
本文基于 Scott Walter 等 的公开视频进行学习复盘,仅供学习交流参考。如需查看原视频,请移步至视频号。亦可加入知识星球阅读更多资料(方式见文末)。
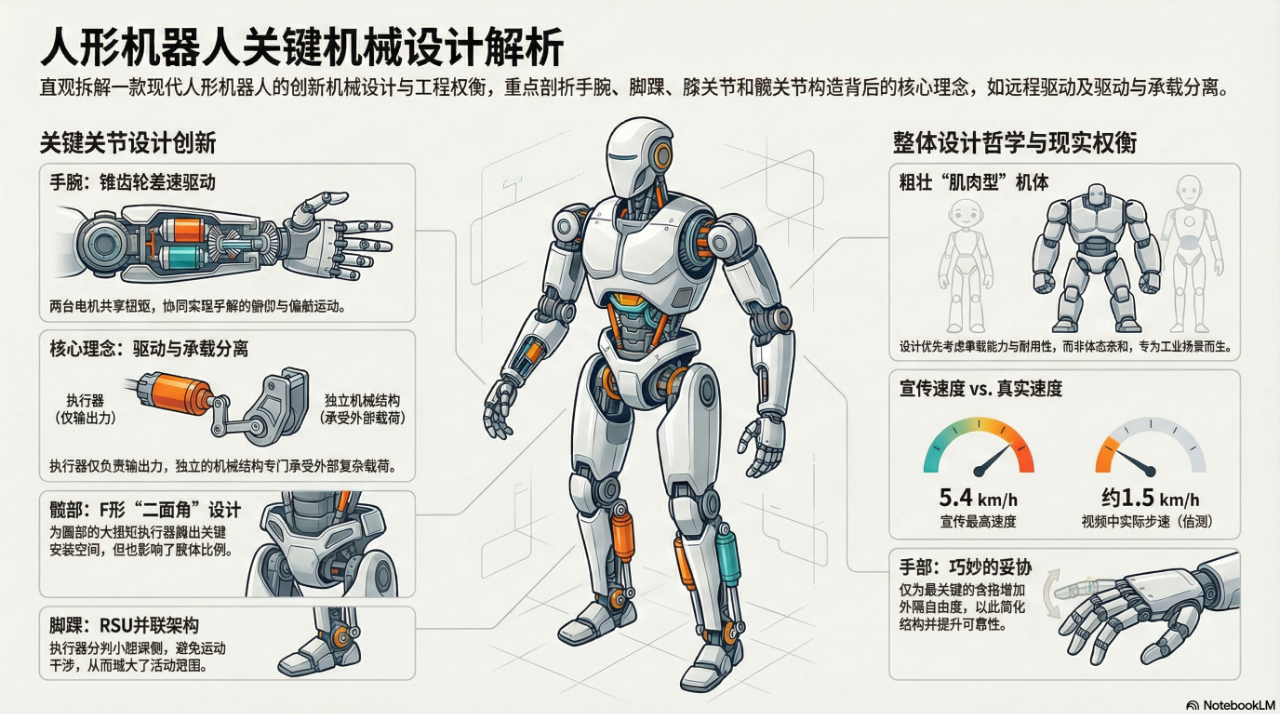
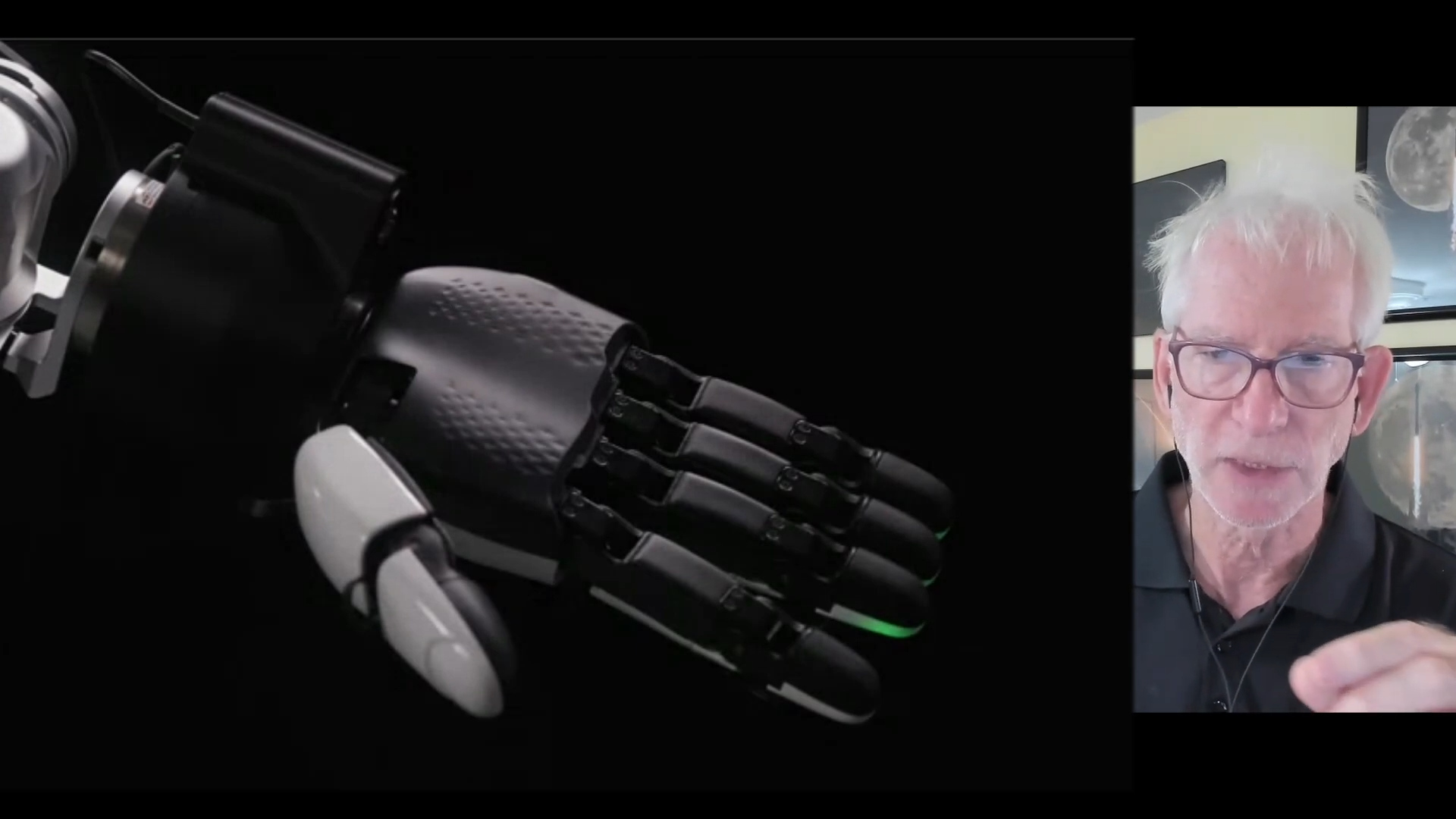
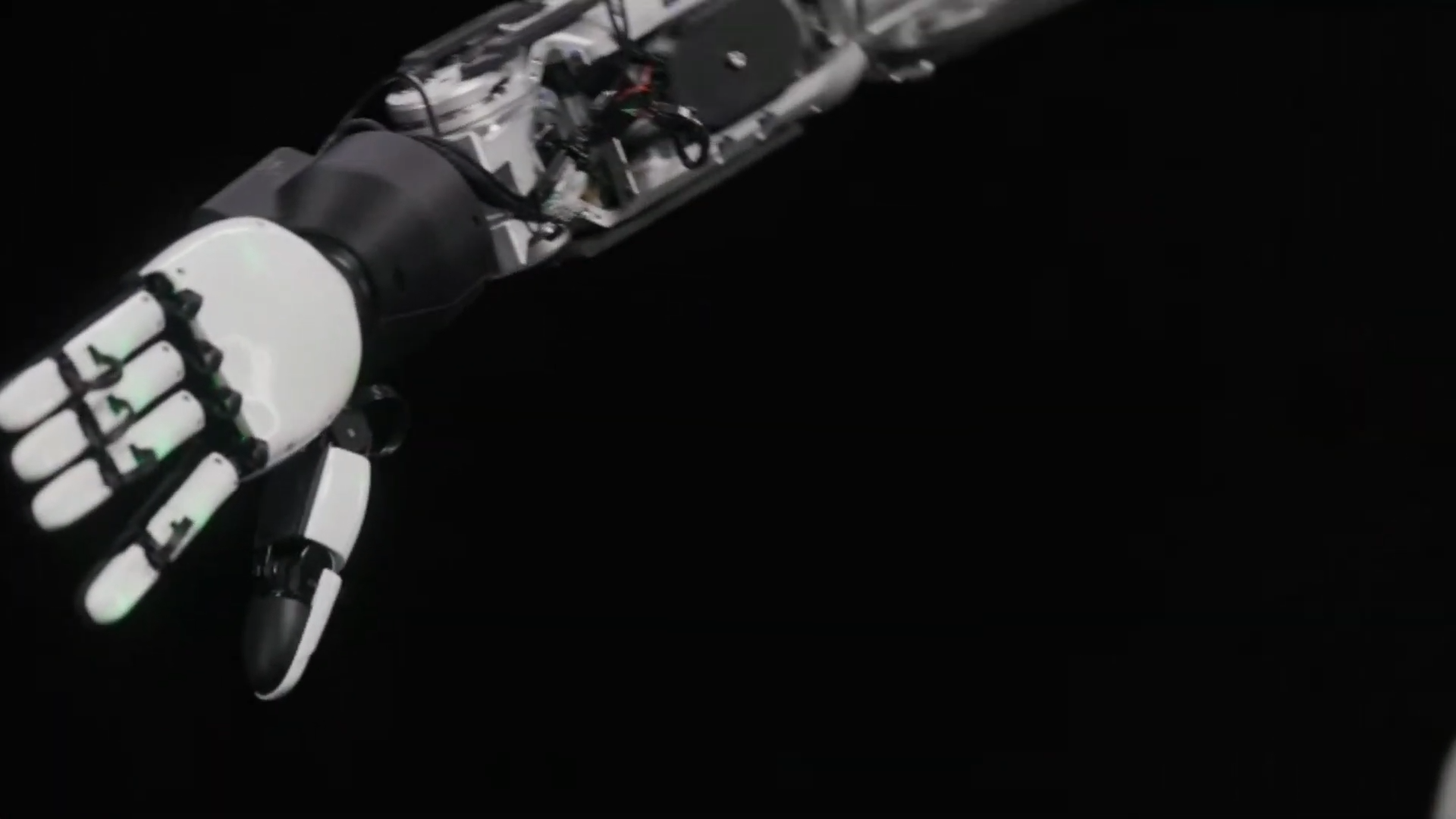
在手指部分,三个手指保持相互平行,只有食指具备外展(abduction)自由度,也就是说,只有食指有外展 DOF,其余手指只负责屈伸。这一点和宇树 H2 等方案类似,但这里的外展执行机构封装得更紧凑,在同类功能下体积控制得更好。
脚踝采用的是RSU(Revolute–Spherical–Universal)并联驱动架构,属于当前并联脚踝两条主流路线中的旋转执行器方案(另一条是 Optimus 使用的 SPU + 线性执行器)。
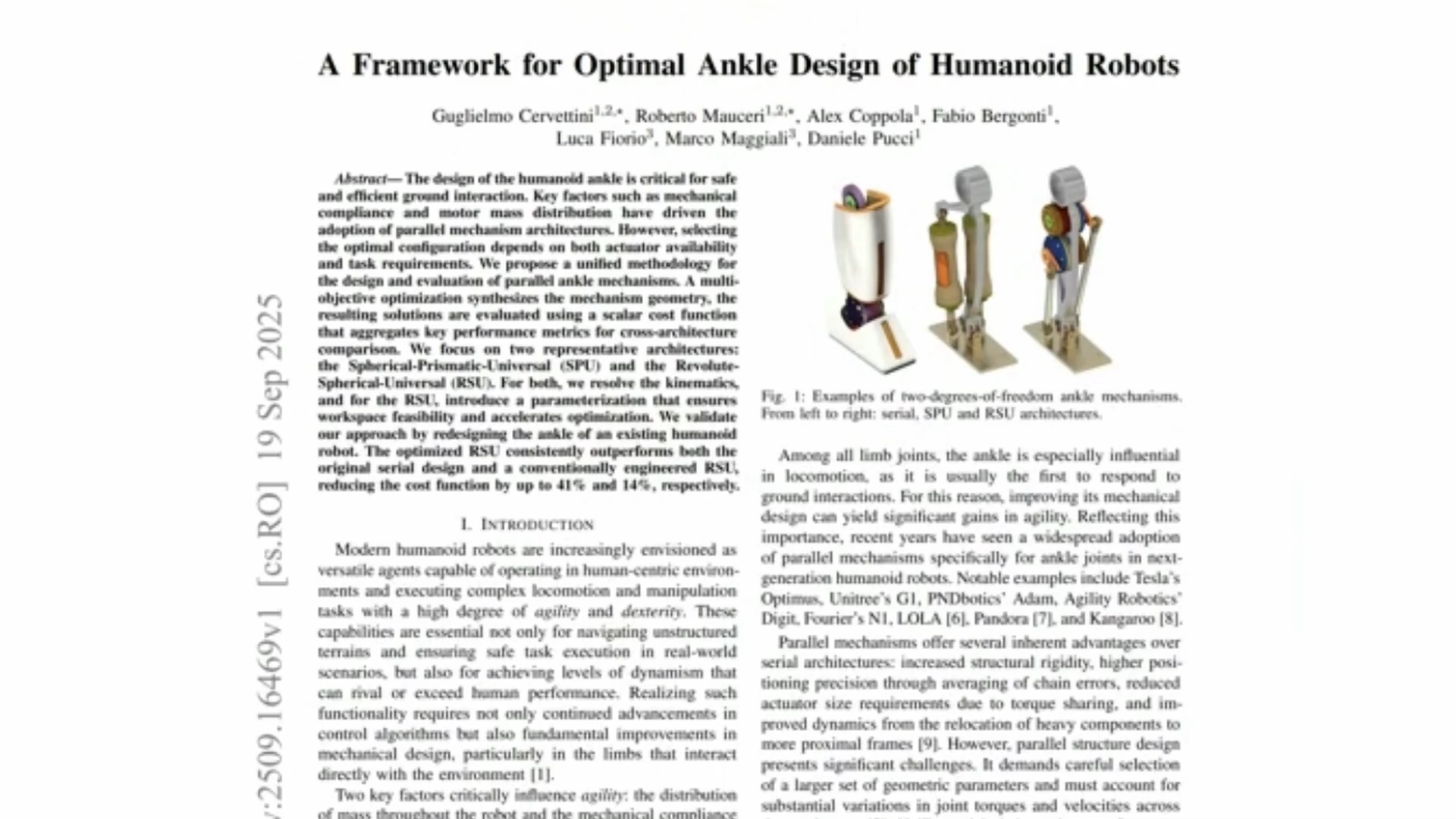
在这个设计中,执行器按照“教科书式”RSU 实现被朝两侧布置,两根拉杆分列小腿两侧,因此在脚踝做大幅俯仰时,拉杆之间不会发生干涉。

