
触觉对于我们与环境进行物理交互至关重要,例如在社交互动中与他人的接触。在机器人领域,触觉反馈对于复杂的精密操控任务以及安全的人机交互不可或缺。因此,开发坚固、可定制的触觉传感器是一项重要任务,有望推动机器人在安全性、交互性和操控能力方面的进步。
多年来,研究人员开发了多种触觉传感器,它们依赖于电容式传感单元、电阻丝和压电材料等多种技术。然而,该领域普遍缺乏廉价且可定制的触觉传感器,这阻碍了机器人触觉应用研究的推进。我们旨在开发此类触觉传感器,并通过软机器人工具包等开放资源使其普及。
我们的传感器具有柔性,其柔顺的模块化尖端可保护敏感电子元件免受与物体的物理接触。研究表明,将柔顺传感器集成到机器人夹爪中还能改善抓取效果。开发柔性传感器也是实现安全舒适的人机交互的关键。
多材料3D打印技术的进步使研究人员能够快速原型制造机器人手和传感器,这些设备具有集成的柔性表面,可实现柔顺、自适应且带传感功能的操控。近期在柔性3D打印触觉传感器应用方面的研究(例如触觉超分辨技术的演示),将这类设备的应用范围从原型扩展到实用的工作版本,其材料和形态能够快速、便捷且低成本地适配不同的实际应用场景。
本研究旨在展示一组通过3D打印制造、具有多种形态的柔性传感器,包括通过对原始浇铸尖端版本进行连续改进而得到的触觉指尖传感器(TacTip)(图1)。TacTip8是布里斯托尔机器人实验室(BRL)开发的一种低成本、坚固的 3D 打印光学触觉传感器,其设计灵感来源于人类指尖。我们还介绍了 TacTip-M2、TacTip-GR2 和 TacCylinder(图 2),这些传感器更具类皮肤特性,其制造得益于多材料 3D 打印技术,分别设计用于集成到两指夹爪和胶囊内窥镜中。
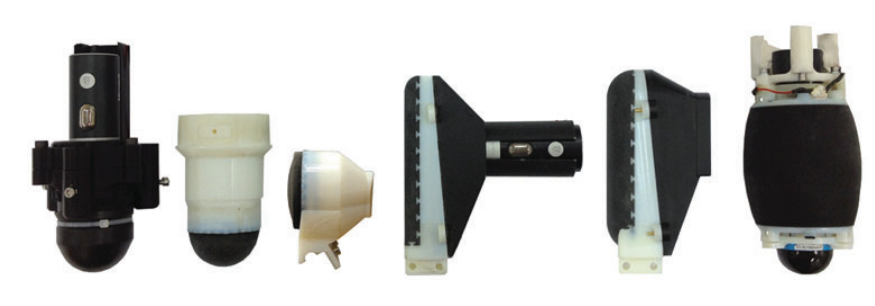
图1:TacTip项目传感器。从左到右:开放式TacTip(原始版本)、TacTip(改进版本)、TacTip-GR2、TacTip-M2(扁平型)、TacTip-M2(圆形)和 TacCylinder
图2:集成到M2开放式夹爪模型中的TacTip-M2(左)、安装在GR2夹爪上的TacTip-GR2(中)以及在模拟肿瘤检测实验中的TacCylinder(右)
我们已将开放式TacTip开源,为其他研究机构提供采用和适配我们传感器设计的机会,例如像我们开发TacCylinder那样创建不同的形态。传感器设计还可修改以集成到机器人手上,TacTip-M2(前身为TacThumb)10和TacTip-GR2 就是很好的例证。 本文首次对我们的柔性传感器系列进行了对比研究,所有传感器均具有极高的精度,能够以亚毫米级精度定位物体,展现出超分辨灵敏度。TacTip系列传感器的高性能表明,类似的设计有望催生出一系列新型柔性复杂触觉传感器,从触觉皮肤区域到触觉足部和探针等多种形态。
相关技术 大多数触觉传感器都是柔性的,至少包含一些柔顺元件,并依赖于多种底层技术(例如应变片、气压式、电容式、压阻式、压电式等)来传输和记录触觉信息。本文将重点回顾与我们的TacTip系列传感器最相关的现有柔顺光学触觉传感器。 乍看之下,Optoforce力/扭矩传感器的设计与TacTip较为相似,这基于其整体形状和设计理念。然而,Optoforce仅用于计算接触的总力和扭矩,而非传递包含传感表面上传感器阵列读数的触觉信息。力/扭矩传感与人类触觉不同,对于需要比力向量更多信息的任务(如多触点传感)而言并不适用。 TacTip的早期雏形采用了带有黑色圆点图案的模制透明圆顶。