
概述
本文针对人形灵巧手五类主流传动架构,建立统一纯技术分析维度:工作原理、结构布局、动力链路、动力转化、核心构件、反驱特性、锁止原理与自锁能力、人机刚度特性、核心控制难点、产热机理、散热痛点、标准化散热方案、技术优劣性。
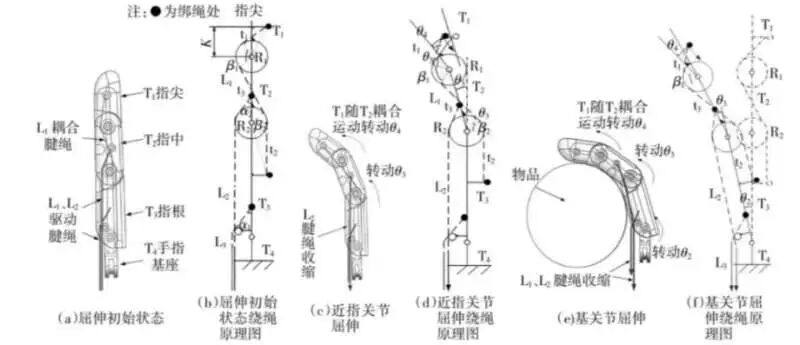
1 绳驱传动(线驱)
1.1 动力链路、动力转化、核心构件
动力链路:后置驱动电机 → 减速器 → 绳轮 → 钢丝绳/鲍登线 → 指尖关节
动力转化形式:电机旋转机械能 → 绳索单向拉力 → 关节弯曲摆动位移
核心传动构件:驱动电机、减速模组、绳轮、钢丝绳、导向滑轮、护套、回弹弹性元件
1.2 工作原理与结构布局
驱动电机、减速器、驱动电路板统一后置布置于前臂/手腕区域,完全远离手指执行末端。依靠电机正反转收放钢丝绳,通过固定滑轮、导向护套传递单向拉力,实现指节弯曲运动;关节复位依靠对拉绳索结构或内置回弹弹性元件。
结构分为两类:裸线短距传动结构、鲍登护套长距传动结构,为当前轻量化仿生手主流远距离传动形式。
1.3 反驱特性 & 人机刚度特性
传动链路以柔性拉力传递为主,抱闸释放状态下无机械刚性约束、无反向机械锁止阻尼。
外部作用力可直接被动推动手指发生形变,具备全程被动缓冲与自适应碰撞柔顺特性。
人机接触刚度低,天然具备被动安全交互属性,无刚性冲击风险。
1.4 锁止能力与自锁原理 & 保力发热
- 锁止形式:有源电气抱闸锁止,无机械自锁定结构
- 锁止机理:依靠电机电磁抱闸抱死输出轴,固定绳轮转角位置,实现姿态保持
- 断电特性:断电后抱闸释放,传动链完全解锁,无任何机械保持力,手指可自由形变塌陷
- 保力热特性:静态姿态保持仅依靠电控维持,机械端无损耗,指尖无附加温升,整机静态发热极低
1.5 核心控制难点
长距离柔性传动链路存在固有张力漂移问题;滑轮、护套接触摩擦造成传动滞后与回程误差;环境温度变化引发钢丝绳微变形,进一步加剧张力偏移,需要持续张力闭环动态补偿,控制耦合变量多、标定频次高。
1.6 产热机理
1. 主热源:前臂后置驱动电机、功率驱动板工作焦耳损耗热
2. 次热源:绳索往复弯折、护套滑移、滑轮转动摩擦产生的机械损耗热
3. 热源分布特征:热源全部集中于前臂开阔区域,手指执行端无内置发热源
1.7 散热痛点
摩擦热量可沿绳索、护套向掌心传导,无专属定向导热通路;腕部往复运动易扰动局部空气流场,破坏前臂自然对流稳态条件;长期循环工作会加速线缆老化,进一步放大传动张力误差与运动偏差。
1.8 标准化散热解决方案
1. 结构层面:前臂保留开放式风道结构,保障基础自然对流条件;电机外装轻量化散热鳍片,增加风扇,强对流换热提升表面换热能力
2. 材料层面:护套采用低摩擦、耐温稳定材质,降低摩擦产热同时阻隔热量向指尖传导
