
市场空间:预计 2030 年电子皮肤全球市场规模达 92 亿元
人形机器人电子皮肤市场空间测算
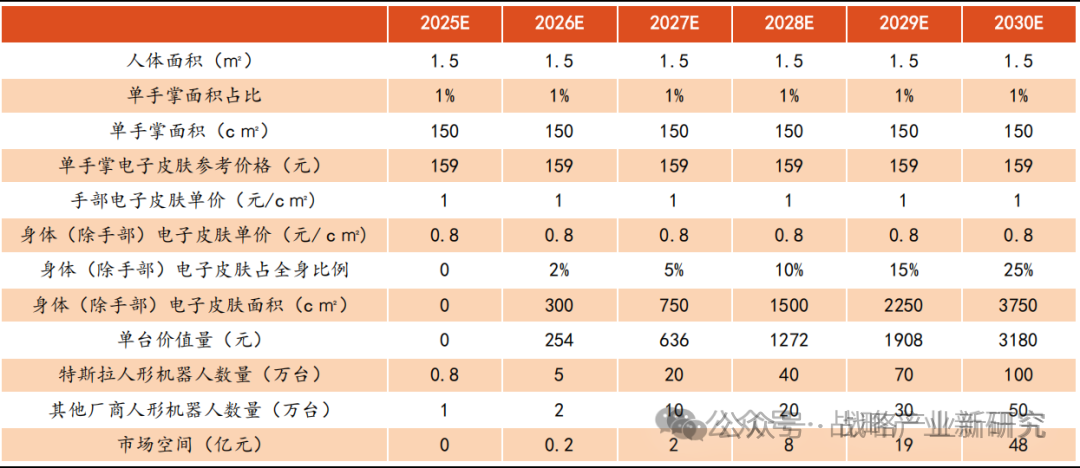
预计 2030 年全球人形机器人电子皮肤(仅考虑手部应用)市场空间达 44亿元。
2025 年 1 月 9 日,马斯克公开发言表示 Optimus 人形机器人 2025 年产量预计为数千台,2026、2027 年产量分别有望达到 5-10、50-100 万台。之后马斯克修改 Optimus 人形机器人产量预期,于 2025 年 4 月 23 日称,预计到 2025年底,将有数千台 Optimus 机器人在特斯拉工厂工作,公司也计划扩大 Optimus的规模,有信心预测到 2029 年或 2030 年,Optimus 机器人每年产量将达 100万台。据此,我们假设 2030 年特斯拉人形机器人产量达 100 万台。
2025-2030 年全球人形机器人电子皮肤
(仅考虑手部应用)市场空间测算

资料来源:特斯拉,财联社,中国电子报,兴恒安等,东方财富证券研究所预测
预计 2030 年全球人形机器人电子皮肤(除手部外的部位)市场空间达 48亿元。
灵巧手是人形机器人与外界交互的核心,将率先使用电子皮肤,且对电子皮肤精度要求最高、单价最贵。随着人形机器人应用场景的升级以及电子皮肤的技术迭代,手臂、足底、躯干等身体其他部位也有望使用电子皮肤。
2025-2030 年全球人形机器人电子皮肤
(除手部外)市场空间测算
资料来源:中南大学湘雅医院,特斯拉,财联社等,东方财富证券研究所预测
柔性传感器市场空间测算:机器人+汽车+医疗+消费电子
全球柔性压力传感器市场空间广阔,2033 年市场规模或达 68 亿美元。
柔性压力传感器广泛应用于汽车、医疗保健、消费电子、机器人等领域,在汽车领域,可用于监视轮胎压力,从而实现实时数据收集,以提高车辆的安全性和效率;在医疗保健领域,可被整合到可穿戴设备中,跟踪生理参数如血压和呼吸率,从而提供持续的健康监测;在消费电子领域,可用于可穿戴 3C 电子设备。
