
2026年正成为人形机器人从“破圈走红”走向“规模落地”的关键一年。相比2025年以展示与关注为主的阶段,如今人形机器人正加速进入真实应用场景,从工业制造、物流搬运到商业服务与家庭探索,产业化进程明显提速。行业评价标准也随之转变,从过去强调“炫技表现”,转向更关注“实际价值与稳定运行能力”。
在这一过程中,人形机器人的运动性能、能效水平与系统稳定性持续提升,而支撑这一跃迁的,不仅是具身智能与大模型的进步,更是底层硬件体系的重构——以氮化镓(GaN)为代表的第三代半导体,正逐步成为重塑机器人“肌肉与神经”的关键基础技术。
氮化镓是什么?
氮化镓(GaN)是一种典型的第三代宽禁带半导体材料,相比传统的硅(Si)材料,具有更宽的禁带宽度、更高的电子迁移率以及更强的击穿电场强度。这些物理特性使得基于氮化镓的功率器件能够在更高电压、更高频率和更高温度条件下稳定工作,同时保持更低的能量损耗。

△氮化镓充电器 源自:深圳富源电官网
简单来说,氮化镓可以实现“更快的开关速度、更小的能量损失以及更高的功率密度”,因此被广泛应用于电源转换、快充、电机驱动以及射频通信等领域。随着电子系统向高效化、小型化发展,氮化镓正逐步从消费电子扩展到新能源汽车、数据中心以及人形机器人等高端应用场景,成为替代传统硅基功率器件的重要技术路径之一。
让机器人关节更灵巧
人形机器人为了实现类似人类的运动能力,整机通常需要在全身部署约 40个 伺服电机 ——主要采用永磁同步电机(PMSM)或无刷直流电机(BLDC),分布于颈部、躯干、四肢乃至足部关节,承担从姿态控制到动态运动的全部功能。
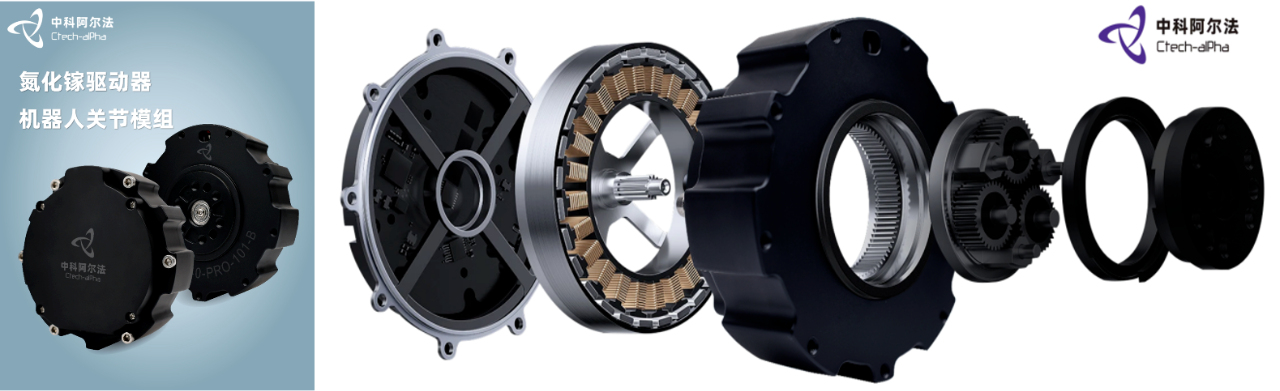
△中科阿尔法氮化镓驱动器机器人关节模组 源自:企业官网
为模拟人类的灵巧性,单只机械手可集成超过 10 个额外电机,用于控制独立手指与抓取机构,用于驱动每根手指的独立运动,并与视觉、触觉等系统协同完成复杂抓取任务。人形机器人普遍采用48V供电架构,单个关节功率板输出通常达到500W至1kW,这意味着在极小空间内需要处理高功率密度与高频控制的双重挑战。

△用于人形机器人手臂关节的 GaN 功率级参考设计板 源自:新浪科技网
因此,如何在有限体积内实现高效率、低损耗与高频响应,成为人形机器人硬件设计的核心问题。正是在这一背景下,氮化镓(GaN)等新一代功率半导体开始发挥关键作用——其高频、低损耗与高功率密度特性,使电机驱动器能够在更高PWM频率下运行,同时减少发热并缩小系统体积,从而更好地适配人形机器人对“高性能+小型化”的极致需求。
