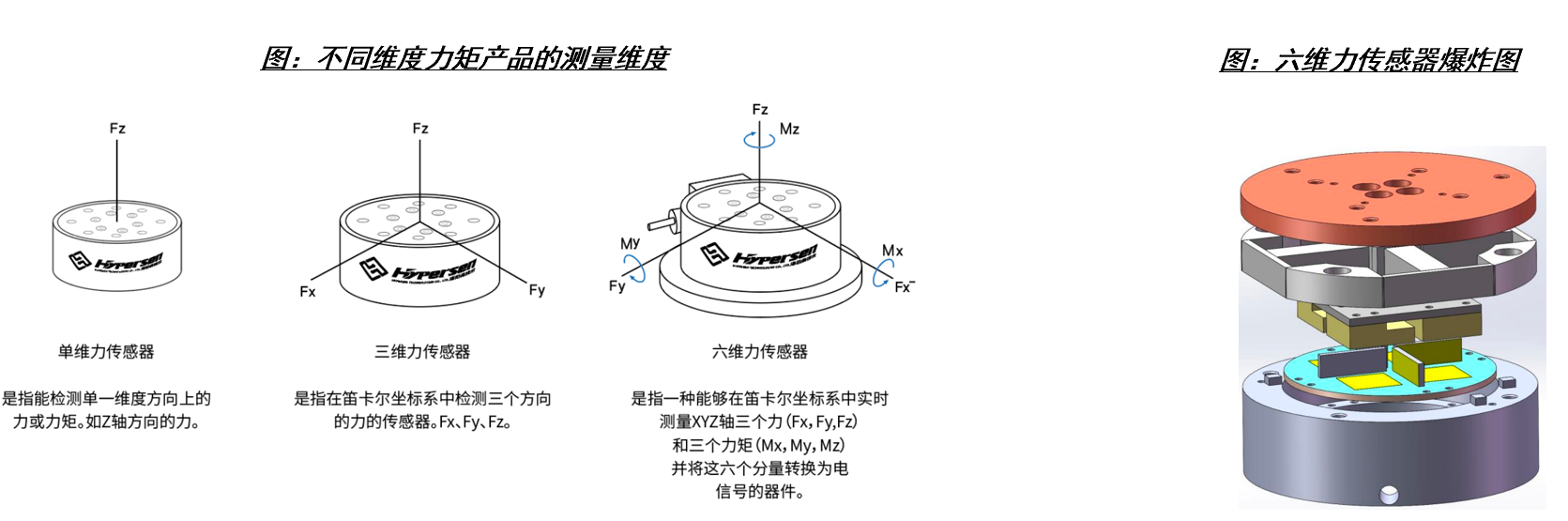
力矩传感器:可应用于工业机器人领域,实现末端执行器的精确控制,实现机械臂的“触觉”功能,感知并测量全部的空间力学信息。根据测量力的维度,可以将力矩传感器分为单维力、三维力和六维力。其中,单维力、三维力可以通过上文所述的触觉传感器实现。
六维力传感器:六维力传感器是可以测量三个方向的力和三个力矩的力矩传感器。一个完整的六维力传感器结构包括顶板、弹性体、接地板、传感器板、信号处理板和底座,其中弹性体是六维力传感器的核心部件。
资料来源:刘涛《针对智能假肢的六维力传感器设计与标定技术研究》,海伯森科技官网
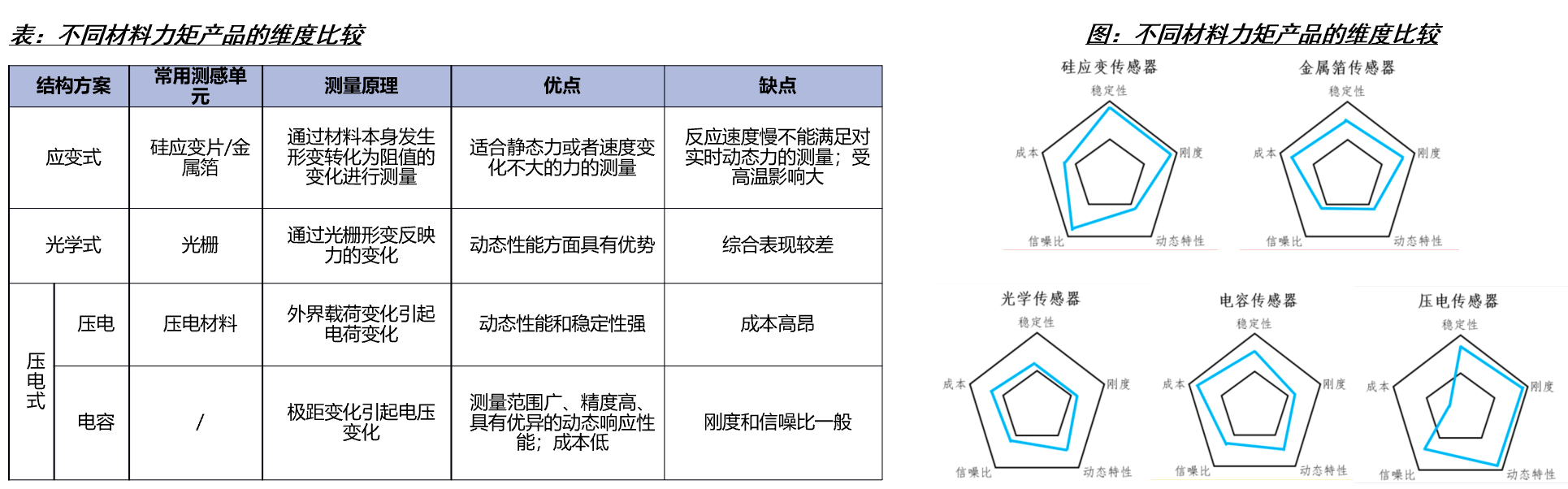
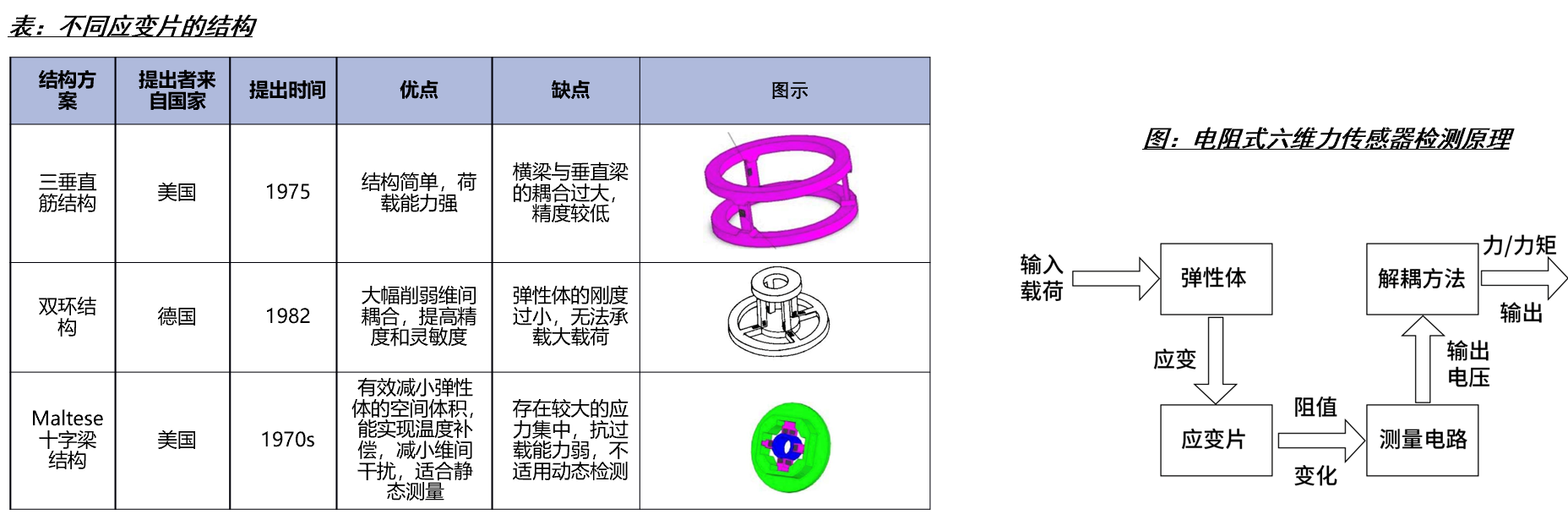
根据感测原理的不同,可以将六维力传感器分为应变式(硅应变片/金属箔应变片)、光学式和压电式(压电/电容)。
性能比较:通过对比稳定性、成本、信噪比、动态性能和刚度五个维度,硅应变和金属箔传感器相比,两者刚度类似,成本上金属箔占优,硅应变在稳定性和信噪比方面更优;电容和压电传感器相比,电容传感器成本更低;光学传感器在动态性能方面具有优势。