相比之下,一些现有机器人(例如宇树 H2)将执行器朝前或朝后布置,两根拉杆全部挤在同一侧,在大角度俯仰时容易互相打架、限制运动范围。
Humanoid 的方案是一根内侧、一根外侧,一高一低

实际侧向轮廓并未明显变宽,仍然可以塞进下肢的整体轮廓,在活动范围与封装紧凑性之间取得了更好的平衡。
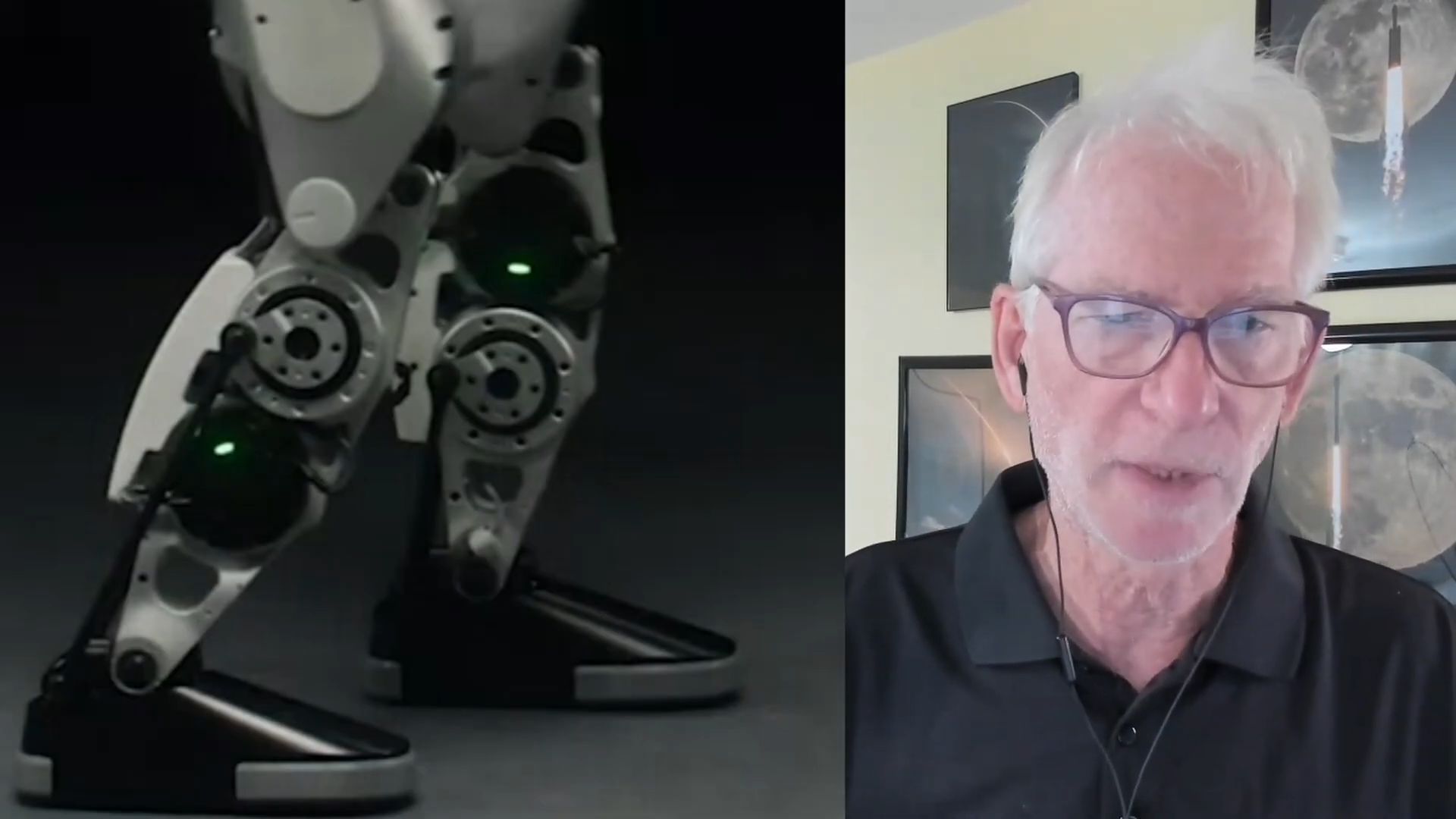
脚底部分则没有可动趾关节(articulated toe / toe joint)。在当前产品中,这并不罕见,但如果目标是更高的行走速度和更接近人类的步态,趾关节会非常关键。在低速“拖步”状态下,没有趾关节问题不大;但一旦希望真正“跑起来”,就需要通过脚趾的滚动与推进来改善离地与着地的姿态。
从正视图看,这台机器人下肢和足部显得非常粗壮,块头很大,整体观感更像是一个为工厂场景设计的工业用人形机器人,而不是面向家庭的服务型机器人。这种“肌肉型”比例,很大程度上反映了它在结构取舍上更偏向承载能力与耐用性,而不是体态上的亲和与纤细。
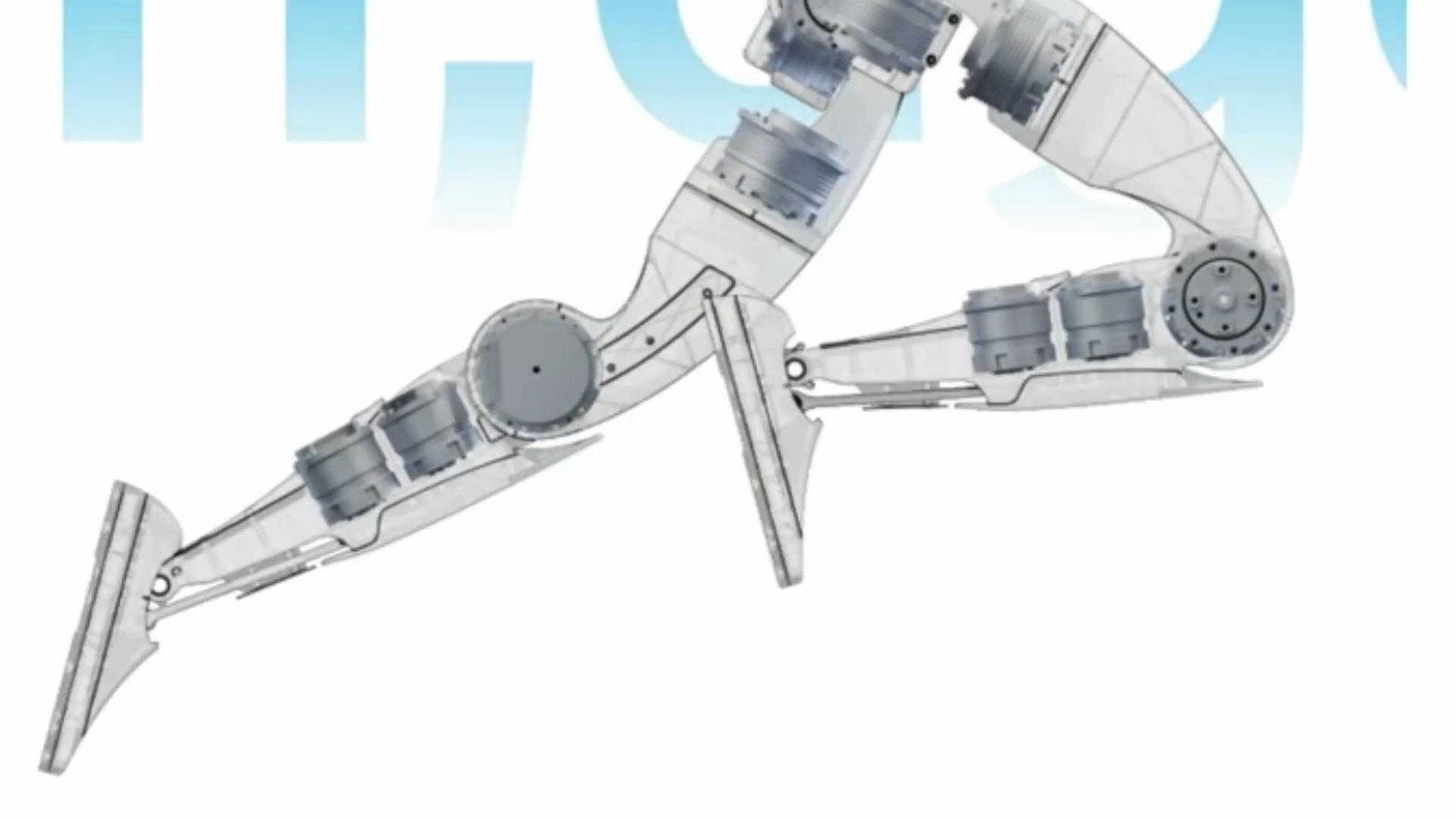
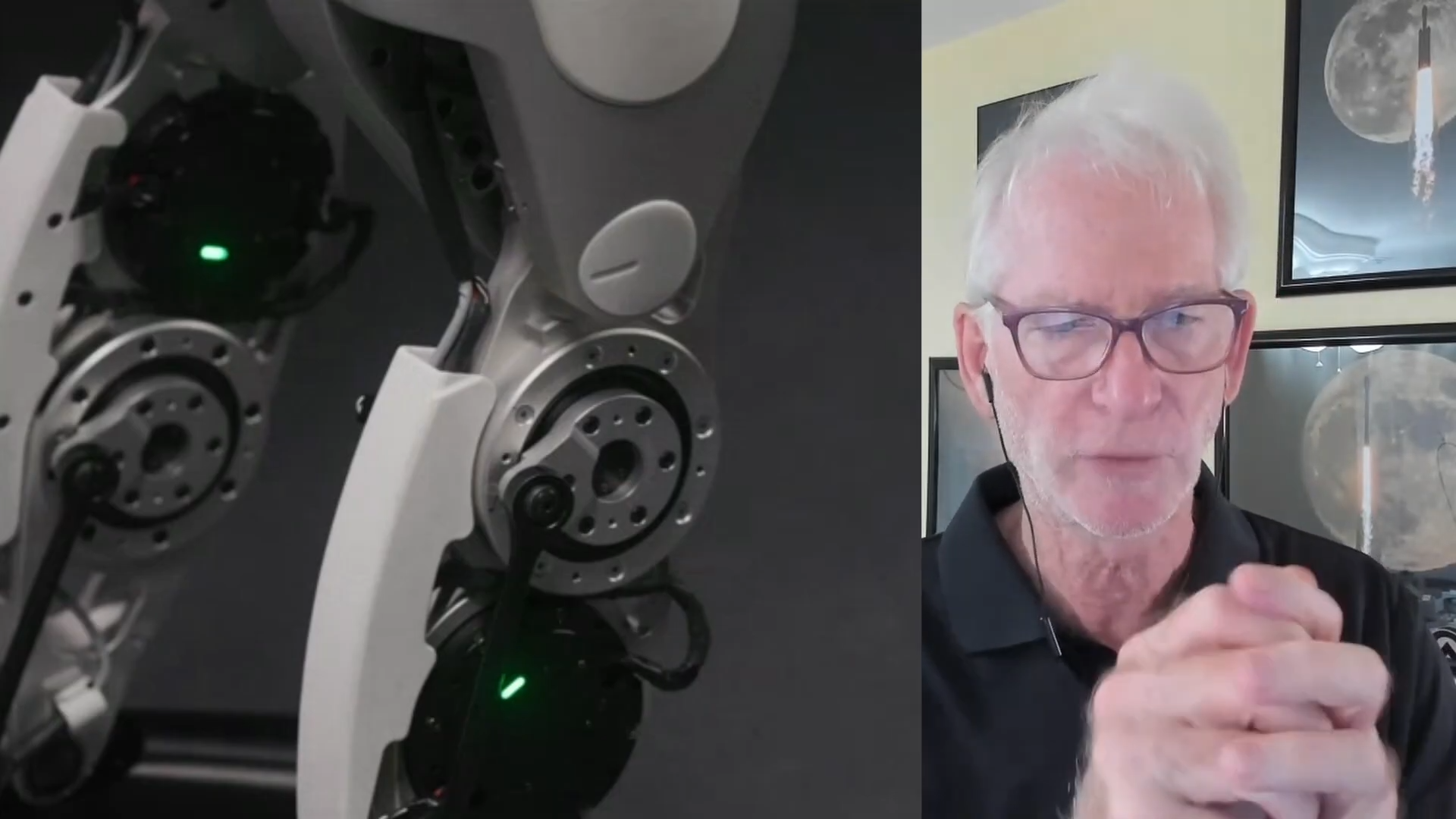
远程驱动膝关节:大号 pancake 执行器 + 载荷铰链分工
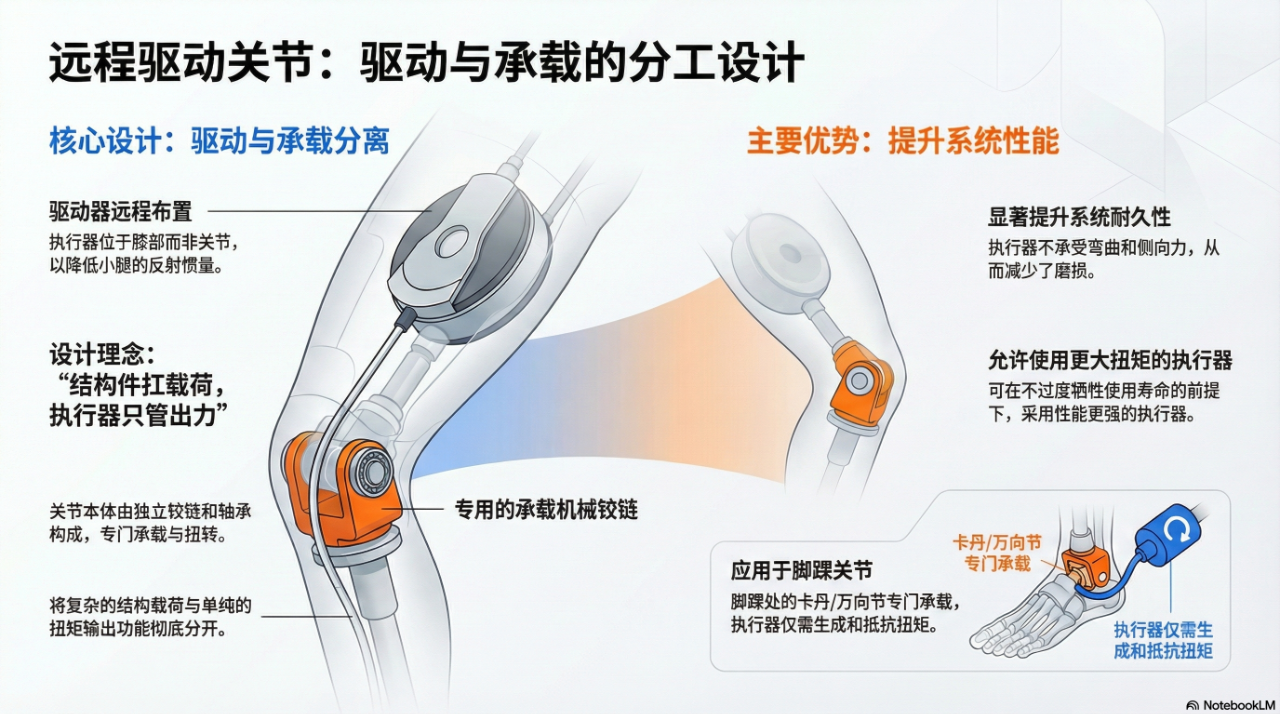