不同关节部位对功率与性能的需求如下:
• 手腕/手部:功率通常为 10 W 至 100 W。
自由度决定运动精度。人类手部约有 27 个自由度,商用机器人手部通常为 6 个,而部分先进的人形机器人手臂(如 Tesla Optimus)可达 25 个。高自由度设计需要密集的电机布局,因此驱动电路的小型化至关重要。通过提高逆变器开关频率,可以有效降低转矩脉动,实现更精准的运动控制。
• 踝部/颈部/肩部:功率需求为 100 W – 300 W,尺寸限制相对较低。
• 肘部:功率需求为 1 kW – 2 kW,重点关注热性能与安全性。
• 膝部/髋部/髋关节中心:功率需求最高,约 2.5 kW – 5 kW。
高频控制,让机器人关节更灵活
为了实现精确控制,电机通常采用磁场定向控制(FOC)算法。这种控制方式依赖多层级控制环路,包括电流(转矩)环、速度环和位置环,并由更高层的运动控制系统统一调度。各个控制环之间层层依赖,且必须满足严格的实时性要求,否则就会出现动作不连贯甚至失衡的问题。
其中,电流环是整个系统的核心,它直接决定电机输出转矩,并通常以8kHz至32kHz的频率运行。电流环的响应速度越快,电机控制就越精准。对于人形机器人来说,一个简单的动作(例如迈步或转身)往往需要数十个关节同步执行,一旦某个关节响应延迟,就可能影响整体平衡。
提升PWM(脉宽调制)频率,是提高电机控制精度的重要手段。当开关频率提升至100kHz量级时,电机电流波形可以更加接近理想正弦波,从而显著降低电流纹波。这不仅提升了控制精度,还能减少电机振动与发热,使人形机器人动作更加平滑自然。
氮化镓(GaN)的材料特性使其具备更小的栅极电容和输出电容,开关速度可比硅基MOSFET快数10倍甚至上百倍,从而在高频条件下依然保持低损耗运行。
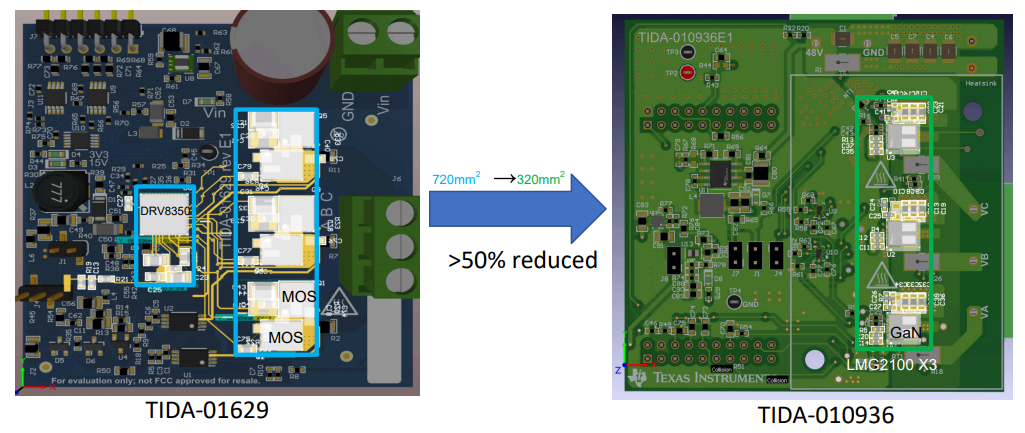
△用于人形机器人手臂关节的 GaN 功率级参考设计板 源自:德州仪器官网
为了在设计中比较 GaN 和 MOSFET,我们可以查看提供类似功率级别的 TIDA-010936 和 TIDA-01629 设计。如上图所示,由于集成了栅极驱动器并降低了 GaN 的 RSP,整个功率器件的芯片面积减小了 50% 以上。
与硅 MOSFET 相比,GaN HEMT 在人形机器人电机驱动逆变器应用中具有以下优势:
• 开关速度可提高 10 倍以上,使电机可在更高频率下运行,降低绕组与铁芯损耗,从而提升整体系统效率。
• 高频率降低转矩脉动,提高转矩控制带宽,实现更平滑、精确的电机控制。
• 更优的性能指标(FoM, Figure of Merit)支持更小型化设计,有利于空间受限应用中的集成式电机驱动开发。
• 增强型GaN 器件无反向恢复电荷,可降低能量损耗并缩短死区时间,从而提升每安培转矩并降低噪声。
• 高频与低损耗特性使得在相同负载电流下电机温升更低,满足无源散热需求。
• 高频特性可替代体积庞大的电解电容,改用体积更小、可靠性更高的陶瓷电容。
• 更高效率与更小尺寸/重量有助于延长机器人电池续航时间。
换句话说,GaN让 “高频+高效率” 不再是二选一,而是可以同时实现。
小空间大能量:GaN赋能人形机器人关节
当人形机器人的关节空间有限。电源板通常是直径为 5-10 cm 的环形 PCB。此外,关节必须集成电机、减速器、编码器甚至传感器。重要的是,设计人员必须在有限的空间内实现更高的功率和更稳定的电机控制。与 MOSFET 相比,GaN 具有更小的 RSP(比电阻、裸片面积尺寸比较),这意味着与具有相同 RDSon 的 MOSFET 相比,GaN 具有更小的裸片面积。
例如,德州仪器 (TI) 通过集成 FET 和栅极驱动器进一步减小了占用空间。这样可以实现 4.4mΩ 半桥 + 栅极驱动器,并且封装仅为 4.5 x 5.5mm。
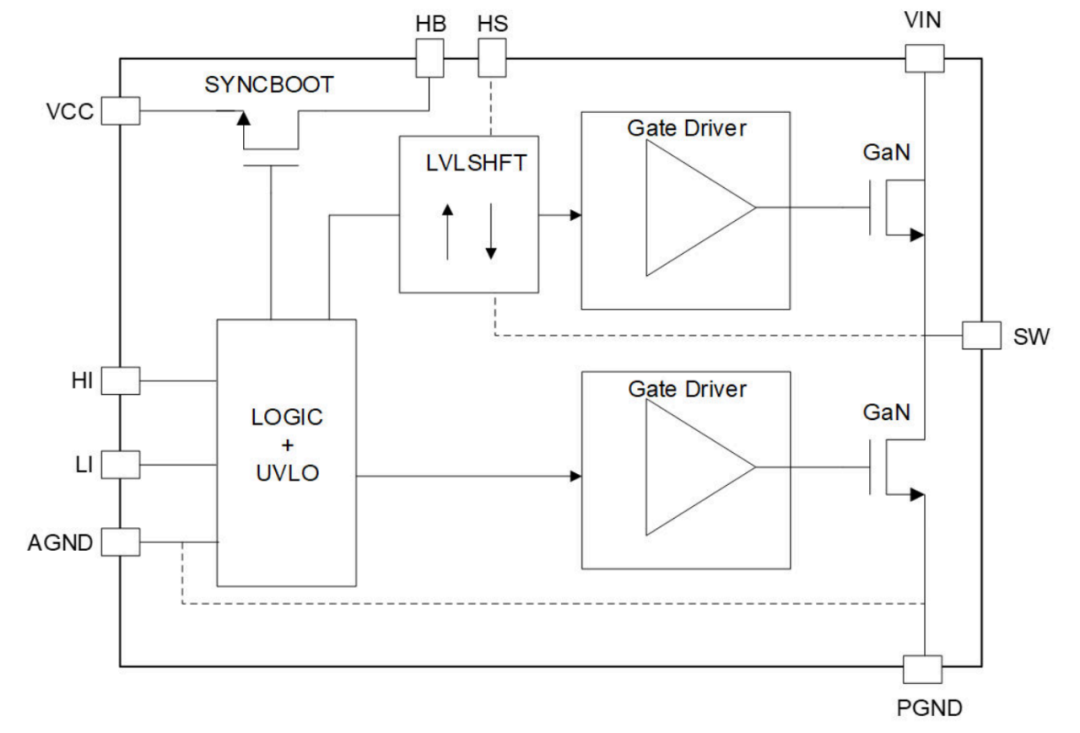
△LMG2100 方框图 源自:德州仪器官网
可以说,GaN不仅优化了“单个关节”,更在重构“整个人形机器人系统”的设计方式。
结语
在人形机器人迈向量产与应用落地的关键阶段,底层功率器件的重要性正被重新认识。氮化镓通过在高频、高效与小型化之间实现平衡,正在打破传统硅器件的性能边界。
它不仅让机器人“动得更精细、更稳定”,也让系统“更轻、更省电、更易集成”。随着技术成熟与成本下降,GaN有望成为人形机器人时代的核心基础技术之一。
从某种意义上说,这场由材料驱动的变革,正在重新定义人形机器人的能力上限。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:


活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
