
本文将对机器人重要环节即丝杆、减速器、电机、传感器、结构件、本体代工概况进行梳理,以供参考。
注*:本文约8000字,阅读完需15min
一、丝杠(成本占比12%)
(一)技术相通性较高,国产化率有望加速提升
· 丝杠是实现精密直线运动的关键部件,是灵巧手、直线关节的核心传动元件,约占机器人成本12%,主要包括:
滚珠丝杠:主要应用在灵巧手。由丝杠、螺母、换向装置和钢球组成的一种传动部件,滚珠丝杠的作用是将回转运动转化为直线运动,或者把转矩转变成轴向作用力,具有摩擦阻力小、传动效率高、轴向刚度高、互逆性好等优势。
行星滚柱丝杠:主要应用在直线关节。与滚珠丝杠结构差异较大,由丝杠、滚柱和螺母组成,通过三者之间的螺旋曲面啮合把直线运动转换为旋转运动或把旋转运动转换为直线运动。在同等尺寸下,与滚珠丝杠相比,行星滚柱丝杠具有更多的接触点,因此具有负载能力高、使用寿命长、传动精度高、传动效率高和空间利用率高等优点。
· 丝杠加工的难点在于热处理、磨削
丝杠的加工工艺流程长、难度大,工序包括下料、球化退火、检验校直、粗加工(车、铣、磨、热处理)、半精加工(半精磨)、精加工(精磨)、检验入库。
· 格局推演:丝杠与零部件技术相通性较高,降本增效趋势下国产化率有望加速。
国外企业在丝杠产品上起步早,产品型号规格齐全,性能领先。根据华经产业研究院,2022年国内行星滚柱丝杠厂商市场份额占比为19%,国外龙头制造商Rollvis、GSA和Rexroth的市场份额占比分别为26%、26%、12%。
虽然国内起步相对较晚,但部分汽车零部件如转向器齿条、座椅水平驱动器HDM、轴承、金属精密件等,在制造工艺上和丝杠的精密螺纹加工、齿轮加工、热处理等具有一定的技术相通性和经验可移植性,所以部分零部件公司能够有效利用其已有的技术储备、成熟的生产管理经验以及稳固的客户关系网络率先抢占市场份额。
· 相关公司
北特科技、浙江荣泰、五洲新春、恒力液压、双林股份、嵘泰股份、贝斯特、福达股份等。
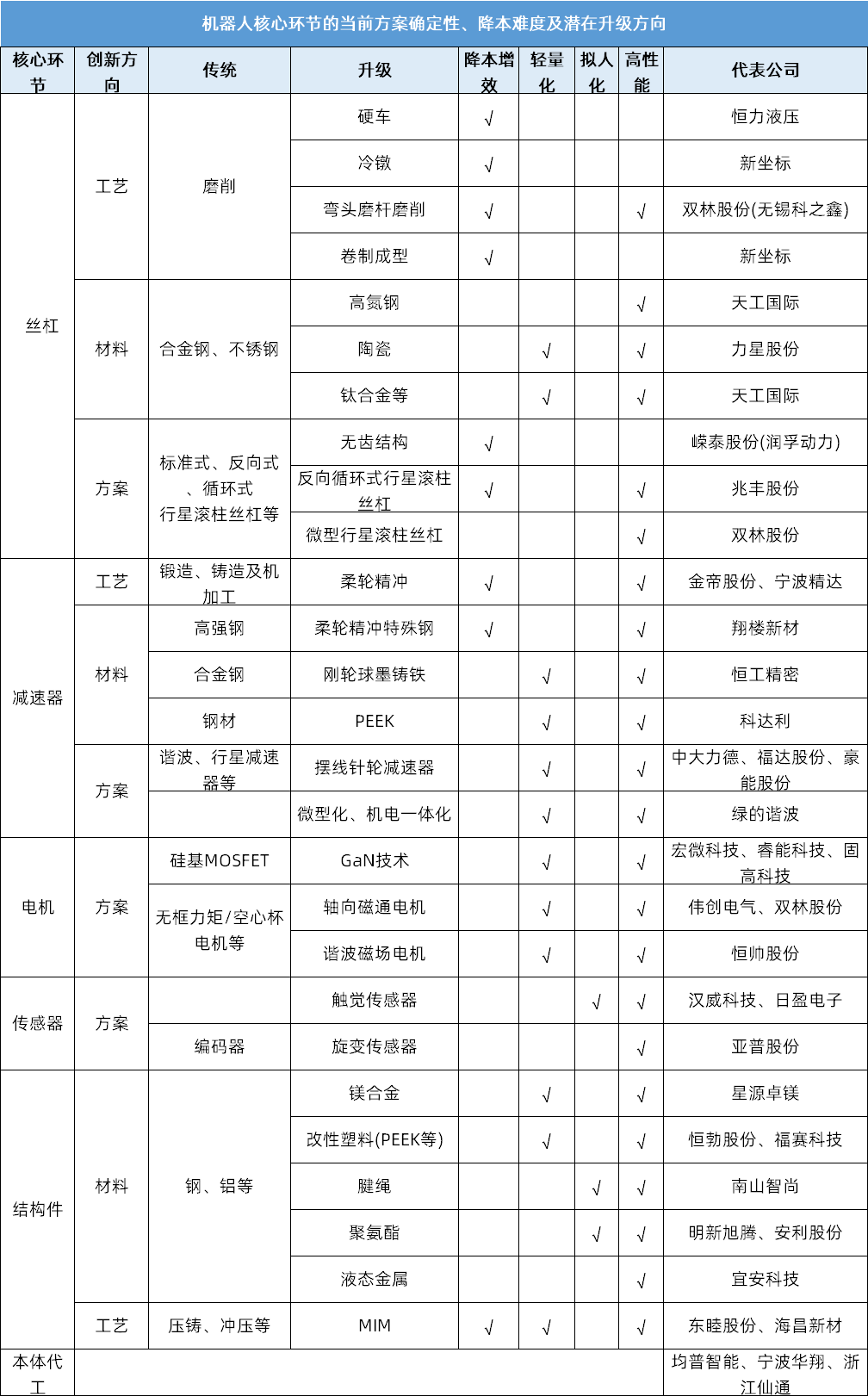
(二)工艺新变化——硬车、冷镦、磨削等
· 丝杠的制造难点主要在螺纹加工上,主流的加工方式是磨削,精度优势明显,但传统磨削设备成本高且时间长,所以丝杠的改进围绕降低成本、提高生产效率,改进方向包括:
硬车(以车代磨) :采用螺纹滚道硬车削技术,最大优势是避免在磨削粗加工螺纹滚道过程中,因切削热导致丝杠硬度降低而引起可靠性差问题的发生,并且加工效率高,无油烟粉尘污染、绿色环保。生产效率相比磨削提高2-3倍,生产率相同时车床的投资是磨床的1/3-1/10、成本降低,以恒力液压为代表。
冷镦(冷精锻):丝杠用冷精锻成型技术的优势在于能够快速成型螺母和丝杠轴,可以减少在切削加工时形成金属废屑,减少原材料损耗,节约原材料成本,此外冷精锻生产的工件形状和尺寸容易控制,可以避免高温导致的外形误差,表面质量和精度较高。兼具加工效率高、材料损耗率低、绿色环保等优点,以新坐标为代表。
弯头磨杆磨削:传统磨杆在加工长径比超过5倍的内螺纹时,会产生振动导致“让刀 ”现象,无法保证精度。弯头磨杆采用柔性软轴带动砂轮高速旋转,转速最高达5万转/分钟,且每个螺距误差控制在0.5微米以内,实现了长径比1:10的内螺纹磨削、精度稳定达到C3级,另外加工时间缩短至半小时、成本降至900元,以双林股份(无锡科之鑫)为代表。
卷制成型:跳出了传统的加工思路,不直接在圆筒内加工,而是先在一块金属平板上加工出倾斜的螺纹牙型和卡扣结构,然后将这块“平板螺母基体 ”卷成圆筒,使卡扣自锁,最后焊接拼接缝形成完整螺母。优点是将最精密的内螺纹加工,从封闭空间转移到了开放的平面,避免了深孔加工的限制,理论上能显著提升加工效率和一致性,以新坐标为代表。

(三)材料工艺新变化——高氮钢、陶瓷、钛合金等
· 传统丝杠材料以合金钢(高碳铬轴承钢等)、不锈钢为主,材料迭代方向围绕性能提升、轻量化等,新材料包括:
高氮钢:具有高强、高韧、高耐蚀、高耐磨和抗疲劳等多重优势,以天工国际为代表。
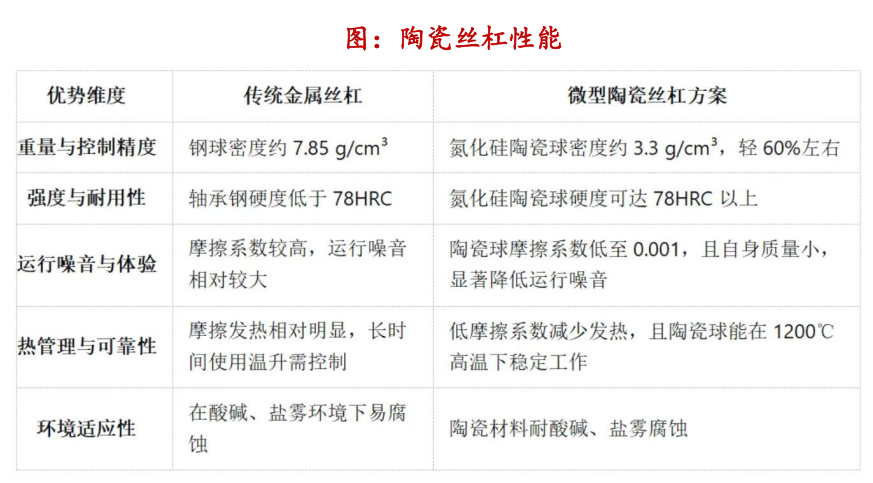
陶瓷:用氮化硅等陶瓷球替代传统钢球,丝杠和螺母仍使用金属,陶瓷材料硬且脆、加工难度高,复合结构更合适。陶瓷丝杠是具备轻量化、高强度、低噪音、低发热等优点的新型部件,能够降低运转噪声,减少关节发热,显著优于传统微型丝杠,在人形机器人灵巧手等高精度、小体积的应用场景中展现出重要的应用价值,有望成为未来微型丝杠的重要发展方向,以力星股份为代表。
钛合金等:可以通过采用轻质高强度材料如钛合金、铝合金和碳纤维复合材料,显著降低丝杠重量,同时保持较高的强度和可靠性。钛合金的密度仅为钢的57%、比钢轻40%,但抗拉强度却相当,适合用于高负载工况。
(四)方案工艺新变化——无齿结构、反向循环式、微型行星滚柱丝杠