3. 局部均热:滑轮摩擦集中点位增设导热垫片,疏导局部聚集摩擦热,避免局部热累积
1.9 技术优缺点
优点:指端无热源、指尖运动惯量小、仿生自由度高、被动柔顺性好、可完全反驱;整机散热条件优良,温度漂移对末端运动精度影响可控。
缺点:绳索形变与摩擦损耗为结构固有特性,无法彻底消除;需要定期张力标定,长期传动稳定性有限;无机械无源自锁能力,姿态保持依赖持续通电与电控锁止。
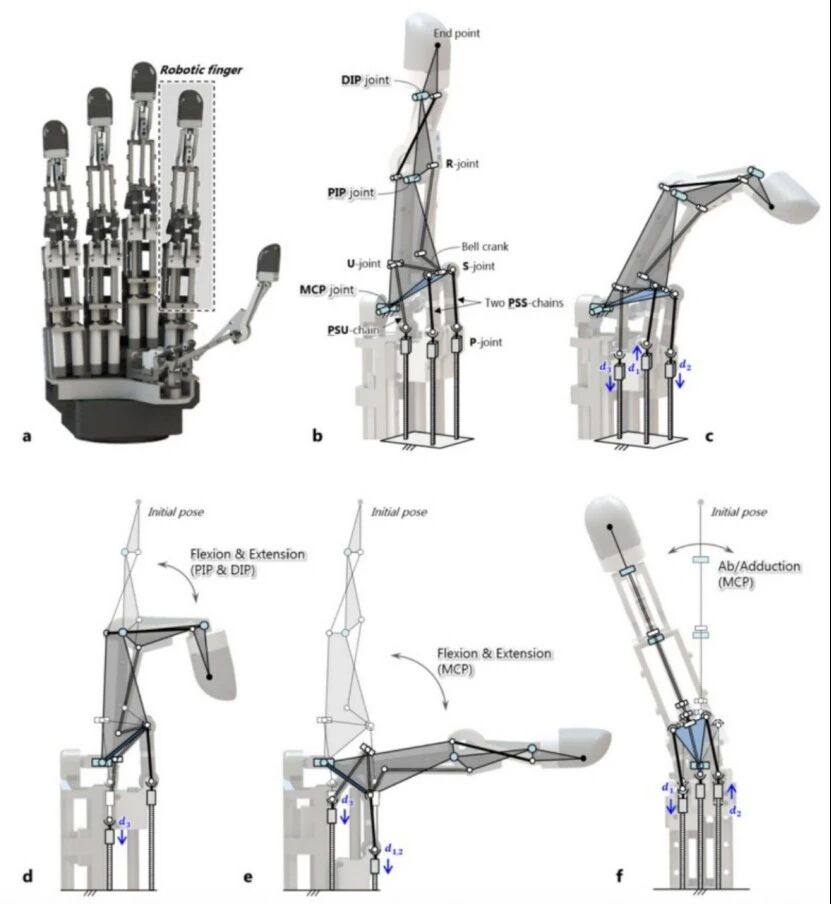
2 连杆刚性传动
2.1 动力链路、动力转化、核心构件
动力链路:掌心驱动电机 → 齿轮减速模组 → 曲柄构件 → 多组铰链连杆 → 指尖关节
动力转化形式:电机高速旋转 → 齿轮降速增扭 → 连杆平面摆动机械位移 → 指节屈伸
核心传动构件:驱动电机、减速齿轮组、曲柄摇杆、铰接销轴、刚性传动连杆、轴承
2.2 工作原理与结构布局
驱动电机集成布置于掌心根部区域,依托曲柄摇杆、多组刚性铰链连杆机构实现动力传递,通过机械闭环约束限定指节运动轨迹,可在减少驱动电机数量的前提下完成多指节协同屈伸运动。
定义隔离说明:本方案为纯齿轮-连杆刚性传动体系,全程无丝杠、无直线推杆;丝杠电缸末端的小型转接连杆不属于本类传动架构,二者机理、自锁特性完全独立,无技术交叉。
2.3 反驱特性 & 人机刚度特性
多级齿轮减速机构串联刚性连杆铰链构成闭环传动链,正向传动存在齿轮啮合阻尼、铰链销轴摩擦阻力双重反向阻滞。
仅当外部施加极大过载外力,克服齿轮啮合摩擦、连杆机构死点阻力后,关节才会发生被动偏移;常规人机交互、轻中度负载冲击下无法反向撬动关节,不具备被动反驱、缓冲形变能力。
人机接触刚度高,人机交互全程为刚性接触,无自适应柔顺特性。
2.4 锁止能力与自锁原理 & 保力发热
- 锁止形式:阻尼辅助保位,无原理级机械自锁,存在明确外力承载上限
- 锁止机理:依靠减速齿轮啮合摩擦阻尼、连杆铰链转动摩擦阻力形成反向阻滞力矩,抵消常规自重、轻载带来的反向倾覆力矩,维持当前关节角度;该阻滞仅为摩擦阻尼滞涩效果,并非结构不可逆自锁。
- 断电特性:断电后电机无输出力矩,仅依靠传动副摩擦阻力维持姿态;仅能稳定保持自重、轻负载工况;若外部施加超过摩擦阻滞极限的外力,齿轮与连杆会被反向推动,关节姿态发生滑移、回弹偏移。
- 保力热特性:静态轻载保位无需电机通电输出力矩,无电控焦耳损耗,轻载静态保位零功耗、零发热;重载持续夹持时摩擦阻尼不足以抵消反向力矩,必须电机持续通电维持力矩,产生持续发热。
2.5 核心控制难点
多关节机械强耦合,单指独立运动解耦难度大;零部件加工公差、铰链装配间隙会直接映射为末端位置误差;多台设备批量装配一致性管控难度较高;摩擦阻尼存在个体差异,外力临界偏移阈值不统一。
2.6 产热机理
1. 主热源:掌心内置驱动电机、齿轮减速模组工作损耗热