膝关节采用了远程驱动方案:膝关节本体并不是集成执行器的关节模组,而是一组独立的机械铰链和轴承结构;真正的驱动执行器被放在膝部上方,是一个体积很大、接近“煎饼形”的大直径盘式执行器(pancake actuator),并且相对小腿中心线偏向内侧布置,以便为下行连杆预留合理的几何位置。这种布局一方面可以把执行器“提上去”一些,降低对小腿的反射惯量,另一方面更重要的是让膝关节本身可以做成专门承载载荷与扭转的机械铰链:前侧是驱动拉杆,膝轴内部可以布置高质量的轴承和承载结构,执行器只负责输出扭矩,而不直接承担全部结构载荷和复杂扭转。
同样的思路也体现在脚踝的 RSU 架构上:脚踝处的卡丹/万向关节专门用来承受轴外载荷和扭转载荷,而执行器那一侧只需要生成并抵抗扭矩,尽量不去承受弯曲和侧向力。通过这种“结构件扛载荷,执行器只管出力”的分工,可以显著提升系统的耐久性,并允许使用更大扭矩的执行器而不过度牺牲使用寿命。
髋关节二面角:宽胯、稳定性与奇异位姿的博弈
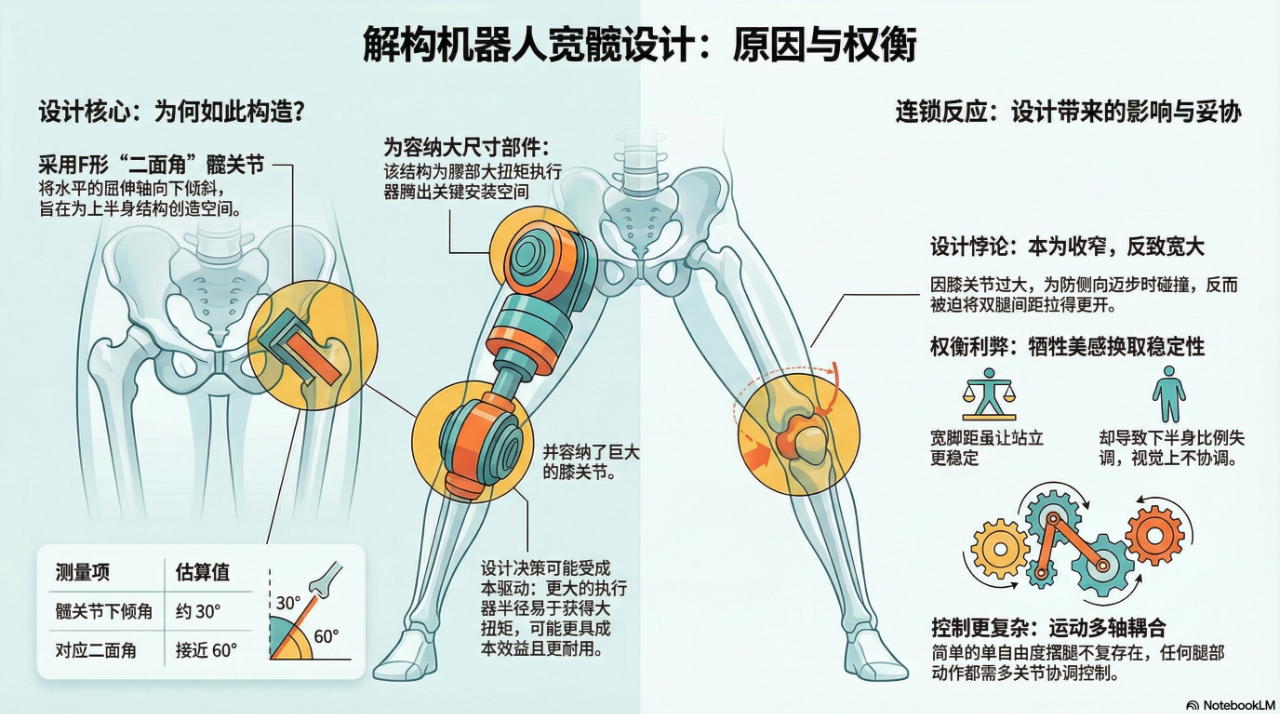