· 目前行业依然在创新更低成本的、更容易量产的丝杠新方案,包括无齿行星滚柱丝杠、反向循环式行星滚柱丝杠:
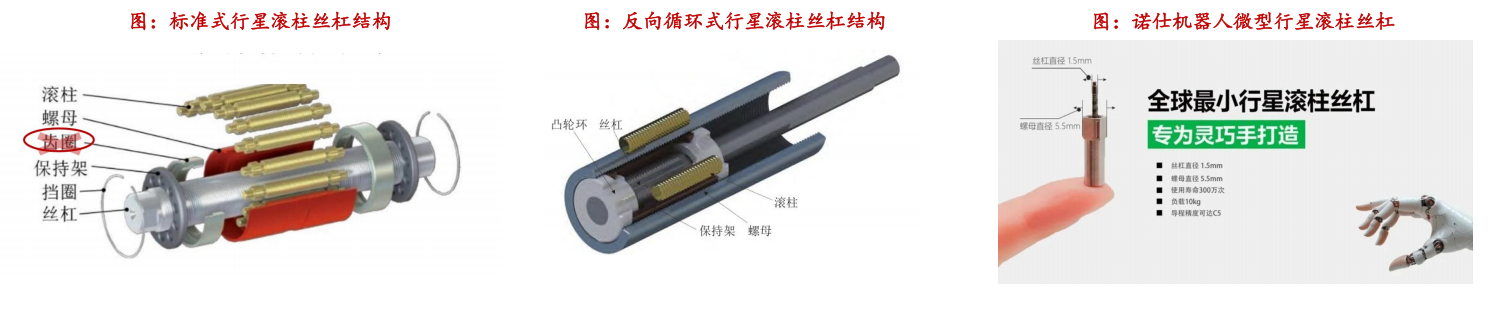
无齿行星滚柱丝杠:包括丝杆、螺母、行星架组件和多个滚柱。小滚柱两端的齿圈换成了环槽,取消了小滚柱的齿轮结构,采用滚柱两端的环槽与螺母内环牙的配合替代啮合功能,从而不需要复杂的多圈齿轮加工,可以节省设备和装配时间,以嵘泰股份(润孚动力)为代表。
反向循环式行星滚柱丝杠:由螺母、滚柱、丝杠、凸轮环和保持架等零件组成,通过电机驱动螺母旋转,实现丝杠轴向直线输出。具体传动原理为:螺母通过与滚柱的螺纹啮合将动力传递给多个滚柱,滚柱通过与丝杠的螺纹啮合带动丝杠做轴向直线移动。其中滚柱在整个过中既自转又绕丝杠公转,而且当滚柱自转并公转至丝杠无螺纹区时,先脱离与丝杠螺母螺纹啮合,然后在凸轮环以及保持架的作用下完成复位运动,重新进入螺纹啮合区。结合循环式行星滚柱丝杠导程小精度高、结构简单、易于加工的特点,及反向式行星滚柱丝杠螺母与电机融合设计、结构更为紧凑的特点,更适合人形机器人线性关节领域的应用及实际加工经济性需求,以兆丰股份为代表。
微型行星滚柱丝杠:滚柱丝杠微型化时,滚柱数量依然要保持数个到十几个,每个滚柱的螺纹沟槽宽度仅为0.1-0.2毫米,滚柱与丝杠间的配合间隙须控制在几微米以内。每一根滚柱丝杠的啮合结构相当于一个“微型齿轮系统 ”,而所有零件必须在极其狭小的空间内同时精确运转,可应用于灵巧手,以双林股份为代表。

二、减速器(成本占比12%)
(一)国内外供应商差距逐步缩小,可从齿轮、轴承等零件切入
· 减速器是连接动力源和执行机构的中间机构,通过不同大小齿轮的啮合传递动力,约占机器人成本12%,主要包括:
谐波减速器:主要应用于机器人上肢腕部、肘部等,是目前机器人减速器的主流方案,由波发生器、柔轮和刚轮组成,具有单级传动比大、体积小、精度高、回差小等优点,适合空间受限的关节部位,其性能直接决定机器人的运动精度与使用寿命。
行星减速器:适合用于手部,由太阳轮、行星轮、内齿圈和行星架组成,具有结构紧凑、承载能力强、传动效率高等优点。
RV减速器:适合负载较大的基关节部位,如髋关节、肩关节等,主要分两级减速,两级减速共同实现高减速比和高精度,具有更高的刚性和扭矩承载能力。
· 减速器制造在工艺、材料上均有壁垒,不同减速器的难点各有侧重:
1)谐波减速器主要难点在于选择合适的柔轮材料、齿形与加工工艺(热处理等)以保证柔轮的使用寿命;2)行星减速器主要难点在于对加工精度要求高;3)RV 减速器主要难点在于大量高精度的零部件需极高的加工精度与装配技术。
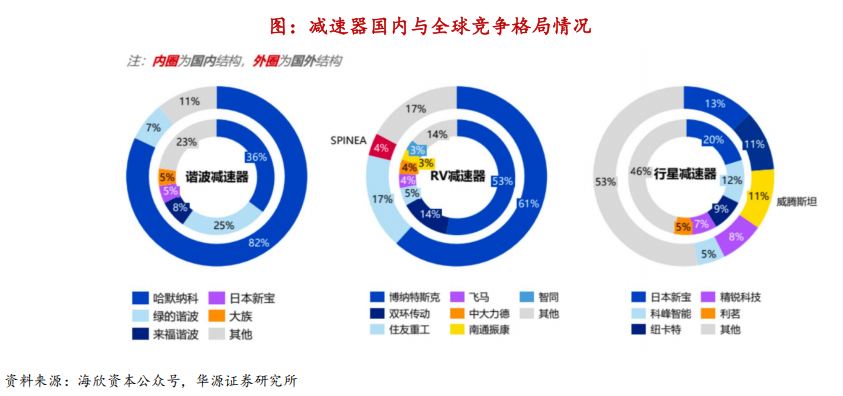
· 格局推演:国产化率较低但国内外供应商差距逐步缩小,部分供应商有望从齿轮、轴承等零件优先切入。
海外减速器供应商仍占主导地位,1)谐波减速器:哈默纳科国内市占率约36%,第二名为绿的谐波市占率约25%,其他供应商如日本新宝、来福谐波份额均不足10%。2)行星减速器: 日本新宝国内市占率为20%,其次为科峰份额为12%,整体行业较为分散。3)RV减速器:纳博特斯克国内市占率53%,其次是国内厂商双环传动市占率为14%。
国内龙头公司如绿的谐波、双环传动等产品性能逐步接近海外供应商,另外部分国内供应商可以通过减速器中的齿轮、轴承等细分部件切入。
· 相关公司
绿的谐波、双环传动、福达股份、豪能股份等。
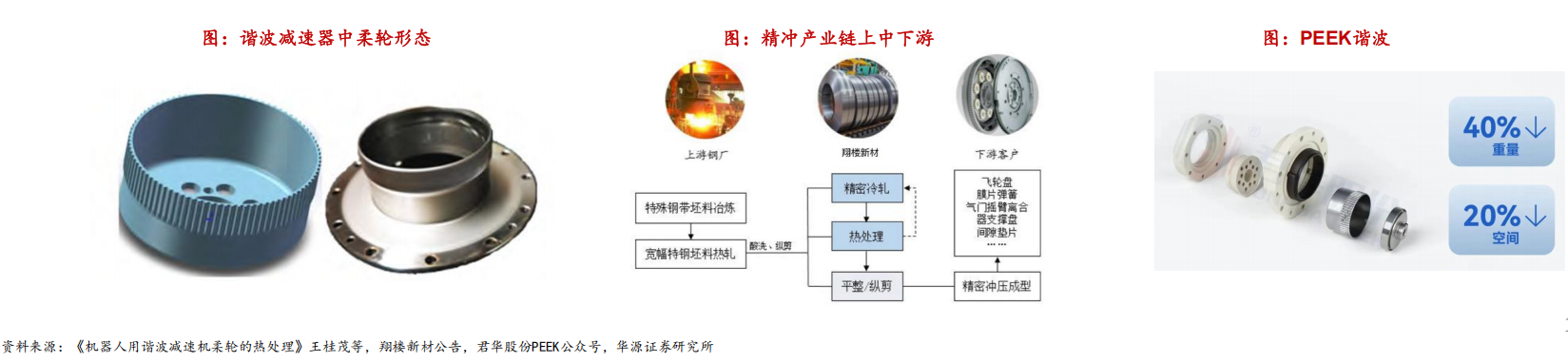
(二)谐波新变化——柔轮精冲、刚轮球墨铸铁、PEEK谐波等
柔轮工艺变化——精冲工艺:柔轮是谐波减速器价值量最高的核心部件,是实现高减速比、高精度的关键所在。传统锻造等工艺加工的柔轮材料利用率较低,总体上限制了产品的降本,导致谐波减速器在机器人中的成本占比较高。与传统锻造、铸造及机加工等工艺相比,精冲技术具有精度高、生产效率高、成本低、能耗少的特点,以金帝股份、宁波精达为代表。
柔轮材料变化——精冲特殊钢:精冲工艺对原材料要求高,需要使用特殊钢材料,经过精密冷轧及热处理等工艺生产实现特定厚薄精度、表面质量以及性能参数要求,核心优势在于降本增效,另外传统棒材加工的柔轮疲劳性能无法满足客户需求,而精冲在降本增效的基础上进一步优化了疲劳性能,以翔楼新材为代表。
刚轮材料变化——球墨铸铁:柔轮材料采用的高强钢,其硬度通常高出与之啮合的刚轮3-7HRC,对刚轮的耐磨性提出考验。相比于传统合金钢,球墨铸铁具有易切削、 自润滑、耐磨的优异特性,并且基体组织中石墨球的存在,减重可达5%-10% ,可为谐波减速器精度保持能力的提升和轻量化需求提供支持,以恒工精密为代表。
谐波材料变化——PEEK:采用PEEK材料的刚轮与钢材的柔轮啮合时,可在保证传动精度的同时,实现系统减重、提升耐磨性及降低运行噪音的综合优势。此外,人形机器人的谐波减速机组件也可以使用PEEK进行制造,可以达到减重40%压缩空间20% ,以科达利为代表。