2. 次热源:销轴、铰链、轴承往复回转运动产生的持续摩擦热
3. 热源分布特征:热源集中于掌心密闭腔体内部,发热区域固定且封闭
2.7 散热痛点
高密度连杆结构挤占掌心内部空间,无法布置主动散热结构;关节腔体近乎密闭,内部摩擦热量难以通过对流散出;长期高温工况会加速内部润滑脂失效,摩擦阻尼持续衰减,进一步降低断电保位的外力耐受极限。
2.8 目前散热解决方案
采用全结构被动均热降温思路:掌心支撑结构、连杆结构采用高导热铝合金材质,以整机结构件作为均热载体,提升整体导热与辐射散热能力;关节内部填充长效耐温润滑介质,从源头降低摩擦产热水平,同时延缓阻尼衰减速度。大扭矩功率解热能力有限,作者想上液冷,听到的都是否定,没有难度多没意思,我觉得可行。
2.9 技术优缺点
优点:传动刚性高、末端重复定位稳定性好;轻载断电可依靠摩擦阻尼自主保位,无发热;控制逻辑简洁、结构故障率低、故障可追溯性强。
缺点:手指结构臃肿,仿生自由度受限;完全无反驱柔顺性,不适配柔性人机交互;仅依靠被动散热,连续满载工作热容量有限;断电保位存在外力上限,重载场景无法脱离电机通电维持力矩。
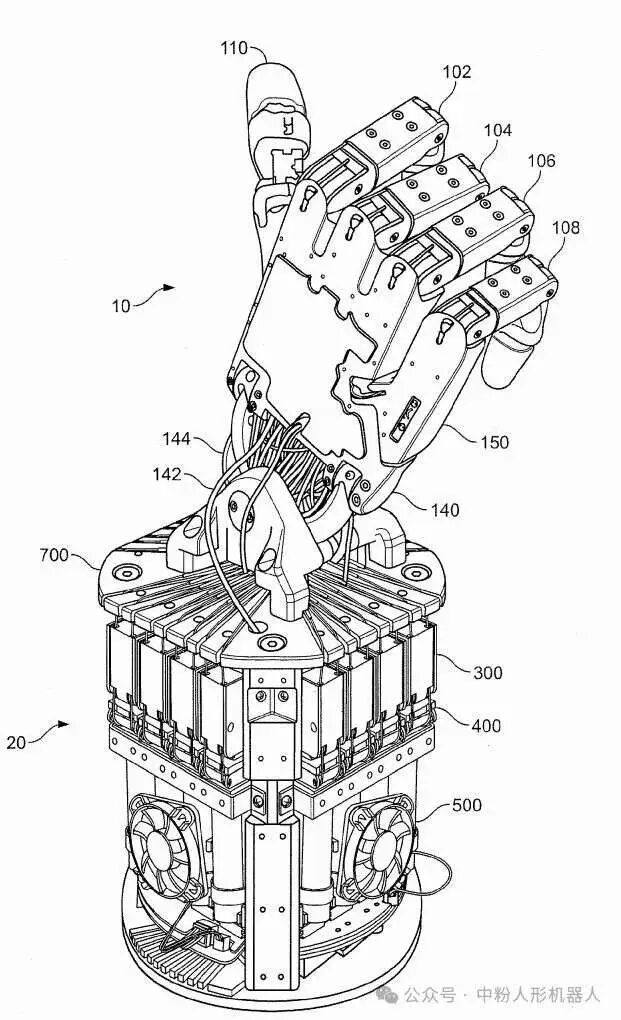
3 齿轮准直驱(关节集成直驱)


3.1 动力链路、动力转化、核心构件
动力链路:指节内置空心杯电机 → 微型低背隙减速器 → 关节输出端(一体化集成)
动力转化形式:电机旋转机械能直接就近输出,短链路降速增扭驱动关节摆动
核心传动构件:空心杯微电机、微型行星/谐波减速模组、集成编码器、板载驱动电路
3.2 工作原理与结构布局
极致精简传动链路,采用单关节集成架构:指节内部集成空心杯电机、微型减速模组、编码器、驱动采样电路,驱动、传感、电控单元与关节一体化整合,实现关节就近直驱,传动链路径最短。
3.3 反驱特性 & 人机刚度特性
低背隙微型减速架构,传动反向阻尼小、阻力均匀稳定。
外部作用力可平稳推动关节回转,外力反馈线性度好、无明显卡顿与死区。
人机刚度适中可控,支持力控柔顺交互、遥操作跟随、被动自适应接触。
3.4 锁止能力与自锁原理 & 保力发热
- 锁止形式:弱机械阻尼+有源电流闭环混合保位
- 锁止机理:减速器固有微小反向阻尼提供基础限位效果,高精度姿态保持、负载夹持完全依赖电机电流闭环力矩维持
- 断电特性:无源自锁能力弱,在自重或轻微外载下即可发生姿态偏移,断电无法保位
- 保力热特性:持续夹持工况需要电机长期通电锁止,关节狭小空间内持续累积电控焦耳热,静态保力发热问题突出
3.5 核心控制难点
单关节独立闭环控制算力需求高;狭小空间内多传感器集成标定难度大;关节往复形变叠加温度漂移效应,力矩误差、位置误差的实时补偿算法复杂度高。
3.6 产热机理
为五类传动中热源耦合最复杂的架构,存在三重叠加产热:
1. 电机本体:工作铜损、铁损产生的基础损耗热