根据 Verified Market Reports 的测算,2033 年全球柔性压力传感器市场规模有望达 68 亿美元,2025-2033 年的年均复合增速达 12.1%。
全球柔性压力传感器市场规模(亿美元)
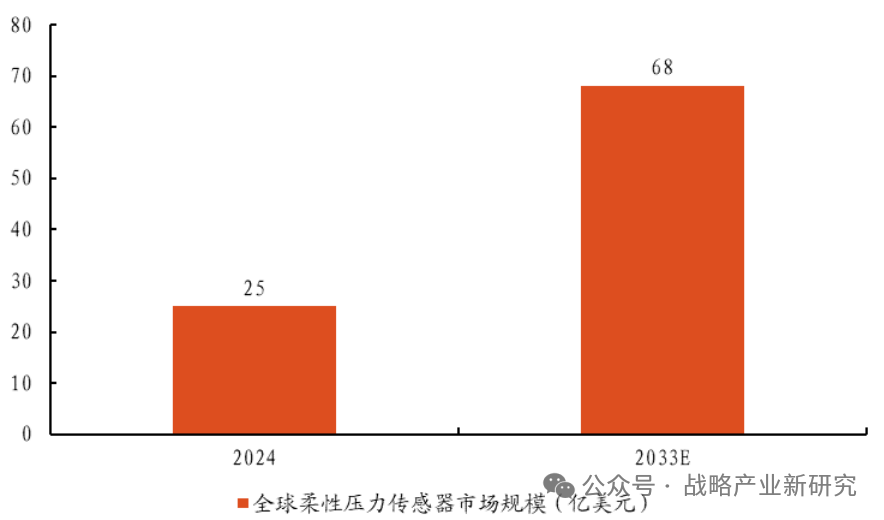
资料来源:Verified Market Reports,东方财富证券研究所
电子皮肤是机器人实现与外界交互能力的核心
电子皮肤:机器人感知外界环节的关键,柔性传感器是理想方案
电子皮肤则是一种模拟天然皮肤功能的设备,柔性触觉传感电子皮肤可以模仿人体皮肤的触觉传感功能和灵活性能,可以附着在人体皮肤或机器人等表面,感知各种刺激,如压力、温度等。
电子皮肤触觉传感器空间分辨率可达到毫米级,接近人类的皮肤。触觉传感器分为 3 种:
-
硬质皮肤触觉传感器,主要有力/力矩传感器、力敏电阻传感器、加速度计和变形传感器等。这类硬质皮肤通常包含多个触觉传感器,通过多传感器的均值来提供比单一传感器更好的测量分辨率。这类硬质皮肤空间分辨率受到限制,一般大于 100 平方毫米。
-
柔性皮肤或电子皮肤触觉传感器,能够通过接触表征出被测物体的性质(表面形貌、重量等)或数值化接触参量(力、温度等)的设备或系统。电子皮肤阵列触觉传感器的空间分辨率可达到毫米级,接近人类的皮肤,可覆盖于机器人、医疗设备与人体假肢等复杂的三维载体表面,并准确感知周围环境的各种信息。
-
内接触式触觉传感器,用来检测机器人各部分的状态,而不是检测被测对象周围的外部信息,其表面没有任何的覆盖和皮肤保护,如工业机器人手臂关节/力矩传感器,在非人机交互领域如工业结构环境下已完善应用多年,其不足之处就是可提取的触觉信息相当有限,如空间分辨率相当低且接触位置难以确定。
电子皮肤一般由电极、介电材料、活性功能层和柔性基材等组分构成。当一定的外部条件刺激到电子皮肤时,活性功能层将应变、温度等信号转换为可以检测的电信号,然后电极层接受并传输这些电信号到数据处理模块以及显示终端。