然而,利用环境光对圆点进行成像存在诸多缺点,包括在遮挡环境光的物体上对比度不足,以及难以自动跟踪圆点;此外,该设计在不同光照条件下难以对触觉元件进行图像识别。 另一种基于光学原理的触觉传感器是GelSight传感器,它利用彩色光和光度立体视觉技术重建其表面的高精度形变。该传感器分辨率高、材料成本低,且可制成便携式设备。尽管在许多方面它都是一款出色的低成本光学触觉传感器,但目前它需要平坦的表面,将其适配到更复杂的形态(如圆顶形指尖)仍面临挑战。GelForce传感器也存在类似问题,其传感表面是平坦的弹性体垫。 其他例子包括采用光波导方法的触觉传感器,或在柔性皮肤内表面绘制圆点或线条图案并通过CCD相机跟踪的传感器。一些传感器还利用光纤将光强传递到相机,使传感器的接触面积可以做得非常小,非常适合医疗应用。 所有触觉传感器都有其优缺点,最终的最佳选择取决于具体应用场景。尽管如此,TacTip与上述传感器之间的一个重要区别在于其传感表面附有物理针;这些结构模拟了人类指尖内的中间脊,为传感器设计提供了仿生基础,具体如下所述。 设计灵感 当人类手指与物体或表面接触时,皮肤的表皮层会发生形变,这种变化由机械感受器检测并传递。Chorley等人受到人类无毛皮肤(如手掌和脚底的皮肤)特性的启发。他们在先前研究的基础上发现,默克尔细胞复合体感觉感受器与中间脊的形态协同工作(图3),能够对接触表面进行边缘编码。TacTip设备旨在复制这种响应,其柔性类皮肤膜的下侧设有内部针,以替代中间脊,同时通过内部相机进行光学针跟踪,替代传感表面的机械传感转换(图4)。 图3:人类皮肤中的中间脊(左)与TacTip中的对应针(右)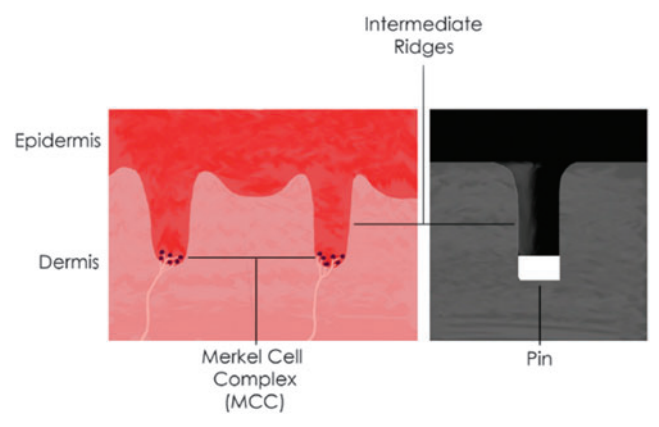
这种仿生灵感近期得到了扩展,研究人员探索了人工指纹在TacTip触觉传感中的作用。在该研究中,TacTip皮肤上由一系列外部结节组成的人工指纹被证明能够增强高空间频率检测能力。这一发现表明,在仿生指尖中加入人工指纹将改善其执行触觉任务的能力,如边缘感知、轮廓跟随和精细特征分类,对物体感知和触觉操控具有潜在意义。 发展历程 本节重点介绍TacTip传感器的发展过程(图4)。 图4:开放式 TacTip(左):传感器的原始版本包括3D打印的相机支架和底座,以及浇铸的硅橡胶皮肤。改进型TacTip(中):重新设计的底座容纳了重组的网络摄像头,模块化尖端带有3D打印的橡胶皮肤。模块化尖端(右):带有结节状指纹的独立模块化尖端(上)和扁平尖端(下)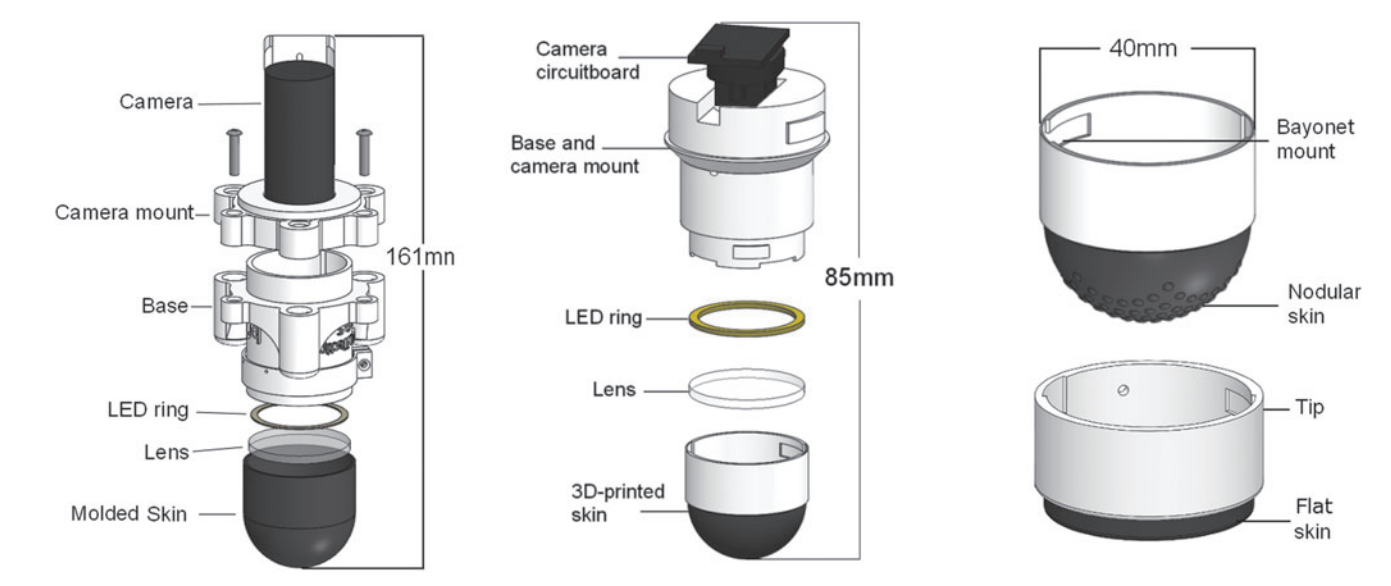
原始TacTip是一种柔性、坚固且高灵敏度的传感器,采用仿生方法实现主动感知。该传感器已被证明能够实现40倍的定位超分辨,并成功在圆柱滚动任务中执行触觉操控。 为了将TacTip集成到3D打印机器人手和夹爪中,研究人员进一步开发了TacTip-M2和TacTip-GR2传感器,分别集成在M2夹爪和GR2夹爪上。这些由耶鲁大学GRAB实验室开发的开源机器人手,为研究人员利用TacTip传感器进行手部触觉操控研究提供了可能。 专为胶囊内窥镜设计的TacCylinder是TacTip设计的另一种适配版本,它扩展了TacTip传感器可处理的任务范围。 因此,TacTip是一种极具价值的研究工具,具有成本低、坚固耐用和适应性强等优点。它填补了当前领域在廉价、柔顺、可定制触觉传感器方面的空白,可应用于工业机器人、医疗机器人和机器人操控等多个领域的挑战。