2. 传动端:微型齿轮啮合、回转摩擦产生的机械损耗热
3. 电控端:内置驱动板功率器件开关损耗热
4. 热源分布特征:多节点分布式发热,每段指节均含独立热源,发热腔体空间狭小、热堆积条件强
3.7 散热痛点
指节内部空间极小,无法搭载风扇、热管等主动散热器件;外层仿生包覆结构密闭,无自然对流换热通道;关节持续弯折运动,固定式刚性导热结构无法适配形变需求;温升会直接诱发编码器温漂、电机力矩输出衰减、密封结构可靠性下降等连锁问题。
3.8 标准化散热解决方案
1. 柔性导热填充:关节内部填充形变适配型导热介质,消除结构间隙热阻,提升内部均热能力
2. 壳体均热散热:手指薄壁外壳采用高导热材质,依托外表面实现被动辐射与自然对流散热
3. 算法热保护:增设温度闭环逻辑,高温区间动态限制工作电流,抑制热失控与过热失效
4.大扭矩功率解热能力有限,作者想上液冷,听到的都是否定,没有难度多没意思,我觉得可行。
3.9 技术优缺点
优点:传动链最短、动态响应快、末端力控精度高、反驱柔顺性优异,适配高精度精细操作、触觉交互、示教复刻场景。
缺点:结构集成难度大、硬件成本高;指尖密闭狭小空间存在固有散热瓶颈,无强机械自锁能力,持续保力必然伴随高热堆积,长时间满载工作工况受限。
4 微型丝杠电缸传动

4.1 动力链路、动力转化、核心构件
动力链路:驱动电机 → 减速结构 → 梯形丝杠副 → 直线推杆 → 指尖转接连杆 → 指节关节
动力转化形式:电机旋转运动 → 丝杠螺旋传动 → 直线推拉位移 → 铰接摆动驱动手指屈伸
核心传动构件:驱动电机、梯形丝杠、传动螺母、密闭缸筒、直线推杆、转接铰接件
4.2 工作原理与结构布局
依托电机旋转输入,通过丝杠-螺母副将回转运动转化为直线推拉运动,以模块化微型电动推杆驱动指节屈伸;传动链路刚性固定,运动传递确定性高、推力输出稳定性强。
4.3 反驱特性 & 人机刚度特性
梯形丝杠结构固有反向阻力大,传动链不可逆特性显著。
外部冲击负载、外力推拉无法反向驱动丝杠回转,关节无被动形变、无缓冲余量。
人机接触刚度极高,完全无柔顺交互特性,仅适配刚性定位、稳态夹持场景。
4.4 锁止能力与自锁原理 & 保力发热
- 锁止形式:纯机械摩擦角原理级无源自锁(全场唯一真自锁结构)
- 锁止机理:小导程梯形丝杠满足「导程角<当量摩擦角」机械不可逆条件,负载反向力矩无法克服螺纹摩擦阻力,实现传动原理级永久自锁
- 断电特性:断电后机械自锁依然有效,姿态无滑移、无松动、无漂移,长期保位稳定性好,无任何外力阈值限制
- 保力热特性:依靠机械结构自持夹持,静态保力无需通电、无电控损耗,零功耗、零发热
4.5 核心控制难点
传动不可逆导致被动力反馈特性差,外力扰动下的高精度力控难度大;动态运动、静态保力两种工况损耗差异大、产热特性不一致;丝杠长期磨损会持续改变传动阻尼,需要长期位置误差标定与补偿。