电子皮肤的工作原理可以简单理解为以下几个步骤:感知压力——信号转换——信号传输——数据处理——反应和调整——学习和适应。
机器人触觉传感系统的层次功能和结构框图
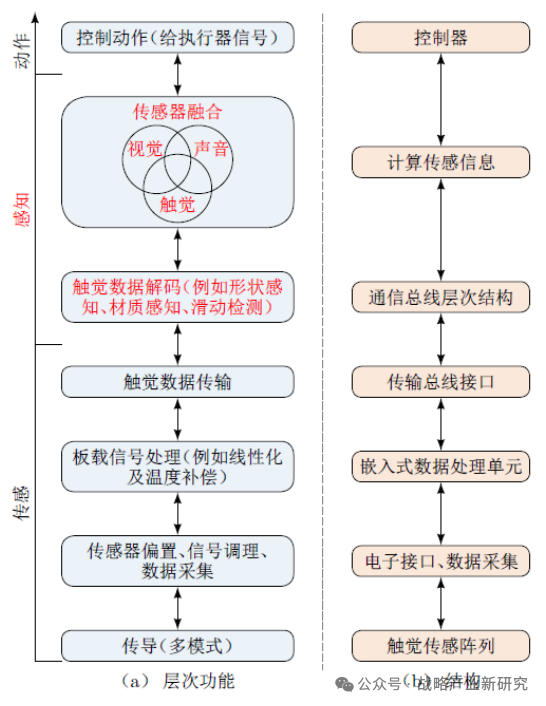
资料来源:朱盛鼎等《触觉传感器与电子皮肤研究进展》,东方财富证券研究所
触觉传感系统是机器人实现抓握物体等动作场景的关键。
机器人的触觉传感系统通过接触来测量物体的物理特征,从而实现对周围环境的感知。机器人触觉感知有许多应用场景:机器人在抓取物体时,可通过触觉感知来控制抓取的力度大小,不会因为抓力过小使物体滑落,也不会因为抓力过大导致物体损坏;机器人还能根据触觉信息,通过深度学习等识别算法来识别接触物体的材质及种类等。
电子皮肤需具备高柔性,柔性传感器是理想方案。
为了覆盖机器人等复杂的三维表面和活动的关节部位,电子皮肤阵列触觉传感器通常还必须具有高柔性与高弹性等。根据墨现科技的研究,柔性压力传感器是一种理想的电子皮肤方案,无论是用于大面积的碰撞防护,还是手部的精细触摸,相对于刚性的MEMS 方案,具有明显的优势。MEMS 传感器虽然性能卓越,但其生产工艺相对复杂,成本较高。柔性传感器的制造过程通常比 MEMS 传感器更为简单,大规模生产时成本效益高。
电子皮肤技术路径多样,压阻式、压电式较为常用
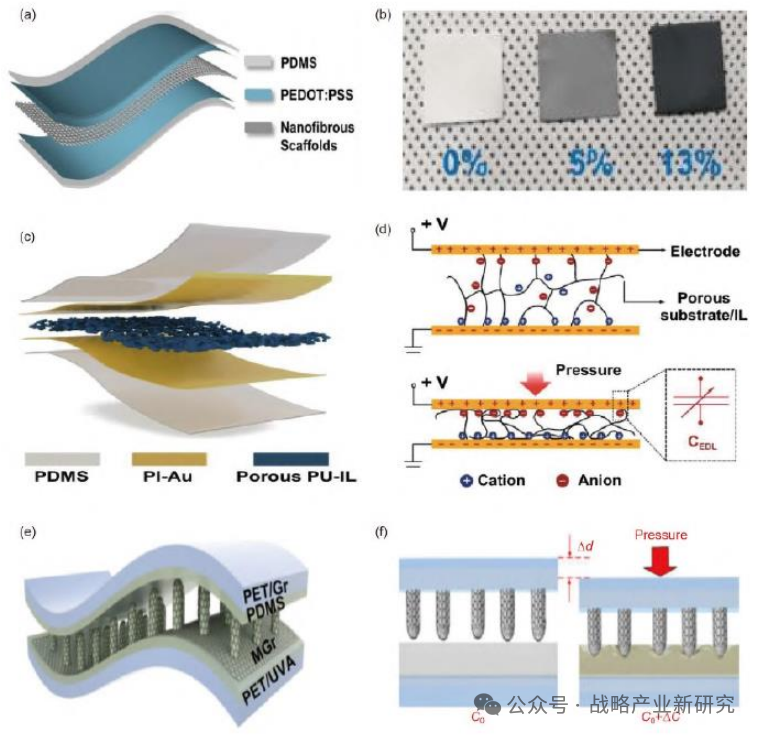
压阻式柔性触觉传感器
压阻式触觉传感是一种基于压阻效应的触觉传感技术,压阻效应简单来说就是压力不同导致电阻不同,即材料的电导率在机械应力的作用下发生了变化,压力与电阻具有相关关系,一般以线性相关关系居多。因此,压阻式柔性压力触觉传感电子皮肤的传感功能材料需要具有压阻效应,进而需要对材料或者器件进行设计以求能够达到使用条件。
压阻式柔性压力触觉传感电子皮肤使用的材料通常是弹性的、导电的,如表面涂有导电材料的薄膜或弹性聚合物,其可以将施加的压力变化转换成电阻信号的变化。