在传感器外形尺寸不变的情况下,可以通过改变传感器的电容结构和弹性体来实现测力范围、精度和分辨率等测量指标调整,如,通过选择强度更高的弹性体材料以提高测力范围,通过软件优化弹性体结构降低降低传感器重量而提高测量精度,通过强度更高的材料+软件优化弹性体结构同时提高测力范围和精度。
资料来源:刘涛《针对智能假肢的六维力传感器设计与标定技术研究》,国海证券研究所
弹性体是六维力传感器的核心元件,其结构的设计对六维力传感器的精度、灵敏度、维间耦合、动态性能等关键性能参数起着重要作用。十字梁式的结构具有对称性,可以测量水平和竖直方向的结构应变,因此被广泛使用一直沿用至今。
运作原理:通过弹性体上的应变片和应变效应原理,可以检测力或力矩引起的微小形变,从而进行电路的测量和力矩的输出。
资料来源:韩明《灵巧手指尖六维力传感器的设计》,刘涛《针对智能假肢的六维力传感器设计与标定技术研究》,国海证券研究所
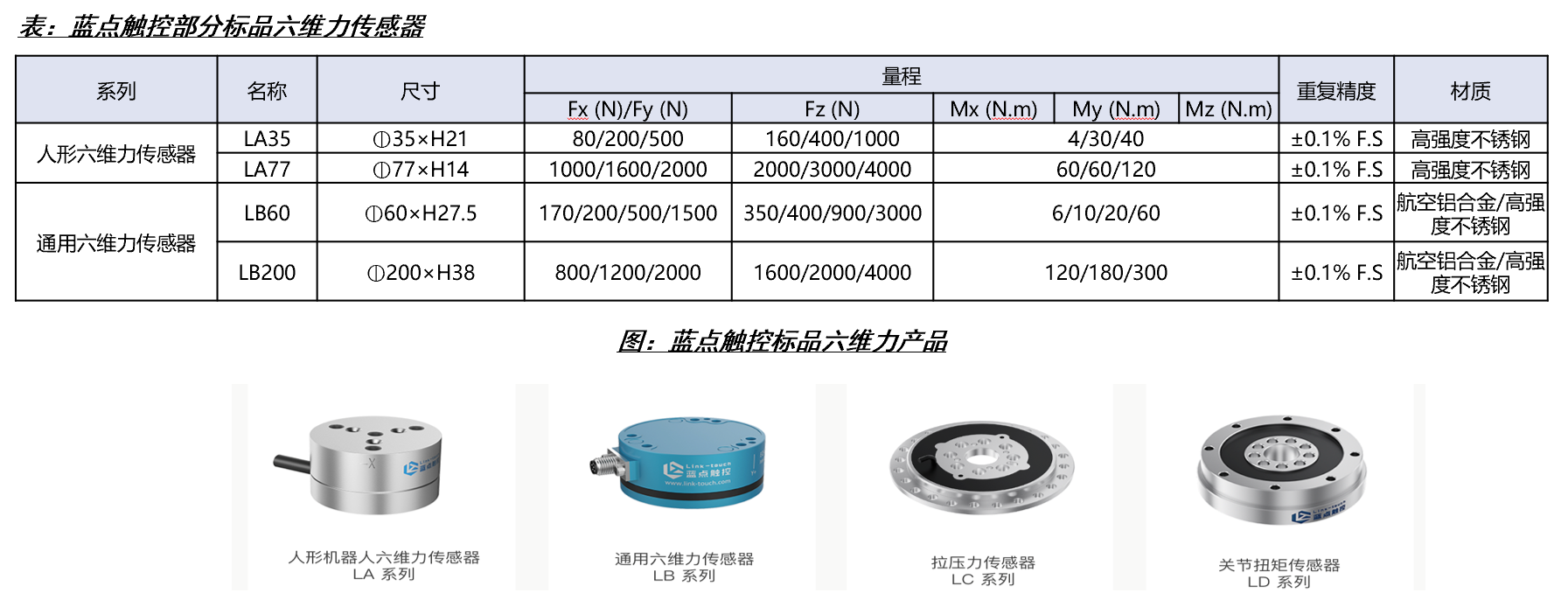
应用于灵巧手的六维力传感器需要具有体积小,灵敏度高、力学特性好的特征,放置位置可以在指尖的内部,六维力传感器的外部封装结构为柱体,底部有四个螺纹孔,可与指尖背部连接,顶部与指尖连接,以检测外力。其设计的难点之一在于弹性体需要保证在尺寸相对较小的空间内完成对各向力/力矩的精准检测。