4.6 产热机理
1. 主热源:丝杠螺母副相对滑动产生的高强度机械摩擦热
2. 次热源:传统堵转保力工况下的电机通电焦耳热(可通过控制策略完全消除)
3. 热源分布特征:热量集中于掌心密封电缸模组内部,结构封闭、热量易聚集
4.7 散热痛点
丝杠滑动摩擦损耗占比高,整机能量转化效率偏低,多余能量以热量形式累积;一体化密封模组无对流散热通道;传统堵转保力模式会引发极速积热,静态工况温升问题显著。
4.8 标准化散热解决方案
1. 辐射散热强化:电缸外壳采用高辐射系数表面处理,提升红外被动散热能力
2. 源头减热优化:丝杠摩擦副采用减摩耐磨涂层,降低基础摩擦产热水平
3. 控制策略优化:取消堵转保力逻辑,静态夹持完全依托机械自锁,彻底消除堵转发热源
4.9 技术优缺点
优点:输出推力稳定、刚性定位精度高、模块化集成度高、无源自锁可靠、超长时静态保力无发热、批量量产一致性好。
缺点:传动响应速度偏慢、完全无反驱柔顺性;动态运动工况摩擦产热大,不适配高速动态操作、柔性人机交互场景。
5 钛基金属相变驱动(镍钛SMA形状记忆合金驱动)
5.1 动力链路、动力转化、核心构件
动力链路:供电电路 → 镍钛合金丝 → 热致形变直接驱动关节
动力转化形式:电能 → 焦耳热能 → 金属马氏体相变形变 → 机械屈伸位移(无中间机械传动)
核心传动构件:镍钛记忆合金丝、绝缘固定基座、温控驱动电路、复位预紧结构
5.2 工作原理与结构布局
无电机、无减速器、无刚性传动结构,核心驱动依靠镍钛合金热致形状记忆相变效应。通过对合金丝通电加热产生焦耳热,触发马氏体相变产生收缩形变,驱动手指弯曲做功;断电降温后合金恢复原始形态,实现关节复位,主流架构采用双丝对拉结构实现双向驱动。
5.3 反驱特性 & 人机刚度特性
具备温度关联的时变柔顺与反驱特性:
- 低温冷却状态:合金处于松弛状态,结构无刚性约束,可完全被动反驱,碰撞柔顺性好、人机刚度低
- 高温相变工作状态:合金硬化收缩、形态固定,无法被动反驱,人机接触刚度显著提升
为本五类方案中唯一刚度、柔顺性可随工作状态动态切换的驱动架构。
5.4 锁止能力与自锁原理 & 保力发热
- 锁止形式:有源热场形变锁止,无任何机械自锁结构
- 锁止机理:持续通电维持相变工作温度,稳定合金收缩形变量,实现关节姿态保持
- 断电特性:断电降温后相变效应消失,锁止效果完全失效,关节自动松弛复位
- 保力热特性:姿态夹持必须持续通电加热,保力过程全程伴随稳定焦耳产热
5.5 核心控制难点
合金相变有效温度区间窄,微小温度波动即可引发输出力、形变量偏移;环境温度对输出特性干扰显著;长期冷热交变循环产生疲劳偏移,位置、力值闭环补偿难度高于纯机械传动方案。
5.6 产热机理
产热逻辑与机械传动完全不同:热量为驱动能量输入源,而非传动副产物。