压阻式柔性压力触觉传感电子皮肤
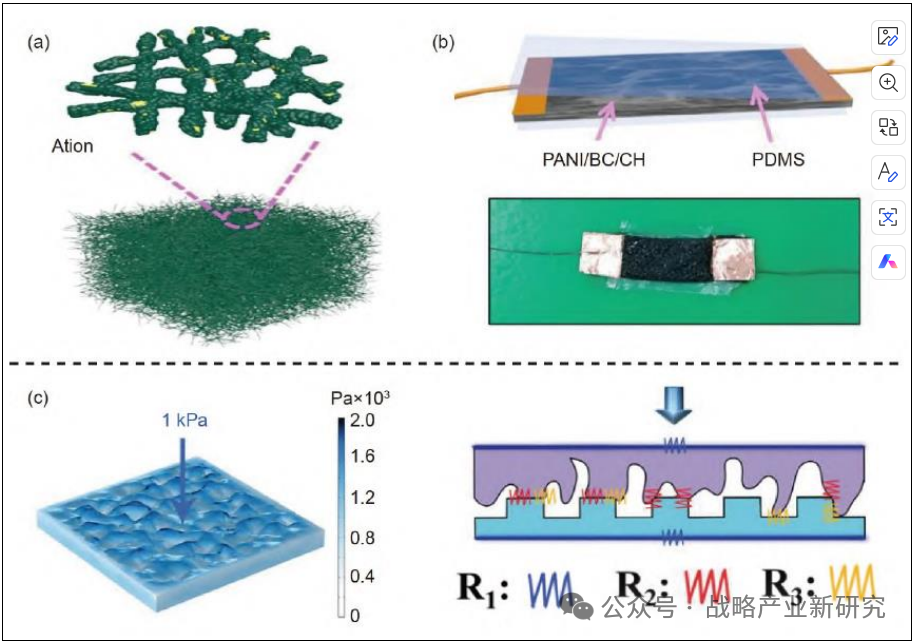
资料来源:程斌等《柔性触觉传感电子皮肤研究进展》,东方财富证券研究所
压阻式触觉传感器普遍具有负载能力强、鲁棒性好、电信号测量便捷等优点,缺点是迟滞性较大,不利于快速响应,并且其温漂大,线性度也较差。
电容式柔性触觉传感器
电容式柔性压力触觉传感电子皮肤基于电容效应,可以通过测量电容值的变化来获取物体与电子皮肤之间接触状态的信息,即电容式柔性压力触觉传感电子皮肤将力学信号转化为电容信号,进而检测出电子皮肤所受压力的大小。电容与压力一般在一定范围内呈线性相关关系,电容显示了两个电极之间的电场储存能量的能力。
电容式柔性压力触觉传感电子皮肤
资料来源:程斌等《柔性触觉传感电子皮肤研究进展》,东方财富证券研究所
电容式触觉传感器的灵敏度与空间分辨率高,响应幅度宽,但其测量电路复杂,传感器易受电气干扰的影响。
压电式柔性触觉传感器
压电式柔性压力触觉传感电子皮肤利用压电效应来实现触觉感知。压电效应是压电材料由于形变而产生的电极化现象,即当压电材料受到外力时,内部就产生电极化,同时会在材料表面产生等量的正负电荷。基于压电效应,压电式柔性压力触觉传感电子皮肤可以将外部的压力、波动或振动等机械信号转化为电信号,进而实现对物体表面触摸和压力的感知。
压电式柔性压力触觉传感电子皮肤
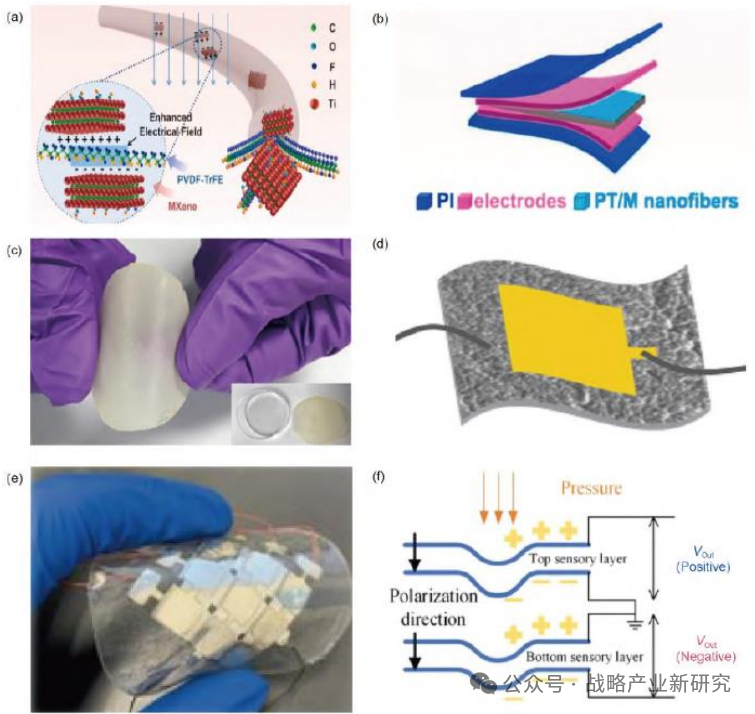
资料来源:程斌等《柔性触觉传感电子皮肤研究进展》,东方财富证券研究所
压电式触觉传感器是一种自发电和机电转换传感器,不需要外部电源,因此这种传感器更便于携带,且其材料刚度高,线性度好,响应灵敏,但它易受噪声干扰,其介电性会受温度影响。
光学式柔性触觉传感器
光学式触觉传感器将传感器所受压力映射为光信号强度、波长等性质的变化,通过检测光学信号来检测传感器所受压力。
阵列式光学式触觉传感器
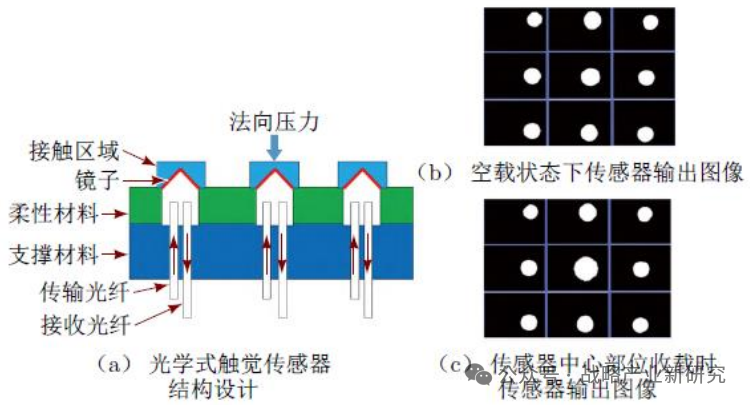