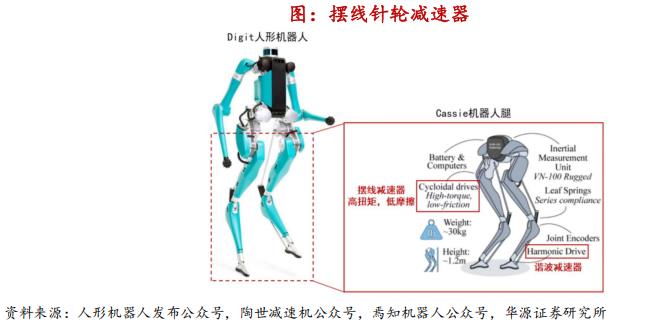
(三)方案新变化——摆线针轮、微型化、机电一体化等
· 减速器的方案变化方向:1)继续朝高精度、大扭矩、高效率、小体积方向迭代;2)机电一体化,将减速器与电机、编码器、传感器等组合,提供高附加值模块化产品。
摆线针轮减速器:兼具精度、负载、重量的优势。兼具减速比大、传动效率高、传动精度高、承载能力强、成本相对适中等特点,较行星精度更高、较谐波负载能力更强、较传统 RV 体积重量更小,有望成为人形机器人减速器迭代的新方向之一, 以中大力德、福达股份、豪能股份为代表。
结构:靠少齿差+多齿啮合传动,核心部件是摆线轮(外齿圈,齿廓为短幅外摆线)、针轮(固定在壳体内的针齿)、偏心轴(输入轴)。
原理:电机带动偏心轴转动,偏心轴带动摆线轮围绕针轮中心公转;由于摆线轮齿数比针轮少1-2个,公转时会被针轮反向推动,实现自转。最后通过输出机构把自转运动传递出去,就像两个齿轮啮合,齿数少的齿轮转得快,通过结构设计把“快转 ”变成慢转。
环面包络减速器:可以平衡微型化与高扭矩。基于环面包络多齿啮合传动技术,多齿啮合设计使有效接触面积高达85%,接触面积提升至传统结构的3倍以上;扭矩密度高达500Nm/kg,远超同类产品;采用4.5-10mm中心距的环面包络蜗杆,体积较传统方案缩小40%,重量仅9-49g,却可实现1-3N ·m的强大扭矩输出。
微型化设计:结构紧凑、精度高、重量轻,能够在保证精度的同时较大限度释放机器人关节的空间,以绿的谐波为代表。
三、电机(成本占比20%)
(一)国内供应商有望通过布局新方案实现弯道超车
· 电机是机器人动力核心来源,约占机器人成本20%, 目前关节电机主要采用无框力矩电机和空心杯电机:
无框力矩电机:主要应用于旋转关节以及线性关节部位,具备较高的工作效率,整体结构简洁紧凑,单位扭矩数值较大, 日常维护较为简便,运行过程中也能保持较低的噪音水平。
空心杯电机:主要应用于灵巧手,技术门槛相对较高,其中最关键的技术难题是空心杯线圈的绕组成型工艺,并且对零部件的精密制造精度有着极高的要求。随着灵巧手自由度增加,空心杯电机数量同步增加。
· 格局推演:国内供应商对机器人关节电机新方案积极布局,有望实现弯道超车。