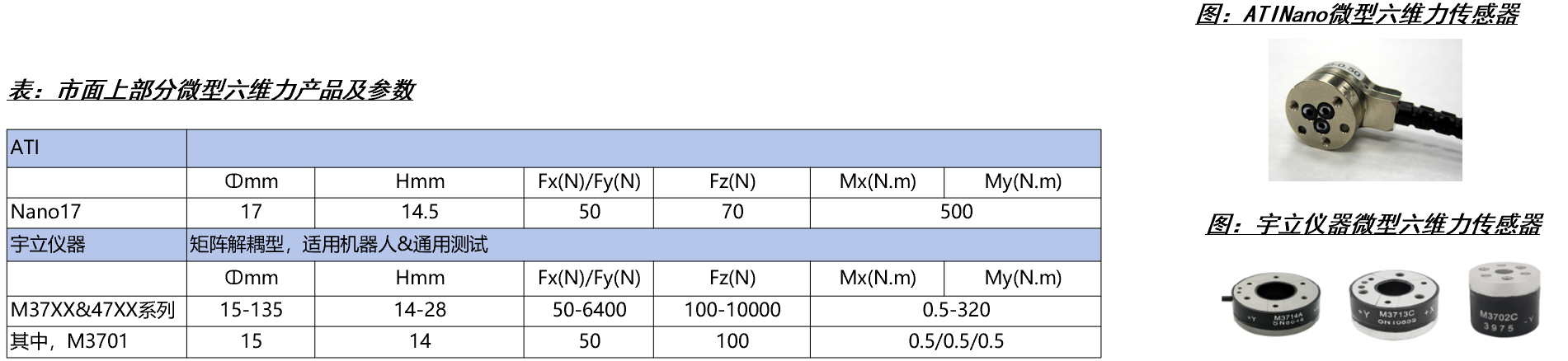
微型六维力传感器的难度在于:1)指尖高度集成带来的小型化需求:对于常见的电阻应变片式传感器,由于检测六个维度的力/力矩,使用贴片较多,尺寸较大,而灵巧手指尖内部空间狭小,导致机械装配的难度较大,难以实现六维力传感器的小型化设计;2)依靠算法解决耦合问题:目前小型多维力传感器的弹性体多采用十字横梁结构,这种结构在机械设计层面不能消除维间耦合,需要依靠算法实现维间解耦。
ATI公司提供多轴力/力矩传感器系统,其中,最小的六维力传感器产品nano17直径为17mm,高度14.5mm,最小测力值可达0.318克力,可以适用于机械手研究。
资料来源:ATI官网,宇立仪器官网,国海证券研究所
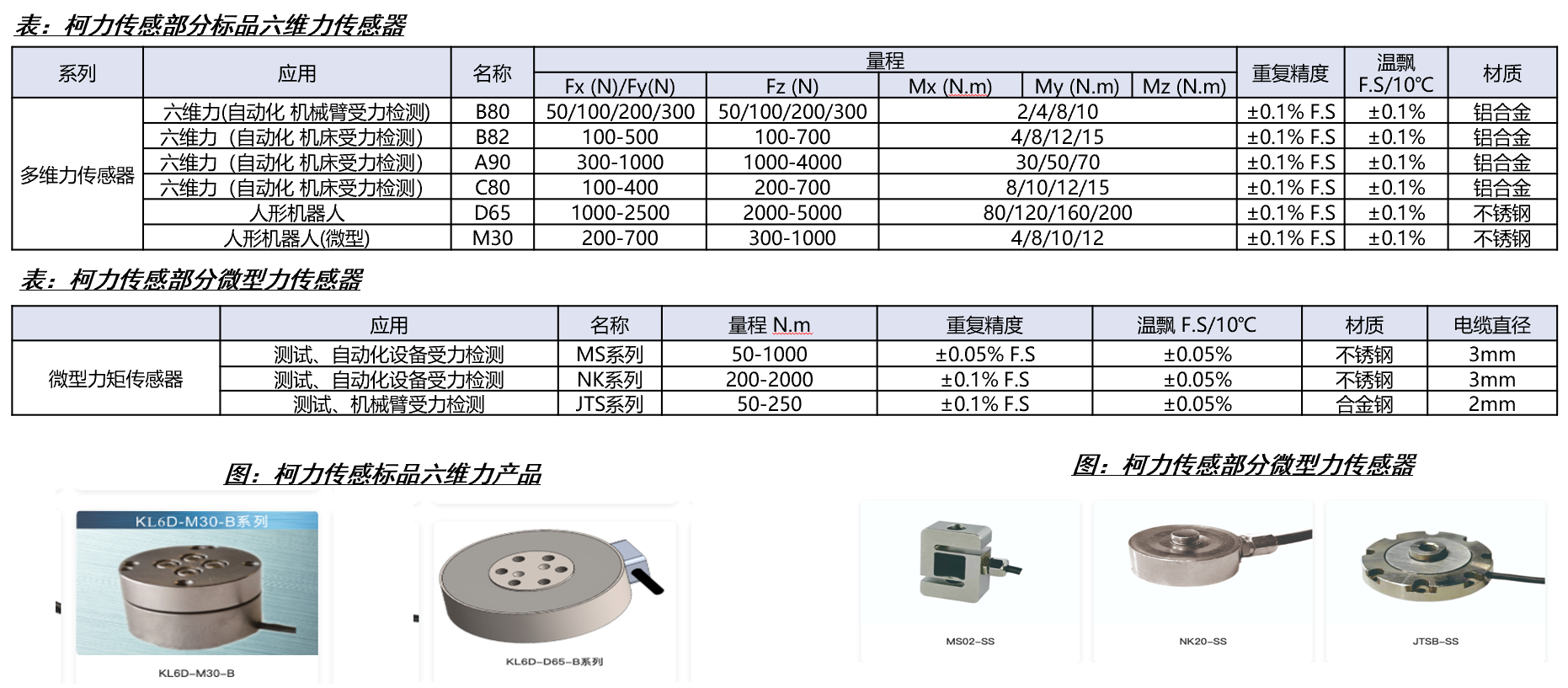
柯力传感:提供微型力矩传感器(非六维力)、六维力传感器、关节力矩传感器等产品,合作下游机器人公司包括桃子自动化、德壹机器人和开普勒,覆盖智能装备、工业机器人、理疗机器人、人形机器人等场景。
提供微型六维力传感器产品(⦶15mm)和多种解耦工艺(矩阵式解耦/算法解耦等)。