开放式TacTip 在开放式TacTip的原始版本中,底座、相机支架和尖端的刚性部分通过3D打印制造,皮肤采用VytaFlex 60硅橡胶浇铸而成,针尖则通过手工精心涂成白色。尖端内部填充有光学透明的硅凝胶(Techsil公司,RTV27905型号)。在开放式TacTip的制造过程中,重点强调传感器的低成本、制造简便性和组装便捷性。 为了增强开放式TacTip的功能,我们对上述原始版本进行了一系列改进。这些改进旨在进一步降低成本、减小传感器尺寸、优化传感器精度,并使TacTip更易于使用和修改。改进型TacTip的主要改进如下所述。 TacTip(改进版本) 3D打印皮肤 与采用硅橡胶浇铸TacTip皮肤不同,我们使用Objet 3D打印机进行双材料快速原型制造,传感器的刚性底座采用硬塑料(Vero White),柔性皮肤采用类橡胶材料(Tango Black+)。这种方式省去了耗时的模具制作和皮肤浇铸/涂漆制造步骤,降低了成本并加快了新型TacTip皮肤原型的制作速度。特别是,Vero White材质的针尖现在直接打印在针的末端,无需再进行涂漆处理。不同类型的皮肤示例包括带有指纹的尖端和旋转对称的针布局。3D打印还提高了设计的可重复性。3D打印尖端的尺寸差异取决于3D打印机的精度。相比之下,浇铸尖端的皮肤是手工模制的,导致不同尖端的皮肤厚度存在差异。尽管人们可能认为3D打印皮肤的长期耐用性不如浇铸皮肤,但我们的3D打印皮肤经过数月的日常使用,性能并未出现明显下降。损坏通常是由人为错误造成的。 这种新的打印方法还为在传感器皮肤中添加复杂特征提供了可能。例如,我们添加了由橡胶结节组成的外部指纹,这些结节通过刚性内部塑料芯与白色针尖机械连接。这种复杂皮肤结构的制造得益于多材料3D打印技术,并且已被证明能够提高高空间频率下的感知灵敏度。 模块化设计 为了便于皮肤测试和优化,皮肤被打印成一个整体结构,附着在硬塑料外壳上(图4,右面板),形成一个通过卡口式连接与TacTip底座相连的尖端。因此,尖端(由皮肤、凝胶、透镜和塑料外壳组成)是传感器的模块化组件,可轻松更换或升级。通过这种方式打印尖端,可以以比以往低得多的成本生产和测试不同的针布局和尖端结构,以优化传感器性能。 我们将针布局更新为相机成像时呈正六边形投影的127根针,针间距规则,这比过去浇铸TacTip中使用的均匀测地线分布有所改进(图5)。这种设计在图像处理过程中提高了针跟踪算法的性能。我们还测试了不同的皮肤厚度和针长度,最终确定改进型TacTip(3°锥度)采用1毫米厚的皮肤和2.0毫米长的针,这在针的耐用性和偏转灵敏度之间取得了良好平衡。3D打印技术对于这些需要大量硬件测试的试错实验至关重要,最终促成了传感器设计的改进。 图5:TacTip系列传感器的原始图像。从左到右:改进型TacTip、TacTip-GR2、TacTip-M2和TacCylinder。TacTip使用微软Cinema HD网络摄像头拍摄针的图像,而TacTip-GR2使用树莓派间谍相机(Adafruit公司)和鱼眼镜头以减小传感器尺寸。TacCylinder使用折反射镜实现360°视觉
更紧凑的传感器 更紧凑的传感器不仅更易于在实际场景中部署,还便于集成到更多种类的机器人手和机械臂中。另一个重要优势是减少了传感器受到横向撞击时底座承受的扭矩,这对于长传感器来说是一个问题。因此,我们拆解了网络摄像头,仅保留关键组件,并将其电路板重新排列为水平布局(图4)。这缩短了传感器长轴方向的尺寸,使TacTip的高度减少了约一半(从161毫米降至85毫米)。底座和相机支架也整合为一个整体,简化了传感器的整体设计(图4,中面板)。这种传感器设计非常适合作为末端执行器安装在工业机器人臂上,这也是我们实验室研究触觉感知和控制的首选平台。 TacTip-GR2 TacTip-GR2是为集成到GR2夹爪而设计的TacTip版本,它结合了TacTip传感器的设计特点,同时减小了整体尺寸(44毫米;表1)。为了实现尺寸缩减,我们使用了更小的相机(适用于树莓派的Adafruit间谍相机)和鱼眼镜头替代了微软LifeCam HD网络摄像头。 表1:TacTip系列各传感器的针特性详情