无框力矩电机的核心技术在于磁路设计与工艺制造,海外企业起步早,积累了丰富的经验,市场份额由海外主导,包括科尔摩根(美)、威腾斯坦(德)、尼得科( 日)、派克汉尼汾(美)、MAXONMOTOR(瑞士)等。空心杯市场由德国FAULHABER与瑞士MAXONMOTOR主导,随着国内市场对空心杯电机认知程度不断提高,国产厂商的量产工艺水平不断突破,未来有望实现国产替代。
· 相关公司:
步科股份、卧龙电驱、伟创电气、鸣志电器、兆威机电、伟创电气、信质集团、恒帅股份等。
(二)方案新变化——GaN技术(微型化)、轴向磁通电机、谐波磁场电机
· GaN技术:关节电机驱动板上的功率开关正在从硅基MOSFET切换至GaN,氮化镓(GaN)技术可以将驱动做到更小,并提高能效,整体部件也会减轻,进一步有助于提升续航。当前主流人形机器人单机约含40个关节电机,其GaN器件用量因关节大小而异,小关节(如手指)用量较少(3-6颗)、中等关节(如肘)用量中等(约12颗)、大关节用量最多(24颗),单台机器人的基础GaN用量达到约300颗,当引入如五指灵巧手、腰部扭转等更复杂的自由度后,单机GaN用量或将显著攀升至1000颗以上。 目前,智元人形机器人已在脖子、手肘等关键活动关节的3个电机中应用GaN器件,每个电机集成3颗GaN芯片,GaN器件已装配至数百台人形机器人,以宏微科技、睿能科技、固高科技为代表。
· 轴向磁通电机:利用沿轴向传播的磁场将电能转换为机械能,单位体积内的磁通量较高,在相同尺寸下可以提供更高的扭矩密度,具备高效、紧凑的特点,以伟创电气、双林股份为代表。
· 谐波磁场电机:通过磁场调制效应,使得在外特性上与机械减速齿轮箱类似,转矩新增放大系数“极比 ”(电机旋转部分极对数和电枢绕组极对数之比),从而可在相同材料选型和散热条件下大幅提升电机转矩密度,有望广泛应用在人形机器人关节及灵巧手部件,以恒帅股份为代表。

四、传感器(成本占比34%)
(一)六维力传感器国产化率有望持续提升
· 力矩传感器:一般单台人形机器人配备4个(手腕、脚踝各2个)六维力传感器、28个关节力矩传感器,占整机成本约34%。其中,六维力传感器是多维力传感器中价值量最高、功能最全面的产品,具有高精度、高灵敏度、高带宽、高可靠性、小体积、轻质量等优点,安装在手腕、脚踝关键部位,能实时捕捉外界施加的三维力(前后、左右、上下)和三维力矩(扭转、倾斜、摆动)。