资料来源:朱盛鼎等《触觉传感器与电子皮肤研究进展》,东方财富证券研究所
光学式触觉传感器的分辨率高,无电气干扰的问题,但容易受到温度影响,且光纤的微弯曲会导致光损失,分析触觉信息的计算方法复杂。
电磁式(霍尔效应传感器)触觉传感器
电磁式触觉传感器是利用电磁感应原理把压力作用转换成线圈的自感系数和互感系数的变化,再由电路转换为电压或电流的变化量输出。
电磁式(霍尔效应传感器)触觉传感器
资料来源:electricity-magnetism,东方财富证券研究所
电磁式(霍尔效应传感器)触觉传感器具体设计
示意图
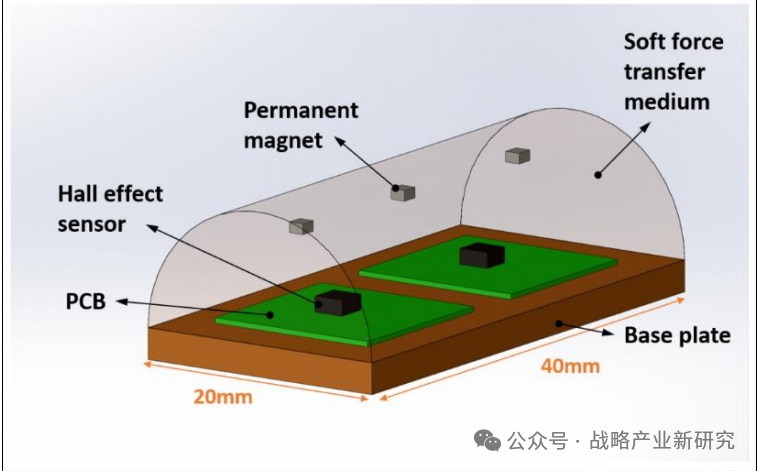
资料来源:Alireza Mohammadi 等《Magnetic-based Soft Tactile Sensors with Deformable Continuous ForceTransfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation》,东方财富证券研究所
电磁式触觉传感器的优点是力感知灵敏度较高,有一定的切向力表征能力;缺点是抗外界干扰能力差,集成度较低,较难对切向力进行直接的定量精准测量。
各技术路线电子皮肤(触觉传感器)对比
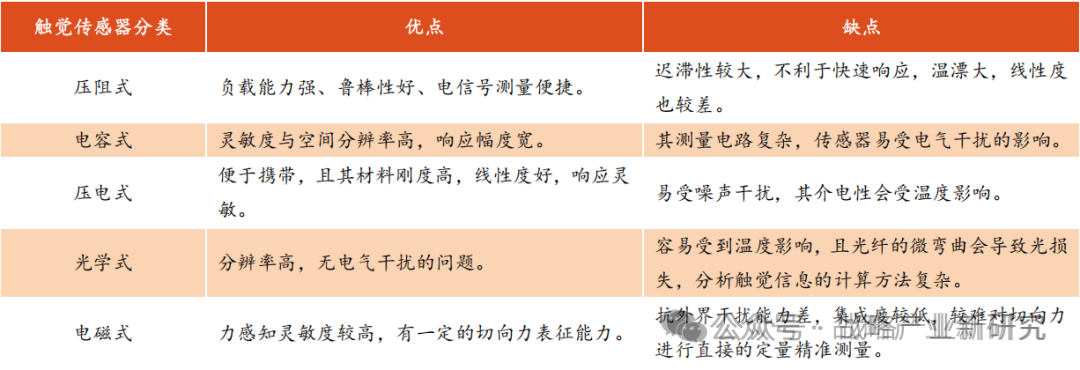
资料来源:程斌等《柔性触觉传感电子皮肤研究进展》,朱盛鼎等《触觉传感器与电子皮肤研究进展》,东方财富证券研究所
电子皮肤的主要构成材料:柔性基底+导电活性材料+电极
电子皮肤的核心构成材料是柔性基底和导电活性材料。柔性压力传感器的工作原理是将外部施加的压力变化转换成电信号的变化。与传统压力传感器相比,柔性压力传感器既需要良好的柔韧性又需要灵敏的压力感应功能,在应力下不会产生物理损坏是制备柔性压力传感器的关键。