该版本的TacTip保留了模块化尖端的针布局,但更扁平的皮肤组件在夹爪的手指之间创造了更多空间,使夹爪能够抓取更大的物体。 这种更扁平的皮肤(图4)导致传感器动态特性发生变化,体积更小的尖端减少了针的偏转,但增加了与扁平物体的接触表面积。 TacTip-M2 将TacTip的设计原理应用于M2开放式夹爪模型,我们开发了TacTip-M2,这是一种细长的触觉拇指(图6),适用于仅通过触觉反馈引导对物体进行手部灵巧操控。我们认为,触觉操控是使机器人能够在复杂、动态环境中有效与物体交互的关键组件。选择M2夹爪进行集成是因为它是3D打印且开源的,具有良好的抓取能力,并为研究一维简单触觉操控提供了机会。 与TacTip一样,TacTip-M2通过多材料3D打印制造,其皮肤内表面设有规则排列的针排。TacTip-M2有两个版本:原始版本适用于对尺寸无要求的场景(例如安装在机器人臂末端),改进的紧凑版本则经过重新设计,采用重新排列的网络摄像头和微距镜头,适用于集成到M2夹爪中。 图6:原始TacTip-M2(左)用于对尺寸无要求的场景,改进型TacTip-M2(右)更紧凑,设计用于集成到M2开放式夹爪中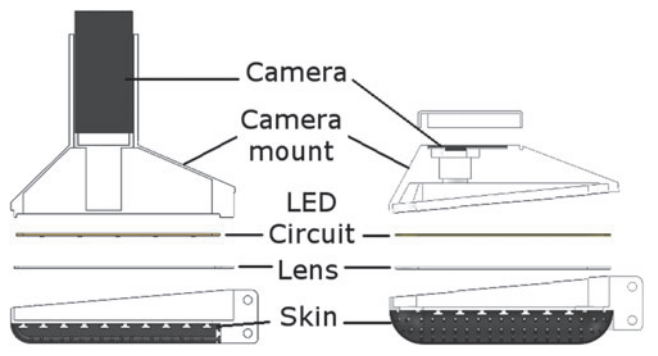
TacCylinder TacTip通过折反射镜系统进行适配,形成了360°圆柱形触觉传感表面(图7),即TacCylinder传感器。 图7:TacCylinder专为胶囊内窥镜设计。圆柱形设计包括3D打印的圆柱形皮肤和折反射镜系统,以实现360°触觉传感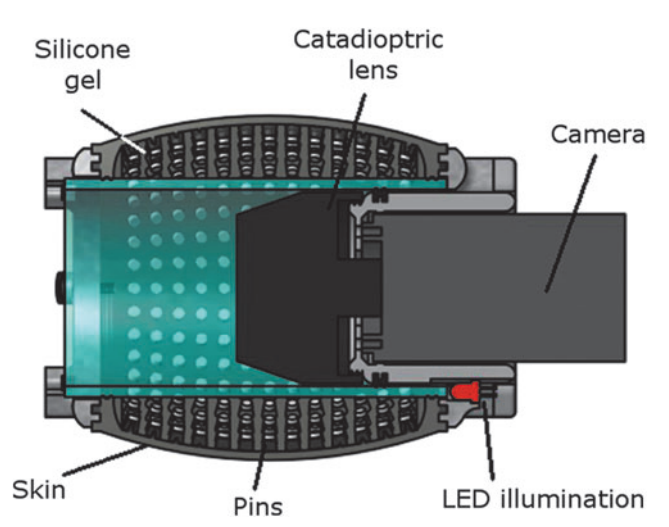
TacCylinder专为胶囊内窥镜设计,能够在胃肠道内提供远程触觉传感功能。胶囊内窥镜是一种类似药丸的技术,患者吞下后,它会在肠道内移动,通过视觉检查管腔是否存在可疑的健康问题迹象。 TacCylinder比TacTip更大,因此包含更多更大尺寸的针(表1)。其中心的管子容纳了相机和360°镜系统。传感器内部腔体填充光学透明硅凝胶的过程通过集成的3D打印O形圈式密封件得到进一步辅助。 实验装置与数据收集 为了验证感知性能,我们在相同的圆柱滚动任务中测试了TacTip、TacTip-GR2、TacTip-M2和TacCylinder传感器,以评估每种传感器的定位性能。请注意,为了方便起见,TacTip-GR2安装在标准TacTip主体上(图8)。选择该实验是因为它易于为所有触觉传感器设置,并且与传感器的各种设计、形态和用途兼容,从机器人手的操控任务到独立传感器与物体的接触。 图8:TacTip、TacTip-GR2、TacTip-M2和TacCylinder安装在ABB机器人臂上,直径25毫米的圆柱在72毫米范围内滚动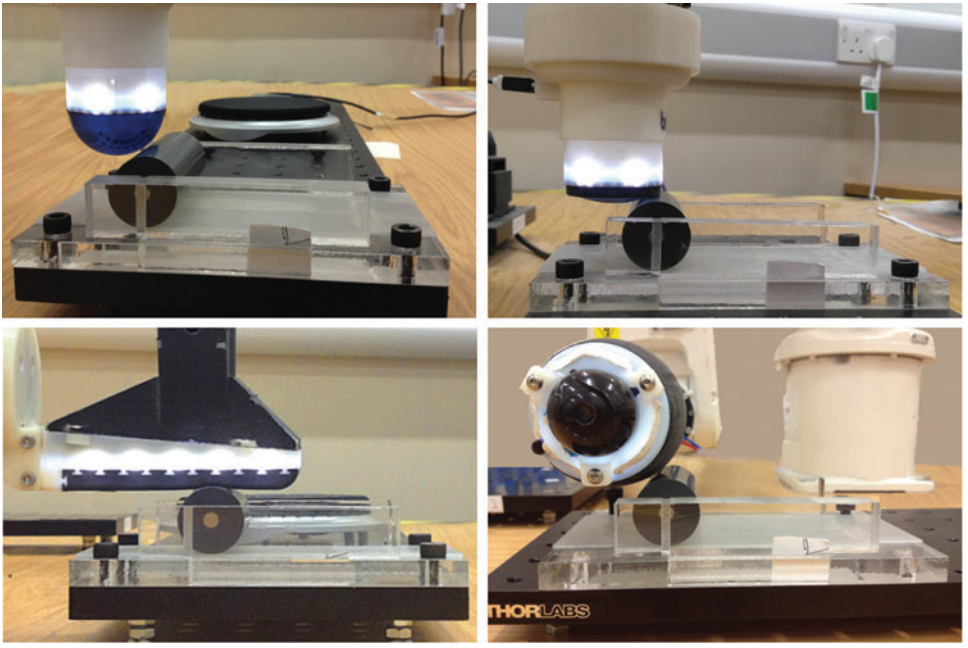
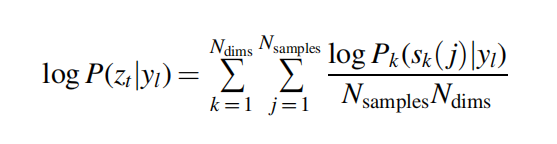
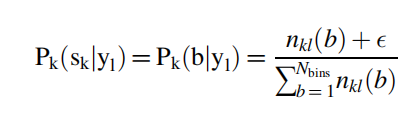
