

电阻式柔性薄膜压力传感器中,三明治电极与叉指电极代表着电流路径和传感机理的根本差异:前者是垂直穿膜式,后者是平面界面式。这决定了它们在灵敏度、线性度、量程、响应速度和长期稳定性上表现出鲜明对比。
但是,具体的不同的敏感层材料、薄膜厚度、电极材料与结构等的具体差异,不同文献会给出不同的结论。因此,本文仅供参考,不同意见者可以下方留言或私下交流。
核心性能对比总览
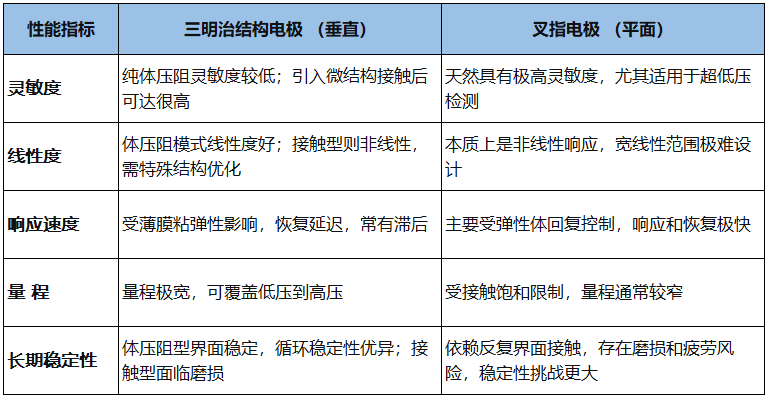
灵敏度 —— 叉指电极天生更易获得“超高”灵敏度
三明治结构的灵敏度来源有两种:
体压阻效应:测量敏感薄膜在厚度方向受压后的体电阻变化。由于材料的体积压缩率极低,这种机制产生的电阻变化微小,灵敏度通常很低(一般<0.1kPa−1),无法满足高灵敏触觉需求。
界面接触效应:在电极或薄膜表面制造微结构(如金字塔、微柱毛)。受压时,上下电极间的接触面积从尖端极小点急剧增大,接触电阻非线性骤降。此模式下灵敏度可提升数个量级,达到甚至超越叉指电极。但这种设计的性能高度依赖微结构的形貌和尺寸。
叉指电极的工作几乎完全基于界面接触电阻调控。在低压下,导电覆盖层(通常是带有微结构的薄膜)与叉指电极的接触点极少,整体电阻极大;轻微压力即可使接触点数量和面积迅速增加,电阻断崖式下降,天然具备极高的灵敏度,特别擅长检测微小压力(如帕斯卡级)。由于电流集中在电极与敏感层的界面极薄区域,对表面形变极为敏感。
结论:未优化的三明治结构灵敏度远低于叉指电极;但通过界面微结构化,两者都能实现高灵敏度。不过,叉指电极实现超高灵敏度的结构设计相对更简单直接。
线性度 —— 三明治结构的体压阻效应天生更优
三明治结构:基于体压阻效应的器件,在弹性形变范围内,电阻变化与应力通常呈良好的线性关系,线性范围宽。而基于微结构接触效应的器件,其电阻-压力关系遵循非线性的接触力学(如赫兹接触),天然呈现指数型或幂律型曲线,线性度差,通常需要通过设计“截断金字塔”等特殊形状来补偿。
叉指电极:其工作机理即为接触面积的扩展,这本身就是一个强非线性过程。虽然通过微结构尺寸梯度、多层结构等设计可以拓宽准线性区间,但要实现宽范围、高线性度极难,其线性范围通常远窄于体压阻三明治结构。
结论:追求宽范围、高线性度的压力检测,体压阻型三明治结构是更优选择。
响应速度 —— 叉指电极恢复更快,滞后更小
三明治结构:在压力的加载与卸载过程中,聚合物敏感薄膜本身的粘弹性会导致形变恢复延迟,产生明显的回滞。对于微结构接触型,微柱间可能发生相互粘附,进一步减慢了恢复速度。这限制了其动态响应能力。
叉指电极:响应主要取决于上覆微结构弹性体的瞬间变形和回复。当压力撤去,弹性模量较高的弹性体(如PDMS)微结构能极快地恢复原状,断开接触。总体过程粘性损耗小,响应和恢复时间常可低至数毫秒甚至更短,更适合检测高频动态压力。
结论:叉指电极在响应速度和动态精度上具有显著优势。
量程 —— 三明治结构可轻松覆盖更宽压力范围
三明治结构:体压阻型器件在薄膜被完全压实致密化之前,电阻会持续变化,通过调整薄膜的厚度和弹性模量,量程可轻松覆盖从千帕到兆帕的极宽范围。即使是微结构接触型,也可通过提高结构硬度和高度来扩大量程,上限远高于叉指电极。
叉指电极:其电阻变化主要发生在接触点从无到有、从少到多的阶段。一旦微结构完全压平,与叉指电极达到满接触,电阻便趋于饱和不再变化。这导致其有效量程较窄,通常局限于低压区(如<100 kPa)。虽然可设计高刚度结构来扩大量程,但会牺牲低压灵敏度的优势。
结论:若需单一传感器检测从轻触到重压的宽域压力,三明治结构是更佳选择。
长期稳定性 —— 三明治的体压阻架构更可靠
三明治结构:纯体压阻模式是一个坚固的、无相对移动的静态体系。只要确保电极、薄膜和基底之间的层间粘附牢固,不产生分层,它的电阻对反复加卸载不敏感,长期循环稳定性极好。但引入微结构接触后,同样面临疲劳风险。
叉指电极:器件性能强烈依赖于精细微结构与电极表面的反复接触-分离动态过程。这会带来三大风险:①微结构的机械疲劳磨损或塑性变形;②电极表面的界面污染或氧化导致接触电阻漂移;③柔性基底与电极的反复形变可能导致黏附力下降或开裂。因此,其长期工作点漂移和失效的风向高于密封良好的体压阻三明治结构。
结论:对使用寿命和信号漂移要求苛刻的场景,理想的体压阻三明治结构稳定性更胜一筹。
选型建议
没有绝对的优劣,选择取决于核心需求:
若追求超低压力检测、极快响应和超高灵敏度(如脉搏波、声纹识别),叉指电极是理想选择。
若追求宽量程、良好线性度和超长循环寿命(如机器人关节压力、重载称重),则基于体压阻效应的三明治结构更合适。
若要兼顾高灵敏与宽量程,可采用复合策略,如使用带有特殊梯度微结构的叉指电极,或采用微结构化的三明治电极,并结合算法校正。
源自:柔性电子与传感器
END
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐:
拟邀企业类型:
报名链接
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