柔性压力传感器主要由柔性基底、导电活性材料和导电电极构成。使用较多的电极主要有铜线、铜箔、银线等,技术相对稳定成熟。为实现高灵敏度、宽传感范围、良好可拉伸性等性能,柔性基底和导电活性材料的选择是制备柔性压力传感器的关键。
柔性基底材料
电子皮肤实际应用中使用柔性或弹性材料作为基底。传统电子材料如硅、金属和氧化物等因为脆性大而在电子皮肤实际应用中受到限制,因此构建电子皮肤的基底常常选择柔性材料或弹性材料,如弹性薄膜基体、水凝胶基体、3D海绵基体等。
电子皮肤各类柔性基底材料对比
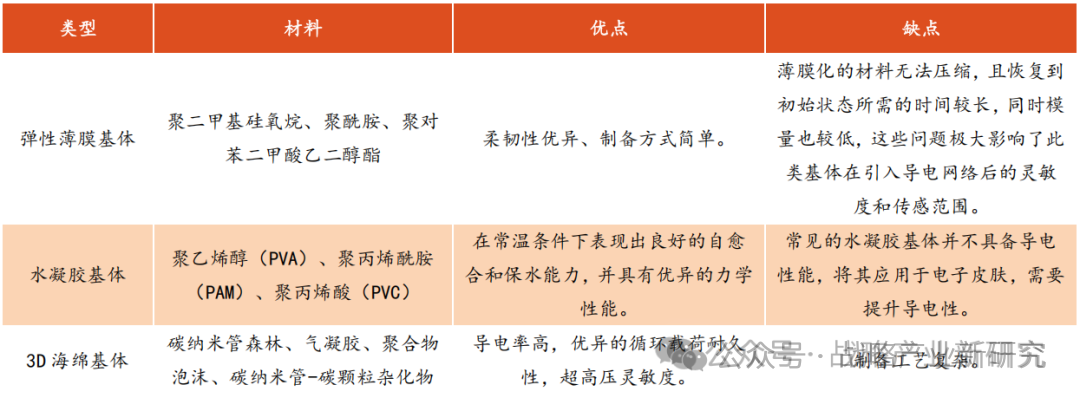
资料来源:何孟涵、陈煜《面向电子皮肤的智能材料构建策略》,东方财富证券研究所
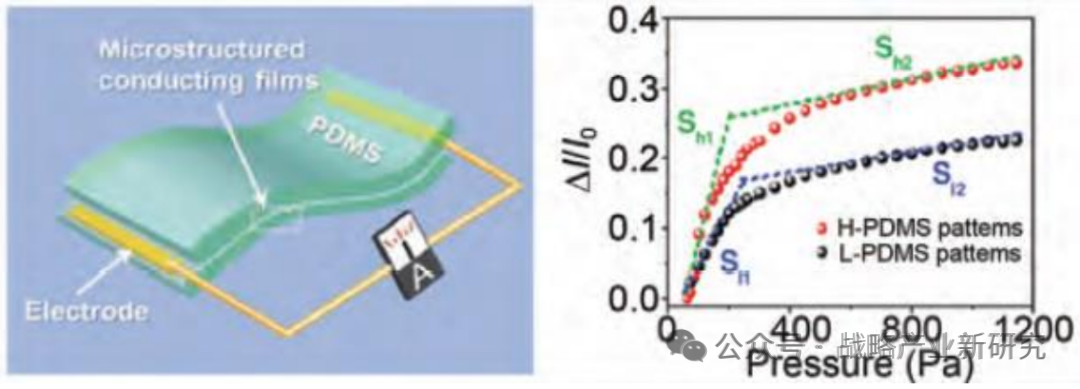
弹性薄膜基体柔韧性优异、制备方式简单,是制备电子皮肤最为常见的基体之一。聚二甲基硅氧烷、聚酰胺和聚对苯二甲酸乙二醇酯常作为基材制成薄膜并用于电子皮肤。
PDMS 基体电子皮肤
资料来源::何孟涵、陈煜《面向电子皮肤的智能材料构建策略》,东方财富证券研究所
水凝胶由交联的亲水性聚合物网络和大量水组成,其具备与人体皮肤组织相似的弹性模量,以及优异的生物相容性,是制备电子皮肤传感器的理想材料。常见的水凝胶基体包括如聚乙烯醇(PVA)、聚丙烯酰胺(PAM)、聚丙烯酸(PVC)等。该类材料并不具备导电能力,将其应用于电子皮肤,需要提升导电性,如将导电填料复合到水凝胶基质中。
水凝胶基电子皮肤
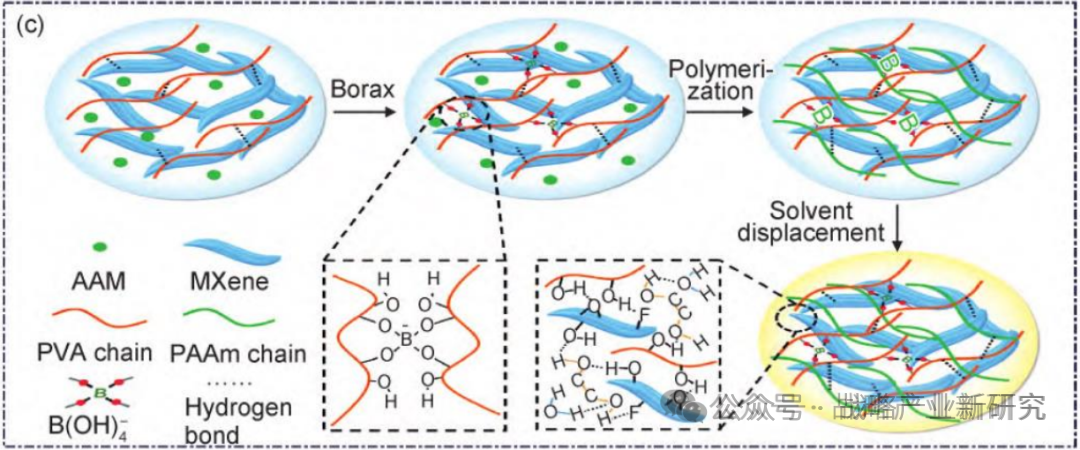
资料来源:何孟涵、陈煜《面向电子皮肤的智能材料构建策略》,东方财富证券研究所
3D 柔性海绵是由相互连接的金属颗粒或细丝组成的三维结构,常用的材料包括碳纳米管森林、气凝胶、聚合物泡沫和碳纳米管-碳颗粒杂化物等。其能通过增大材料的表面粗糙度和接触面积,来提升材料的传感性能,在电子皮肤柔性传感方面具备巨大潜力。
3D 海绵基体电子皮肤
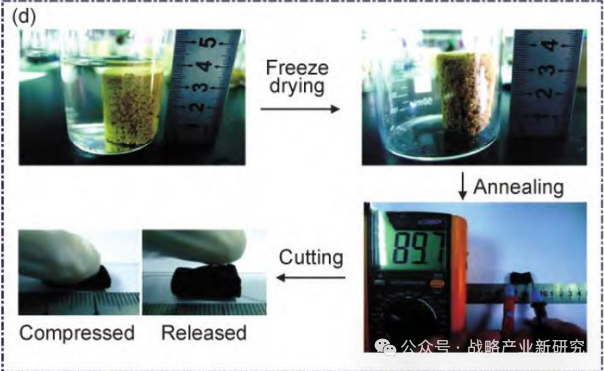