髋关节采用了明显的二面角(dihedral angle)设计:将原本水平的屈伸轴略微“压”下来,形成类似 F 形髋结构,这种设计在 Boston Dynamics、宇树 H2、Engine AI T800 等机型上也都能看到影子。其作用包括:让双腿可以更靠近、减小髋宽,改善行走时的力学姿态与稳定性,并在髋部上方“挖出”一块结构空间。在腰部,这台机器人似乎只配置了一个单轴腰关节(竖直偏航轴),为了提供足够的扭矩,需要在腰部塞入一个较大扭矩的单轴执行器。髋关节的二面角几何,恰好为这个腰部执行器和上躯干结构腾出了必要的安装空间,这也是整个上半身封装逻辑中的关键一环。
在理论上,这样的设计本来是为了让两条腿靠得更近。但你看这个机器人,现在髋部之间还是留着一大块明显的间隙(hip gap),而且这个间隙非常大。
很大一部分原因,是因为膝关节本身做得太大太臃肿。
回去看视频你会注意到,当机器人开始做侧向迈步(side stepping)的时候,两侧膝盖几乎要互相碰到。我一开始以为:“哦,那他们其实不需要预留这么大的空间吧。”但后来意识到:正是因为膝关节太粗,为了侧向迈步不互撞,就被迫把髋部拉得很开。
所以我一直在来回纠结:到底是膝关节的设计驱动了髋部宽度,还是一开始髋部就因为整机布置被设计得很宽,正好顺带“包容”了这么大的膝关?我没法确定是哪个先哪个后,但我更倾向于:膝关节的大体积反过来逼出了髋部需要一定的偏置和宽度。对比一下髋宽和肩宽的比例,会发现整体比例看着有点不对劲——肩膀看起来好像太窄了。我认为这其实是一种视觉错觉:上半身的尺寸大概还在正常的人形范围,只是下半身做得太宽太鼓,拉坏了整体比例。