· 格局推演:当前六维力传感器出货不多,国产厂商与外资品牌的差距正逐步缩小,未来国产化率有望提升。根据MIR 睿工业《2025年中国六维力传感器市场报告》,2024年中国六维力传感器整体市场出货量突破1.4万台,预计2027年起中国六维力传感器市场将迎来实质性放量阶段,到2030年整体市场出货量将超过百万台。尽管六维力传感器的技术壁垒较高,国内能实现量产的厂商较少,但随着越来越多的国产企业加大行业投入,未来国产企业或将占据六维力传感器市场的绝大部分,并将主要产品降本普及和在人形机器人中导入,未来国产化率有望呈上升趋势,上升空间大。
· 相关公司:
柯力传感、安培龙、凌云股份等。


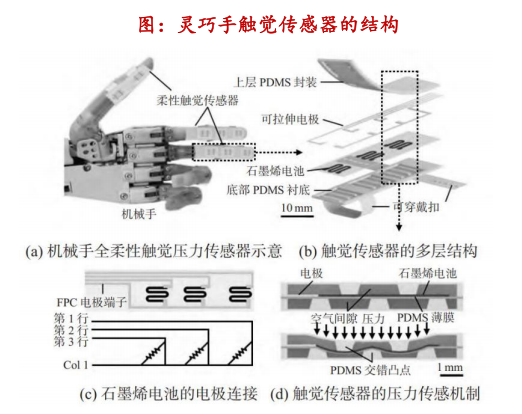
(二)新变化——触觉传感器、旋变传感器
· 触觉传感器:能够感知物体接触、压力、纹理、温度等物理信息的传感器,通过模拟人类的触觉系统,提供触觉反馈,能够实时检测外界的触摸或力变化,并将这些信息转化为电信号,供设备处理。其中,柔性触觉传感器使用柔性材料,能够适应复杂、弯曲的表面,常见于智能手套、机器人皮肤等应用,以汉威科技、 日盈电子为代表。
· 旋变传感器:角度位移传感器,测量旋转物体 (包括电机)的角速度和位置,能够将检测到的旋转角度信息转换为模拟信号输出,当应用于无刷直流电机和步进电机控制系统中时,配合能够处理输出模拟信号的微控制器,可以实现极其精确的电机控制,可在机器人腕部、肘部、肩部等核心关节部位采用“磁编码+旋变器 ”双编码器架构,通过在电机本体与减速器终端输出点位双重部署,提升关节动态纠错能力与集成度,改善精度,以亚普股份为代表。

五、结构件:新变化——镁合金、改性塑料、腱绳、聚氨酯、液态金属、MIM
· 当前主流人形机器人续航普遍2-4小时,体重多在40-70kg之间,轻量化、拟人化是解决运动失衡、散热问题的重点,潜在升级包括:
镁合金:用镁合金制造机器人壳体、骨架,可在保证强度的前提下,实现最大化减重。镁合金的阻尼性能是铝合金的5倍,能有效吸收机器人运动中的震动,保护内部精密元件,同时提升操作稳定性。另外,具备高效散热及优异电磁屏蔽能力,以星源卓镁为代表。
改性塑料(Peek等):具有耐高温、耐腐蚀等性能,易于注塑成型、挤出成型和切削加工等,可作耐高温材料和电绝缘材料。PEEK能契合机器人机械强度和高温性能的要求,可应用在结构件(肢体骨骼与关节、机械臂)、传动与连接部件(齿轮与链条、轴承与螺栓)、防护与外壳(传感器和执行器外壳、装饰部件)、能源与储能部件(电池外壳与绝缘部件),以恒勃股份、福赛科技为代表。
