
一、头部关节选型
头部核心需求是低负载+灵活转动+轻量化,主流选型方案:
-
自由度配置:一般采用2-3自由度设计(俯仰+偏航,部分增加滚转实现全向转动) -
关节类型选型: -
谐波减速器关节:是当前主流方案,体积小重量轻、背隙小精度高,满足云台级转动精度需求,适配头部轻量化低负载特性 -

-
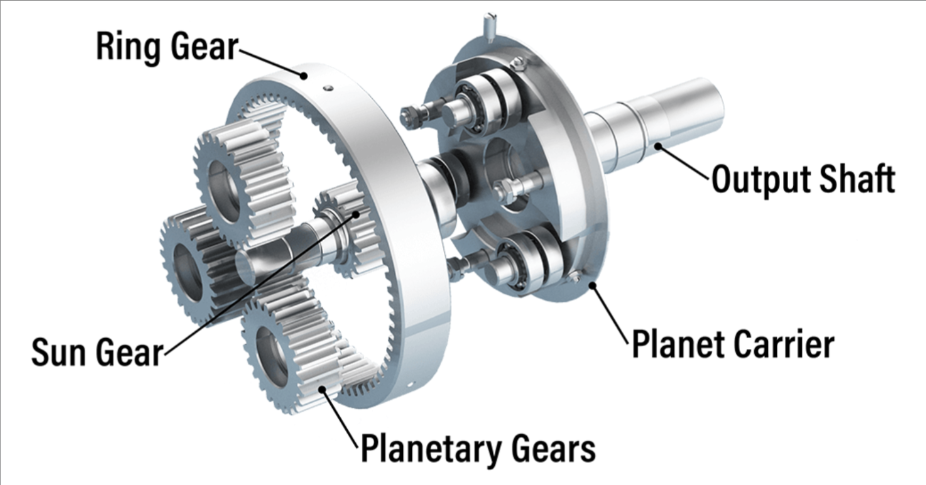
小型行星关节:成本比谐波更低,可靠性更高,适合对成本敏感的量产机型,满足基础转动需求 -

-
直驱关节:仅用于高端拟人型机器人,可实现更柔顺自然的转头动作,成本高属于小众方案 -
二、手部关节选型

手部核心需求是微型化+高精度力控+多自由度,适配精细操作需求:
-
自由度配置:五指灵巧手一般为12-20自由度,单手指2-3自由度 -
关节类型选型: -
灵巧手微型关节:是当前主流方案,采用「微型伺服电机+微型减速器+柔性触觉传感器」的微集成架构,在极小体积内实现高精度力控与位置控制,是决定人形机器人精细化操作能力的核心部件 -
绳索驱动关节:适用于欠驱动灵巧手设计,通过绳索串联传动减少电机数量,降低手部重量和复杂度,成本更低但操作精度弱于集成式微型关节 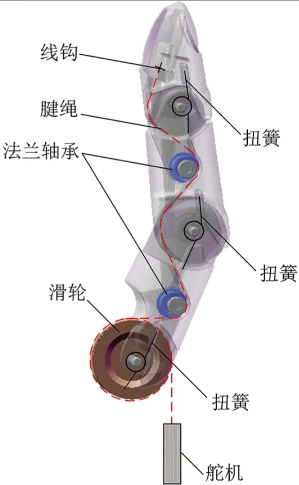
-
形状记忆合金/压电陶瓷微关节:属于研发中的新型方案,无需减速器,可实现更极致微型化,目前未大规模量产.
三、腰部关节选型
腰部核心需求是大扭矩输出+高抗冲击+高结构刚度,承担躯干整体负载:
-
自由度配置:一般为2-3自由度(俯仰+偏航+滚转),实现躯干姿态调整,提升行走稳定性 -
关节类型选型: -
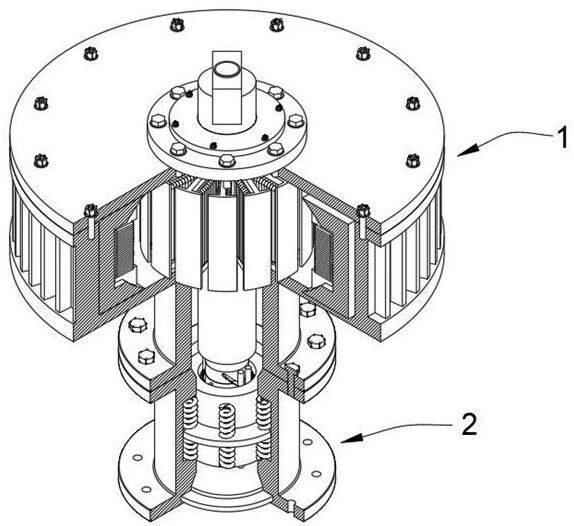
RV减速器关节:是人形机器人腰部的首选方案,属于核心负重关节,RV减速器凭借两级传动结构,具备高负载能力、强抗冲击性、长使用寿命的特点,完全满足腰部大扭矩承载需求 -

-
行星减速器关节:性价比更高,成本比RV低30%以上,是中端量产机型的主流方案,传动效率可达95%以上,完全满足腰部负载需求 -
-
3-DOF耦合腱驱动腰部关节:属于学术研究方案,可实现更大运动范围,提升单足支撑阶段稳定裕度,尚未大规模量产应用
四、脚部/脚踝关节选型
脚部核心需求是高动态响应+抗冲击+适配地形调整,保障行走稳定性:
-
自由度配置:单脚脚踝一般为2-3自由度(背屈/跖屈+内翻/外翻,部分增加内旋/外旋) -
关节类型选型: -
准直驱/直驱关节(QDD):是当前足式人形机器人脚踝的主流高动态方案,采用极简架构,降低传动摩擦,实现高精度无传感器力控,适配对动态性能要求高的足式行走,可更好适应不平整地形 -
RV/谐波混合关节:传统工业人形机器人多采用该方案,谐波负责踝关节小扭矩灵活转动,RV负责承载腿部整体负载,可靠性高但动态柔顺性弱于直驱方案 -
并联机器人关节:属于研究热点方向,针对脚踝2-3自由度需求设计并联结构,具备更高刚度和精度,目前处于试验验证阶段
各部位选型汇总对比表
例子:当前量产主流的1.7米身高、70kg体重、负载5kg的通用服务型人形机器人为例,整理各部位关节的具体选型参数:
头部关节参数选型
手部(五指灵巧手单指关节)参数选型
腰部关节参数选型
脚踝单关节参数选型
如果是更大负载(比如工业人形、负载10kg+)或者更小的教育人形机器人,可以按比例调整输出扭矩:负载提升1倍,对应关节额定扭矩大约提升1.2~1.5倍;小体型人形可以按体积比例缩小参数。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