传感器作为末端执行器安装在6自由度 ABB IRB120 工业机器人臂上(图 8),并与直径为25毫米的圆柱接触,方法是将传感器尖端降低到与圆柱首次接触点下方3毫米处。然后,圆柱在定制平台的约束下沿一维(定义为y轴)水平滚动。该平台由平坦的有机玻璃底板和两个有机玻璃壁组成,约束圆柱沿壁移动(图8)。底板上添加了橡胶表面,以确保圆柱在滚动过程中不打滑。圆柱两端和滚轮一端安装的磁铁为圆柱提供了初始位置。 圆柱以无滑动的方式向前滚动,步长为0.1毫米,滚动范围为72毫米,沿y轴共包含720个不同位置。 在每个位置,记录10张图像(640×480像素,采样率约为20帧/秒)。然后在OpenCV中对这些图像进行滤波和阈值处理,并使用轮廓检测算法检测针的中心坐标。每个针根据其与传感器未接触圆柱时记录的默认针位置集的接近程度进行识别;如果在其默认位置半径20像素范围内未检测到针,则使用前一帧的位置。随后提取传感器针的x轴和y轴偏转时间序列,并将其视为单个传感单元输入。收集多个帧是为了减少针检测算法产生的噪声和传感器的微小位移。 这些数据收集两次,分别用作离线交叉验证的训练集和测试集(见验证部分),确保结果来自与训练数据独立的采样集。 数据处理 从形式上讲,数据以接触数据z1:t={z1,...,zt}的形式存在,编码为传感器值的多维时间序列: 其中索引j和k分别标记时间样本和数据维度。在本研究中,每个位置收集10帧图像,因此Nsamples=10,我们将每个针的x轴和y轴偏转视为单独的维度k,总维度数为254。这些接触数据为当前位置类别yl,1≤l≤Nloc提供了证据,每个位置类别被视为一组不同的点位置(此处使用跨越72毫米的72个位置)。 位置似然度(Pk(zt | yl)使用每个位置类别yl的训练数据测量模型: 该模型假设每个接触内的所有数据维度k和样本都是独立的(因此各个对数似然度相加)。此处,总和通过数据点总数NsamplesNdims进行归一化,以确保似然度不会随接触的样本数量而缩放。 与先前关于机器人触觉感知的研究一致,概率Pk(sk(j) | yl)通过对每个位置类别yl的训练数据应用直方图方法获得。数据维度k的传感器值sk在其范围内被划分为等间隔的区间Ib,(1≤b≤Nbins)(此处Nbins=100)。采样分布由训练类别yl的归一化直方图计数nkl(b)给出: 其中nkl(b)是类别yl的所有训练数据中维度k在区间b内的样本计数。 从技术上讲,如果任何直方图区间为空,似然度将无定义,这可以通过使用小常数 对区间计数进行正则化来解决。 传感器验证通过数据收集后的交叉验证来分析定位精度和算法性能。收集两组数据(称为训练集和测试集)用于交叉验证。然后从测试集中采样数据zr,并根据最大似然法进行分类,基于接触数据的最大位置似然度P(zt | yl)识别位置yl。然后在给定位置的每次测试运行中评估每个位置类别的平均绝对误差 平均误差 为所有位置的平均值。


数据观察 TacTip 当TacTip沿y轴方向在平坦表面上滚动圆柱时(如实验装置与数据收集部分所述),我们注意到x轴方向(垂直于圆柱运动方向)的针偏转呈现规则模式,连续的针排向外偏转(偏转范围为-30至30像素),然后恢复到基线(图9A、B)。然而,针的 y 轴偏转(沿圆柱运动方向)呈现不规则模式,所有针最初向下倾斜,然后依次恢复到基线位置。这种模式可能是由于圆柱与传感器皮肤之间的初始静摩擦力造成的。 图9:所有四个传感器的触觉数据。数据在圆柱72毫米运动范围内以0.1毫米的间隔采样(720个样本)。(A、C、E、G)x轴方向的针位移;(B、D、F、H)y轴方向(圆柱滚动方向)的针位移。最右侧的四个面板标识了每个传感器的针,并显示了x轴和y轴方向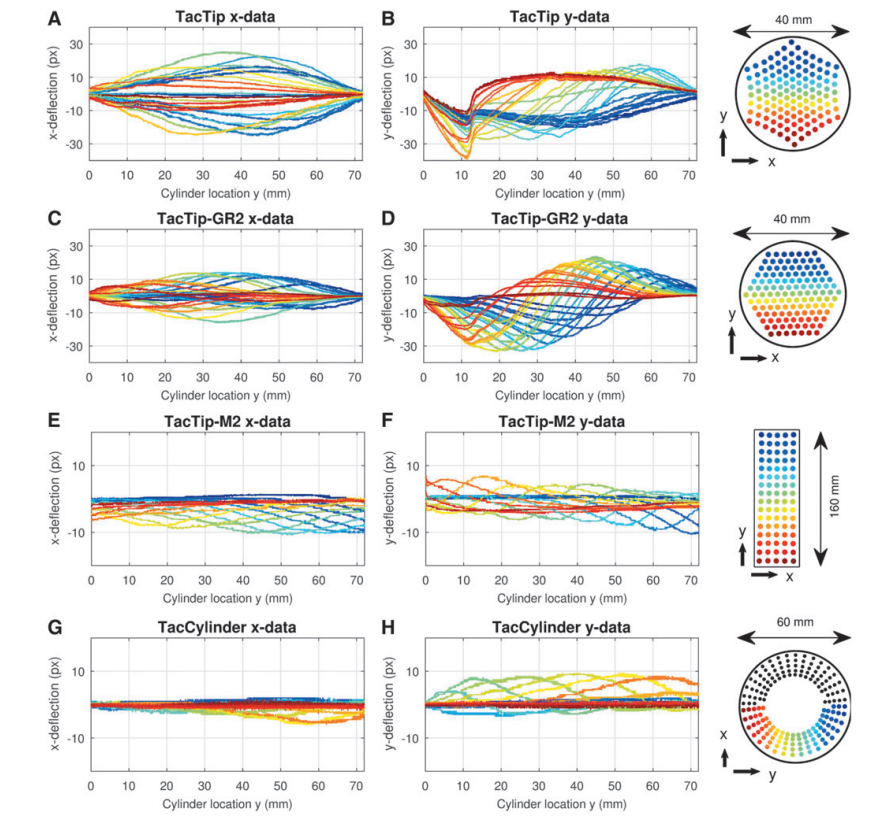