我知道 Unitree H2 也用了类似的思路,但在执行器尺寸和封装上明显要小很多。所以一个自然的问题是:为什么不把执行器放在腿的外侧(outboard),而要放在内侧(inboard)?如果把这些驱动单元都布置到大腿外侧,就可以进一步把两条腿收得更近。通常来说,带二面角(dihedral angle)的髋关节设计,本意就是为了把腿往中线方向收。很多早期人形机器人双腿之间的间距太大,后来大家才开始通过几何设计去“折”出一个角度,让两条腿更靠近。所以现在这种情况有点讽刺:用了带二面角的远侧髋形式,却仍然做出一个很宽的下半身。
唯一勉强能替他们解释的一点是:如果你把执行器都挂在腿外侧,就有点像穿带巨大侧兜的工装 / safari 裤。当你把侧兜塞满东西,实际“腿宽”会突然变大,走路就会老是撞到周围。从这个角度看,设计师可能不想让机器人在环境里到处“刮蹭”。另一方面,更宽的脚间距(foot spacing)会让站立和平衡略微更稳定,这也可能是他们在多种约束下,最后接受这套设计的原因之一:既然这块空间无可避免要这么大,那干脆在这里塞下大号执行器,同时换一点稳定性。
接下来再看这个带二面角的髋关几何本身。通常这种结构里,会有一个从上往下倾斜的柔性/弯折构件(flexure),它的轴线并不和主转轴完全同轴。也就是说,三个转动轴并不是严格同心的,而是存在轻微偏置。这已经成了各家人形里的“主流做法”之一——大家都在这么做。然后你会注意到那个旋转执行器(rotary actuator):第一眼看上去就会觉得,这个旋转关节的执行器大得离谱。按理说,它所在的自由度并不需要太大扭矩,因为它并不直接对抗重力,只是在做往复的旋转运动。这就让人怀疑:是不是膝盖里那颗超大的“pancake”式执行器撑大了整块体积,从而被迫把这一段的壳体和关联部件全都做大。
也不能排除这样的情况:里面真正的电机和减速器其实并没有那么大,只是整个外壳和叉架(yoke)不得不被做成一个很大的“鼓包”。再加上他们的外展执行器(abductor)本身也不小,于是你就看到一个整体非常“粗壮”的髋关总成:外展很大、膝很大,至于其他关节到底是不是也塞了大执行器,还很难说。从工程上看,越是把东西做小,要保证高可靠性就越难,成本也更高;而更大的半径更容易获得大的输出扭矩。所以他们可能会想:“反正这块体积无论如何都要预留,不如干脆塞一个更大一点的执行器,又省成本、又更耐用。” 只是在目前公开画面里,这个关节确实比我在别的人形上看到的同类关节都要大一圈。