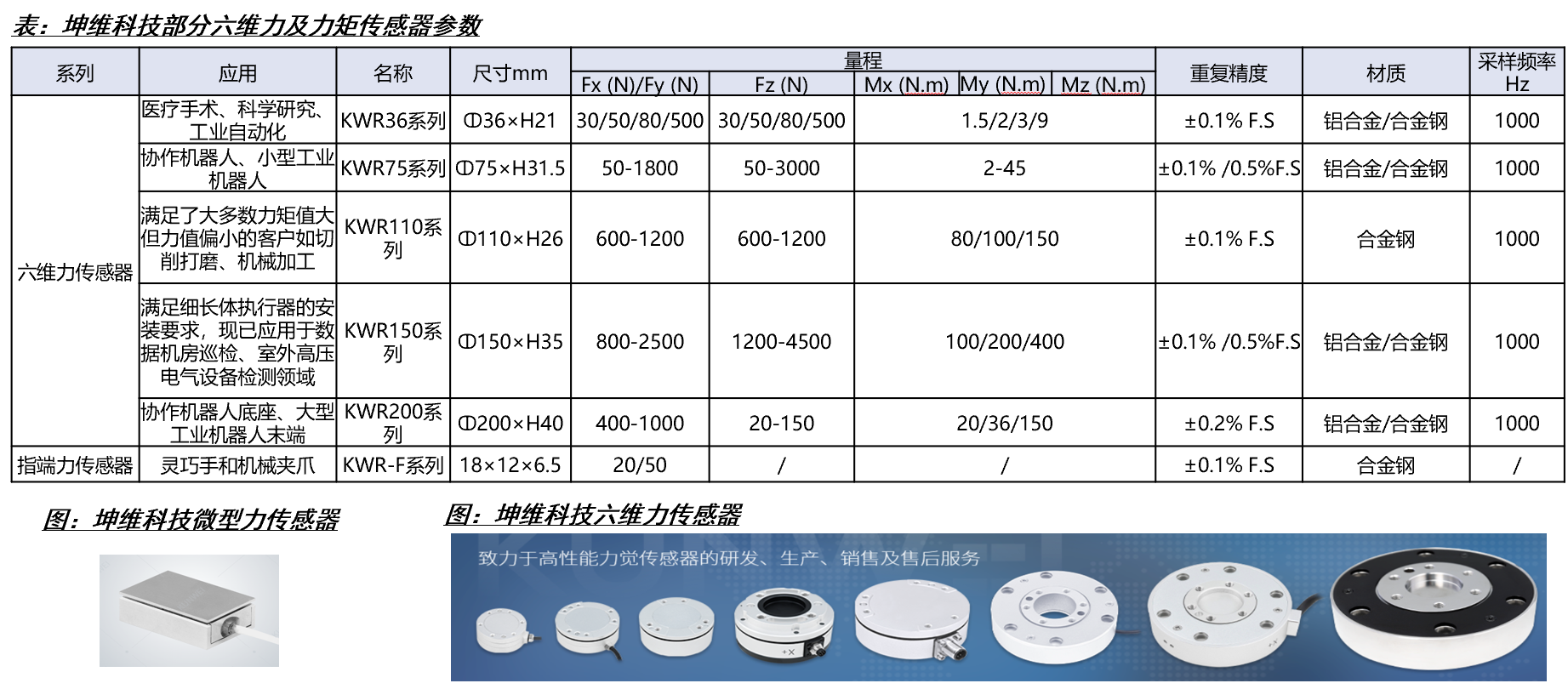
根据坤维科技公众号,公司的六维力传感器产品从30mm直径到200mm直径,量程范围涵盖20N~20KN,可基本覆盖人形机器人、协作机器人和小负载六轴工业机器人的应用场景。
提供机器人力传感器硬件、力控算法、行业工艺算法,核心部件已全部实现国产化,已形成包括Wrist六维传感器、Joint关节扭矩传感器、力控工艺应用软件包等多个产品系列。 解耦算法包括深度整合柔性力控算法与工艺算法。
资料来源:各公司官网,中国传动网,因时机器人公众号,机器人大讲堂公众号,高工机器人,OYMotion公众号,36氪Pro公众号,国海证券研究所
我们维持灵巧手所在的人形机器人行业“推荐”评级。我们认为人形机器人目前处于技术突破、商业化落地初期,建议关注:1)电机:兆威机电、鸣志电器等;2)腱绳及材料:南山智尚、大业股份等;3)传感器:柯力传感等;4)柔性皮肤:汉威科技等;5)微型丝杠及驱动器:恒立液压、汇川技术、信捷电气等。
资料来源:各公司公告,各公司官网,wind,国海证券研究所
1)人形机器人行业进展不及预期风险:人形机器人行业硬件技术及软件技术(大脑及大模型、小脑及运控技术等)发展低于预期,将对人形机器人技术成熟的速度、后续商业化落地和放量节奏产生不利影响;