TacTip-GR2 TacTip-GR2采集的数据显示出与TacTip类似的x轴和y轴偏转模式,但偏转程度不太明显(图9C、D)。这在x轴方向最为显著,TacTip-GR2的偏转范围约为-12至12像素(而TacTip为-30至30像素)。 我们注意到,在TacTip中,最先与圆柱接触的针(图9中的红色和橙色)在 y 轴方向的偏转最大,而在TacTip-GR2数据中,传感器中间的针(图9中的黄色和绿色)在y轴方向的偏转最大。这种差异是由传感器的形状导致的,TacTip的圆顶形尖端在初始接触点附近产生较大的y轴偏转。TacTip-GR2大体上是平坦的,中心周围略有凸起,形成了一个中心区域,其内部动态特性使得偏转更大。值得注意的是,这些圆顶形形态也解释了中心针(黄色和绿色)相对于传感器边缘针(深红色、深蓝色)的偏转更大的原因。 TacTip-M2 TacTip-M2的数据呈现出规则的重复正弦模式,x轴方向的偏转范围为-9至4像素,y轴方向的偏转更为明显(-14至6像素)(图9E、F)。这是合理的,因为y轴是圆柱的运动方向,也是针运动自由度最大的方向,因为它对应于传感器的长轴。正弦模式是由于圆柱滚动时TacTip-M2上的针排同步运动产生的。 x轴和y轴方向均存在不对称性,随着圆柱向前滚动,x轴偏转的幅度增大,y轴偏转的正弦模式峰值从+8像素逐渐向下迁移至+2像素。这可能是由于TacTip-M2固有的机械不对称性,这种不对称性源于皮肤和底座在传感器两端的连接方式(图6)。 TacCylinder TacCylinder的数据显示出规则的偏转模式(x轴方向为- 6至2像素),y 轴方向的偏转更大(-4至12像素)(图9G、H)。我们仅考虑TacCylinder下半部分的针,因为上半部分的针不受与圆柱接触的影响。我们注意到x轴方向偏转的峰值幅度最初略有增加,然后减小,这表明承受更大压力的下方针偏转更大。 因此,从所有四个传感器的实验数据中可以观察到,传感器形态对收集数据的特征和质量具有巨大影响。针偏转的整体模式、它们的相对和绝对幅度以及偏转的顺序都强烈依赖于传感器形态。下一节将探讨这些差异如何影响圆柱定位性能。 验证结果 TacTip 使用材料与方法(验证部分)中详细描述的验证程序测试了TacTip的定位性能,结果总结在表2中。所有位置类别的平均定位精度ey=0.20毫米(图10A),且所有位置的精度均低于1毫米。考虑到TacTip皮肤中最接近的针(在中心)间距为2.4毫米,且这些针的x轴和y轴偏转充当传感单元,我们认为传感器的分辨率为2.4毫米。因此,TacTip在圆柱运动范围内展示出约12倍的超分辨能力。 表2:TacTip系列各传感器的验证结果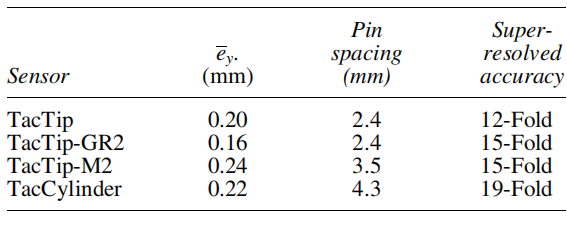
图10:四个传感器的定位精度:TacTip(A)、TacTip-GR2(B)、TacTip-M2(C)和TacCylinder(D)。结果显示了72个位置类别,每个类别对应1毫米范围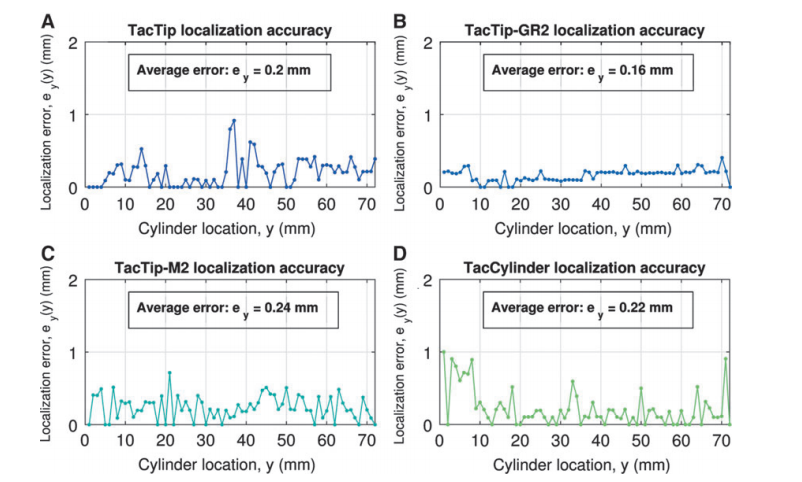