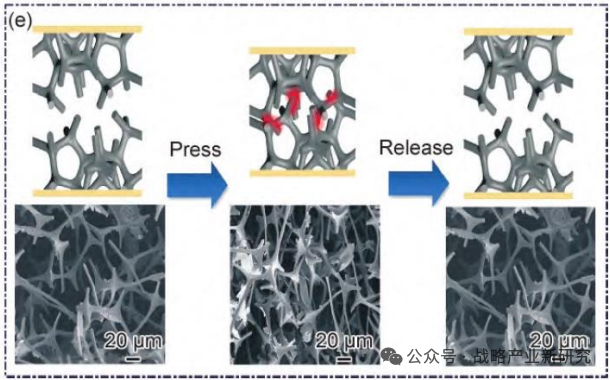
资料来源:何孟涵、陈煜《面向电子皮肤的智能材料构建策略》,东方财富证券研究所
导电活性材料
用于构成柔性压力传感器的导电活性材料主要包括碳纳米管和石墨烯。
柔性电子应变传感器最重要的组成部分是活性层,而具有优异的机械性能和电子特性的活性材料是决定活性层性能的关键,常见的活性材料主要分为三类: 自身具有高导电能力材料、高弹性导电复合材料和压电材料。
常见的柔性压力传感器的活性材料包括碳纳米管、石墨烯、弹性复合结构活性材料。
碳纳米管是一种由石墨烯卷曲形成的一维碳基纳米材料,具有优异的导电和机械性能,同时还具有很好的化学稳定性。无结构缺陷的碳纳米管具有非常高的电子传输能力,其电子迁移率高达 10000cm^2/V/s。因此碳纳米管可以作为高性能柔性压力传感器的活性材料。
基于碳纳米管的柔性电子传感器
资料来源:蔡依晨等《可穿戴式柔性电子应变传感器》,东方财富证券研究所
石墨烯是由单层碳原子组成的蜂窝状晶格结构, 具有很好的光学性能、机械性能、导热性能以及非常高的载流子迁移率(约为 20000cm^2/V/s),是构建柔性电子应变传感器最为理想的活性材料,其常见的制备方法包括化学气相沉积法、外延生长法和化学剥离石墨法。
除了碳纳米管和石墨烯以外,为了使柔性压力传感器在较大应变情况下能保持较好的导电能力,可将弹性体(PDMS、海绵、多孔材料)与导电材料(碳纳米管、石墨烯、碳黑、导电聚合物、金属纳米粒子、金属纳米线、导电石墨等)有机复合,由此得到弹性体复合活性材料,复合材料具备优异的导电性能和较高的各向异性,也是一种较为常用的活性材料。
电子皮肤应用前景广阔,有望用于除机器人手部外的其他部位
人形机器人对电子皮肤的应用:特斯拉、智元、小鹏等
特斯拉 Optimus Gen2 机器人手部使用触觉传感器

资料来源:墨现科技公众号,东方财富证券研究所
小鹏机器人手部使用触觉传感器

资料来源:墨现科技公众号,东方财富证券研究所
智元机器人手部使用触觉传感器