关于髋部的二面角具体是多少,从截图上量有很大误差,但我估计:这个“下倾角”大概在 30° 左右,对应的几何关系是髋部的二面角接近 60°,
并不是一个严格的 45° 或其他“好记”的整数角度。工程师脑子里总喜欢30/60/45/90 这种“漂亮角度”,但物理上其实没什么神奇之处。30° 之所以特殊,也就是sin 30° = 1/2,计算方便而已;从物理或运动性能角度看,30° 和 33° 不会有本质的“魔法”差异。
不过,把髋关节做成这样,对步态(gait)肯定是有影响的。当你只想做纯屈伸(pure flexion,也就是腿在矢状面前后摆动)时,因为轴线是交错的,外展/内收那一侧的执行器也不得不参与工作。换句话说:你再也得不到一个完全“干净”的单自由度摆腿运动,控制上一定是多自由度耦合解算。好处是:某些扭矩需求可以在不同自由度之间分摊,可能略微减轻个别关节的峰值扭矩和反射惯量;坏处则是:如果不通过控制补偿,膝盖前摆时会往外偏,后摆时会往内收,形成一种“奇怪的摆动轨迹”。但对于现代控制系统来说,这些都不是致命问题,控制器只要把几何耦合建模好,通过多关节协调控制就能搞定,数学复杂一点而已。
从其它视角看过去,你可以更清晰地看到:外展执行器本身体积很大,整个髋关壳体也显得非常粗壮,整体感觉就是:“这一块确实被做成了一个很大的总成。”