在先前的研究中,带有浇铸硅橡胶皮肤的TacTip被应用于圆柱滚动任务,以演示沿复杂轨迹的触觉操控。该研究发现超分辨灵敏度约为8倍;因此,我们新型3D打印TacTip的超分辨灵敏度达到了类似水平。 TacTip-GR2 TacTip-GR2的平均定位精度为ey=0.16毫米,且在整个范围内保持低于0.3毫米(图10B),对应于2.4毫米针间距下的15倍超分辨能力。我们认为,TacTip-GR2相对于TacTip传感器在定位精度上的轻微提升,是由于其平坦表面在圆柱位置范围内产生了更一致的针偏转模式(图9)。 TacTip-M2 TacTip-M2的所有位置类别的平均定位精度为ey=0.24毫米(图10C),且在整个位置范围内均表现出亚毫米级精度。传感器皮肤中充当传感单元的内部针在x轴和y轴方向的间距为3.5毫米。因此,TacTip-M2在圆柱运动范围内再次展示出约15倍的超分辨能力。 TacCylinder TacCylinder的所有位置类别的平均定位精度为ey=0.22毫米(图10D),且在大部分位置范围(3-72毫米)内表现出亚毫米级精度。值得注意的是,初始范围(0-7毫米)的高误差与TacCylinder尚未完全与圆柱接触有关。TacCylinder上的针在传感器皮肤的最小间距为4.3毫米。因此,TacCylinder在圆柱运动范围内展示出约19倍的超分辨能力。
制造业 TacTip已应用于质量控制任务,在汽车制造领域具有潜在应用前景。在该研究中,主动触觉算法被用于识别间隙宽度,精度达到0.4毫米,间隙上方的垂直深度精度达到0.1毫米。 因此,将TacTip安装在工业机器人臂上,可为生产线上的自动化质量控制提供准确可靠的解决方案。 TacTip传感器的另一个应用是复合材料铺层(Elkington等人,利用触觉传感器检测复合材料铺层过程中的缺陷;未发表数据),其中触觉感知可为工业机器人提供实时反馈,以检测复合材料铺层过程中的缺陷和不规则性。这是朝着完全自动化复合材料铺层迈出的一步,无需进行昂贵且耗时的人工“手工”铺层。 因此,TacTip传感器为制造业提供了解决方案,可实现当前人工执行任务的自动化,并有可能改进这些任务的性能。 手部操控 TacTip-M2适配用于M2夹爪。因此,物体可以沿着带传感功能的夹爪垂直滚动,滚动范围为20毫米(图11,左面板)。经过训练后,机器人可以仅基于触觉数据跟踪轨迹,成功执行一维手部触觉操控。 图11:集成TacTip的M2夹爪(左)和GR2夹爪(右)的运动范围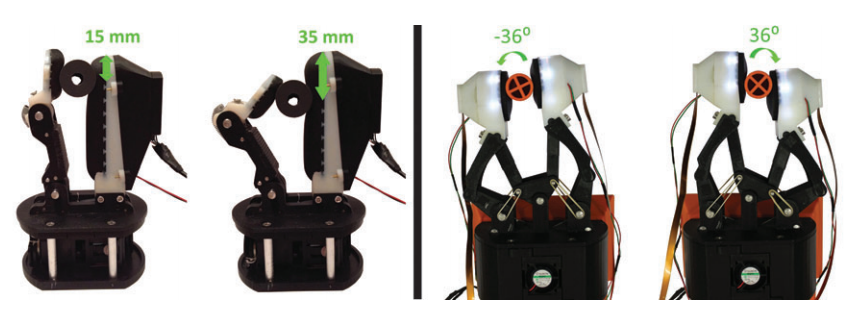
集成在GR2夹爪中的TacTip-GR2可以执行物体的手部触觉重新定向,这是另一种形式的触觉操控。在此应用中,两个活动手指均具备触觉功能,可沿曲线轨迹旋转物体(图11,右面板)。 触觉操控任务允许在手部对物体进行复杂且精密的处理。这些能力将增强机器人在人机交互、辅助机器人和工业机器人领域的安全性、交互性和整体潜力。 物体探索 研究人员已通过TacTip演示了探索性触觉伺服技术,实验涉及多个二维物体:圆盘、蜗壳层流以及圆形或螺旋形脊。研究人员采用了与本文中验证触觉传感器性能类似的方法,并结合仿生主动感知原理,以感知和控制边缘方向以及相对于边缘的径向位置。控制策略通过旋转传感器来维持其方向和径向位置,同时传感器沿边缘切向移动,成功跟踪了所有测试物体的轮廓。 该方法将主动感知和触觉探索整合到通用的主动触觉算法中,有望推广到更复杂的三维任务。它还与人类的探索流程(此处为轮廓跟随)相关,因此控制策略可以扩展到包括更多此类探索流程(例如,通过机器人手的包围来检测体积)。 心理物理学 TacTip还被用于研究基于辨别的感知。在该研究中,TacTip经过训练以区分两个不同锋利度的边缘,获得的恰可察觉差异(JND)为9.2,与先前报道的人类恰可察觉差异8.6相当。 