资料来源:IT 时报公众号,东方财富证券研究所
在人形机器人中,柔性传感器的应用按重要性和功能排序,主要体现在以下部位:
-
灵巧手(指尖、指腹、手掌):柔性传感器能够精确感知抓取的力度、触感和物体形状,使机器人能够细致地操作物体,避免过度用力或损坏物品。它提高了机器人的灵巧性和适应能力,尤其在处理易碎物体或精细任务时至关重要。
-
手臂(前臂到整个手臂):柔性传感器在手臂的应用可监测运动状态、力量分布和负载,帮助机器人进行更加精确和灵活的动作。它能确保机器人在执行抓取、搬运或协调动作时,避免关节过度受力,提升稳定性和安全性。
-
脚部:脚部的柔性传感器能够感知地面情况和压力变化,帮助机器人在不同地面上行走时保持平衡并调整步态。这对于提升机器人在复杂地形中的稳定性和自适应能力非常重要。
-
身体躯干:柔性传感器覆盖躯干区域,有助于机器人感知姿势和负载分布,确保稳定的运动轨迹。它能防止机器人因失衡或过度用力导致摔倒或撞击人类,提升机器人的协调性和安全性。
-
脸部:面部的柔性传感器增强了机器人面部对接近或接触的感知能力,提升机器人与人类的情感互动效果。
相关公司:市场格局较优,国内厂商加速导入
柔性触觉传感器市场方兴未艾,国内厂商加速发展。
海外、国内触觉传感器公司介绍
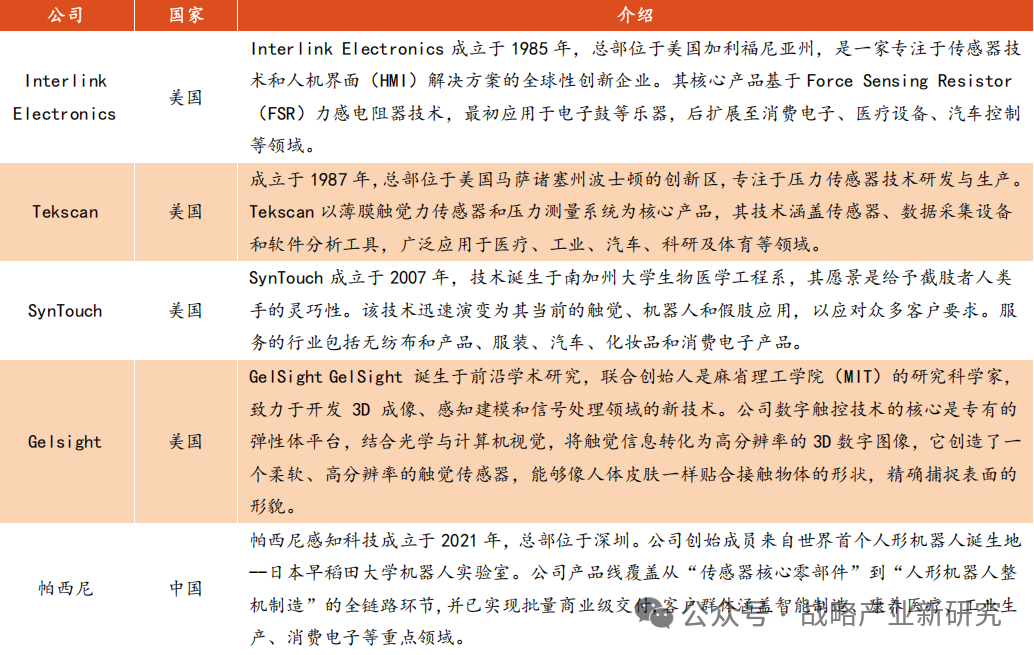
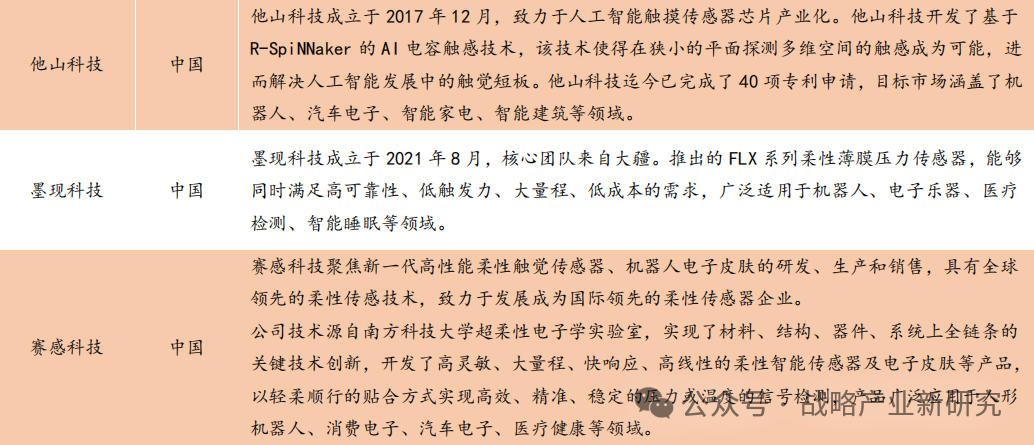
资料来源:各公司官网,华联欧国际贸易,爱企查,创业邦,创业联合网,东方财富网等,东方财富证券研究所
汉威科技:老牌传感器厂商,柔性传感器积淀深厚
福莱新材:深耕涂布工艺,积极进军机器人电子皮肤领域
祥源新材:聚焦 IXPE 材料,有望应用于机器人电子皮肤
日盈电子:深耕汽车电子,形成“感知—传输—控制”产品阵列
申昊科技:聚焦智能机器人+行业应用,布局电子皮肤产品
源自:战略产业新研究
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