2)中美贸易摩擦超预期风险:若美国对人形机器人中国配套供应链厂商加强技术封锁和关税限制,将对机器人国产产业链中的企业技术革新造成不利影响,增加关税负担、经营成本和海外供应链不稳定性等;
3)灵巧手核心技术迭代不及预期的风险:当前各家公司灵巧手的技术路径存在较大差异,存在驱动方案、传动方案等多种路径,最终的技术路线仍未确定;
4)重点关注公司业绩不及预期风险:灵巧手未来技术路线不确定性大,放量时间节点未确定,存在前期投入成本难以收回的风险;涉及上游零部件供应商众多,行业竞争较为激烈;
5)报告中使用的公开资料滞后性风险:人形机器人行业技术方案多样,迭代速度快,研究报告中使用的公开资料可能存在信息滞后或更新不及时的风险。
证券研究报告:《灵巧手专题系列报告2:传感器:从第一性原理出发,灵巧手如何获得多模态“感觉”》
分析师承诺:本报告中的分析师均具有中国证券业协会授予的证券投资咨询执业资格并注册为证券分析师,以勤勉的职业态度,独立,客观的出具本报告。本报告清晰准确的反映了分析师本人的研究观点。分析师本人不曾因,不因,也将不会因本报告中的具体推荐意见或观点而直接或间接收取到任何形式的补偿。