未来使用TacTip传感器的研究可以进一步推进这种方法,探索机器人心理物理学的概念,即采用人类心理物理学实验方法来评估人工传感器。 医疗应用 近期的研究表明,TacCylinder能够检测与胃肠道内可疑组织相关的各种肿块的表面形变。这些传感数据已用于创建测试环境的三维渲染。目前,研究重点在于区分肿块特征和组织密度,以更准确地识别黏膜下肿瘤。同时,研究人员还在开发一种独立的气动触诊传感器。 过去,TacTip曾被用作肿块检测遥触觉系统的一部分,该系统将触觉反馈传递给外科医生。最近,TacTip的设计原理被应用于磁共振成像(MRI)扫描期间使用的枕头,以检测细微的头部运动。因此,TacTip传感器在多个医疗应用中具有潜力,特别是在肿瘤检测、胶囊内窥镜和MRI扫描方面。 其他应用 TacTip 传感器的未来迭代可以为机器人领域已知的实际问题提供新颖的解决方案,将触觉感知扩展到新的领域和应用场景。这些传感器的3D打印特性以及CAD文件和制造方法的开放获取,使得TacTip传感器易于使用、适配和改进。除了进一步探索上述领域外,新的应用还包括覆盖机器人表面的触觉皮肤贴片,或改善双足机器人行走能力的触觉足部。
我们在圆柱滚动任务中测试了四种3D打印传感器:TacTip、TacTip-GR2、TacTip-M2和TacCylinder。结果发现,所有四种传感器都能够以亚毫米级精度定位圆柱。所有四种传感器均展示出超过10倍的超分辨能力,其中TacTip-GR2的性能最佳(尽管其针间距比TacCylinder更小),这可能是因为其形态最适合滚动任务。 所有TacTip传感器均采用相同的工作原理,但它们不同的形态导致了明显的行为差异。这些结果强化了传感器形状与功能之间紧密联系的有效性,并展示了3D打印技术的优势,该技术允许进行形态定制。特别是,多材料打印能够实现整个传感器的3D打印,包括其柔性皮肤,为不同材料和形态的实验开辟了更多可能性。通过修改3D打印皮肤材料和尖端所用硅凝胶的邵氏硬度,可以调整传感器的柔顺性以适应不同任务。对针长度、针间距和针宽度等参数的进一步实验,也可能为特定任务的TacTip设计提供优化方案。TacTip-M2和TacCylinder传感器可以采用模块化设计,以方便这些实验的进行。未来的研究方向包括加速数据处理算法和整体控制回路,以实现连续、不间断运动的任务,以及进一步小型化TacTip,使其能够集成到更多种类的机器人手中。 为了鼓励将TacTip设计原理应用于新的触觉传感应用,我们已在软机器人工具包上开源了硬件以及制造说明。该成果获得了“2016年软机器人研究贡献奖”,旨在提供对廉价可定制触觉传感器的开放获取,而这类传感器目前在该领域仍然缺乏。我们希望研究团队能够使用和开发TacTip传感器,并利用3D打印技术将我们的设计原理应用于他们自己设计的新型传感器和系统。
柔性触觉传感器对于操控任务和安全的人机交互至关重要。我们的柔性仿生触觉传感器系列在定位任务中表现出强大的超分辨性能。这些传感器为触觉传感领域的未来研究和创新提供了基础。
免责声明:文中观点仅供分享交流,文章版权及解释权归原作者及发布单位所有,如涉及版权等问题,请您联系TechApe_01@yeah.net告知,我们会在第一时间做出处理。 来源:智行时代
https://mp.weixin.qq.com/s/QOhDg1IbQ2-kvS446WWTRg?scene=1&click_id=47
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