腱绳:腱绳通常由高强度的材料如钢丝、尼龙线或者超高分子聚乙烯纤维(UHMWPE)等组成,通过一系列的滑轮和齿轮系统进行精确的力传递。当前,特斯拉Optimus Gen3灵巧手采用UHMWPE。灵巧手的腱绳驱动系统具有高效能、良好柔性等特点,以南山智尚为代表。
聚氨酯TPU:在机器人皮肤应用中具有优异的柔韧性和可拉伸性、出色的轻量化特性、卓越的能量吸收能力、可通过动态化学键改性实现自修复功能、具有良好的生物相容性和加工性,通过将柔性传感器嵌入TPU基底,机器人能够感知压力、温度、湿度等多种物理刺激,以明新旭腾、安利股份为代表。
液态金属:凭借高导电/导热性、生物相容性及流体特性成为前沿功能材料,可应用于软体机器人、柔性电子及生物医疗领域,以宜安科技为代表。
MIM:一种新型粉末冶金近净型成型技术,将固体粉末与有机粘结剂均匀混练,经制粒后在加热塑化状态下(~150℃)用注射成形机注进模腔内固化成形,然后用化学或热分解的方法将成形坯中的粘结剂脱除,最后经烧结致密化得到终极产品,其生产的结构件(金属结构零件)具有小型化与轻量化、结构特性强、尺寸精度高、表面质量优异等特点,具备将小型复杂零件一体化成型的能力,以东睦股份、海昌新材为代表。
六、本体代工:有望培育出机器人领域的“ 富士康 ”
· 当前机器人代工领域逐渐形成了三种主要模式:
ODM模式:以领益智造为代表,提供从核心零部件到整机组装的一站式服务,公司提出“核心零部件研发-硬件服务-场景落地 ”的三位一体战略,在深圳总部打造机器人“百货市场 ”。
合资联盟模式:如均普智能与智元机器人合资成立公司,实现专业分工与资源互补。这种模式能够快速整合技术、资金与市场资源,加速机器人量产进程。
生态集群模式:如顺德机器人产业形成的“上下楼就是上下游 ”集群效应、中鼎股份等安徽机器人产业集群,通过地理集聚降低供应链成本,提高响应速度。
· 格局推演:
未来几年,机器人代工领域或将重现消费电子代工产业的演进路径:从分散到集中、从简单组装到复杂模组、从标准产品到定制解决方案,能够提前布局全产业链能力、构建全球化供应链网络的企业,有望在这场机器人制造竞赛中占据先发优势。
· 相关公司:
领益智造、均普智能、宁波华翔、浙江仙通、中鼎股份、博众精工、禾川科技等。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