整机唯一热源为记忆合金丝通电焦耳热,依靠精准温升触发相变做功,无齿轮、丝杠、绳索类机械摩擦次生热源。
5.7 散热独有技术矛盾
其余四类传动的散热仅用于降温保护、抑制热失效;SMA驱动存在驱动加热与复位散热的原生技术悖论:
1. 升温增益矛盾:快速升温可提升收缩力与响应速度,但高温会诱发表层传感器温漂,存在表面高温接触风险
2. 散热增益矛盾:快速散热可提升复位速度与动作频率,但过度散热会损耗驱动热能,导致相变不充分、输出力衰减
3. 疲劳失效矛盾:高频冷热交变循环会诱发合金内部微损伤,产生记忆形态偏移,加速驱动性能衰减
5.8 标准化散热与温控解决方案
1. 被动微孔对流:壳体开设微型透气结构,依靠自然风冷实现平稳降温,结构简单可靠,动作频率受限
2. 主动强制风冷:集成微型风道与静音送风结构,加速降温复位、提升动作频次,会小幅增加整机体积与噪音
3. 冷热解耦精准温控:通过微流道换热、半导体制冷等分区温控方案,实现驱动加热区与复位散热区解耦,精准控温消除热悖论,现阶段多处于实验室验证阶段
5.9 技术优缺点
优点:无传动间隙、无机械运动噪音、手指极致轻薄仿生;低温松弛状态人机柔顺交互性优异;整机结构极简、集成度极高。
缺点:动作频率受散热条件硬约束;输出负载能力有限;无机械自锁结构,保力全程产热;环境温度适应性弱,不适合重载、高频连续作业工况。
6 五大传动方案标准化技术维度对比
1. 齿轮准直驱:左上区间,动态运动性能最优,整机工程成本、热设计难度最高;指尖分布式热源散热瓶颈突出;高柔顺、无机械自锁、保力持续发热
2. SMA钛合金相变驱动:中上区间,轻量化、仿生外观性能突出;热控逻辑矛盾性最强、量产落地成本高;柔顺刚度时变、无源自锁、驱动全程产热
3. 绳驱传动:中上区间,轻量化与柔顺交互性能优异;调试标定工作量大;整机散热条件最优、温度漂移影响低;极致柔顺、无机械自锁、指尖零热源
4. 微型丝杠电缸:居中区间,性能均衡、量产稳定性优异;集中热源散热可控,静态保力热特性最优;完全刚性、全场最强机械自锁、零热保力、无柔顺反驱
5. 连杆刚性传动:右下区间,结构成本、量产难度最低;内部散热空间受限,连续工作摩擦积热问题明显;仅轻载断电摩擦保位、重载需通电、无被动柔顺性
结尾
现在灵巧手功能实现固然重要,也有很大的突破百花齐放,但是应用场景和负载没说清楚,无论空心杯还是无框力矩都在看峰值扭矩,作者认为需要先确认比如半个小时,十五分钟,十分钟到十秒五秒对应的热限制可以达到的能力,然后再去针对性做散热。
尽管否定无数,作者仍然认为液冷也可行,仿生的角度灵巧手是否也需要血管和汗腺,期待您的思路,批评,建议和讨论,集思广益一下,万一成了呢
来源:Baum 陈大树
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