本公众号推送观点和信息仅供国海证券股份有限公司(下称“国海证券”)研究服务客户参考,完整的投资观点应以国海证券研究所发布的完整报告为准。若您非国海证券研究服务客户,为控制投资风险,请取消订阅、接受或使用本公众号中的任何信息。本公众号难以设置访问权限,若给您造成不便,敬请谅解。国海证券不会因订阅本公众号的行为或者收到、阅读本公众号推送内容而视相关人员为客户。
本公众号推送观点和信息仅供国海证券股份有限公司(下称“国海证券”)研究服务客户参考,完整的投资观点应以国海证券研究所发布的完整报告为准。若您非国海证券研究服务客户,为控制投资风险,请取消订阅、接受或使用本公众号中的任何信息。本公众号难以设置访问权限,若给您造成不便,敬请谅解。国海证券不会因订阅本公众号的行为或者收到、阅读本公众号推送内容而视相关人员为客户。
本公众号不是国海证券的研究报告发布平台,只是转发国海证券已发布研究报告的部分观点,订阅者有可能会因缺乏对完整报告的了解或缺乏相关的解读而对资料中的关键假设、评级、目标价等内容产生理解上的歧义,应以国海证券研究所发布的完整报告为准,且须寻求专业人士的指导及解读。
本公众号及国海证券研究报告所载资料的来源及观点的出处皆被国海证券认为可靠,但国海证券不对其可靠性、准确性、时效性或完整性做出任何保证。本微信号推送内容仅反映国海证券研究人员于发出完整报告当日的判断,本公众号所载的资料、意见及推测有可能因发布日后的各种因素变化而不再准确或失效,国海证券不承担更新不准确或过时的资料、意见及推测的义务,在对相关信息进行更新时亦不会另行通知。
在任何情况下,本公众号所载信息、意见不构成对任何人的投资建议,所述证券或金融工具买卖的出价或征价,评级、目标价、估值、盈利预测等分析判断亦不构成对具体证券或金融工具在具体价位、具体时点、具体市场表现的投资建议。对任何直接或间接使用本公众号所载信息和内容或者据此进行投资所造成的任何一切后果或损失,国海证券及/或其关联人员均不承担任何形式的法律责任。
本微信号及其推送内容的版权归国海证券所有,国海证券对本微信号及其推送内容保留一切法律权利。未经国海证券事先书面许可,任何机构或个人不得以任何形式转载、翻版、复制、刊登、发表、修改、仿制或引用本订阅号中的内容,否则将承担相应的法律责任,国海证券就此保留一切法律权利。
来源:钰莹机械研究
https://mp.weixin.qq.com/s/1ud831ZzZf0LsKxPSicnlw?scene=1&click_id=2

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群