手腕远程驱动:差速结构 + 双连杆扭矩共享
然后,话题就切换到了他真正感兴趣的部分——手腕的机构设计。在一张并不算很清晰的截图里,你可以在机器人的右手(画面左边)看到一个电机和几根连杆,另一侧则是基本对称的结构。
一开始我以为:这只不过是一个腕关节的俯仰(wrist pitch)机构,而偏航(yaw)自由度是藏在手腕内部其它地方的。当时也不明白他们为什么要用这种偏置的结构来实现,看上去好像有点“大材小用”。
但随着反复看视频,事情变得清晰了一点:在画面右上角,你可以在手腕底部看到一个倒扣的银色“杯状”零件。这个倒扣杯状结构是理解整套腕关机制的关键。

放大之后你会发现:两侧都有一个圆柱形区域,在其中一侧你可以看到上下各有一根黑色连杆连接进去,另一侧也有同样的布局。手掌则通过下面一个分叉状(fork)的结构连接在这套机构下面,并绕着它转动。
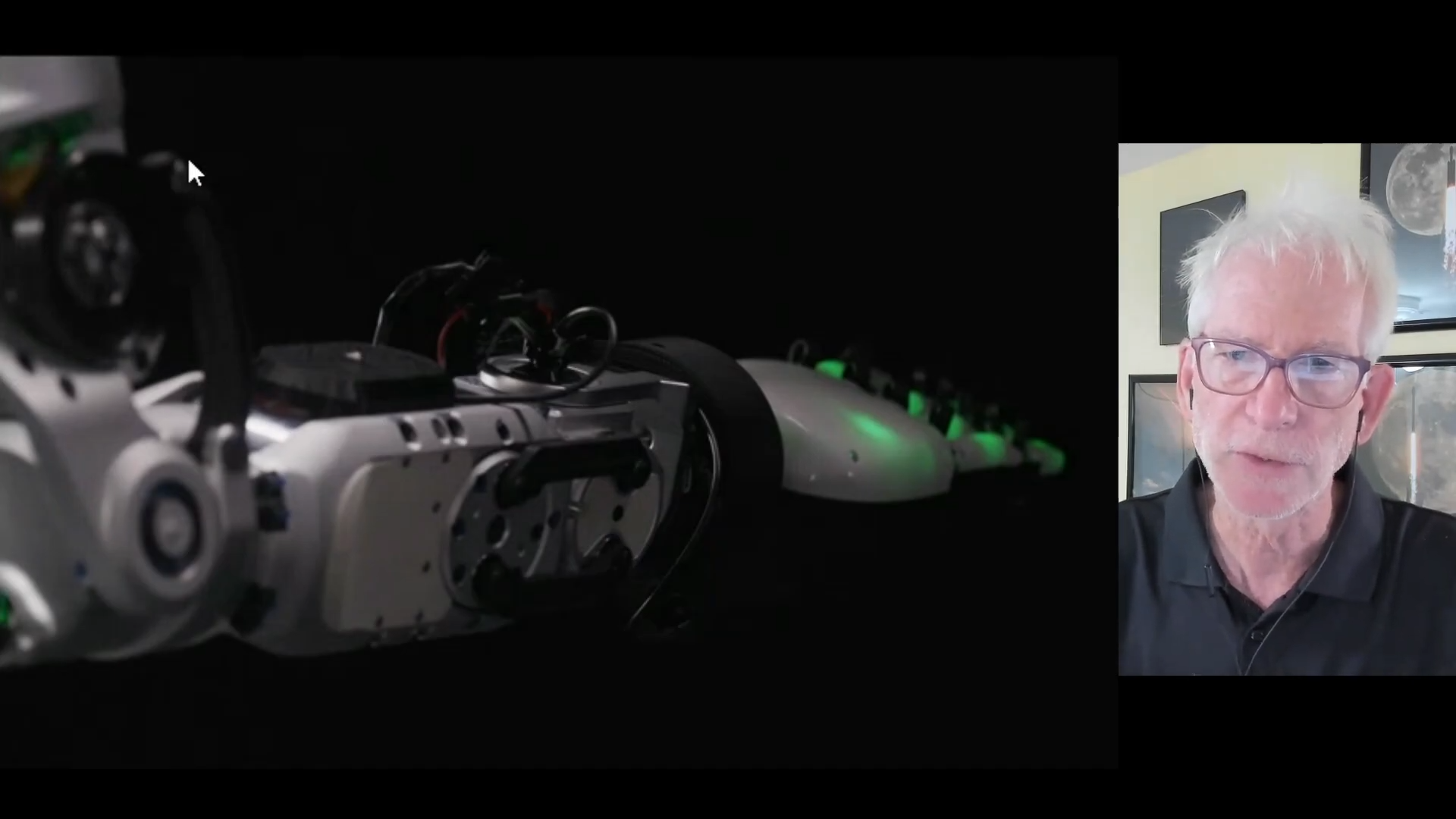
我一开始以为:这个倒扣的银色杯子里装的是一个执行器,因为它看起来又大又不像普通关节壳。但越看越像是:它其实并不是驱动本体,而是这套手腕差动/联动机构的一部分,用来把两侧执行器的运动综合传递给手掌,形成特定的俯仰 + 偏航组合动作。
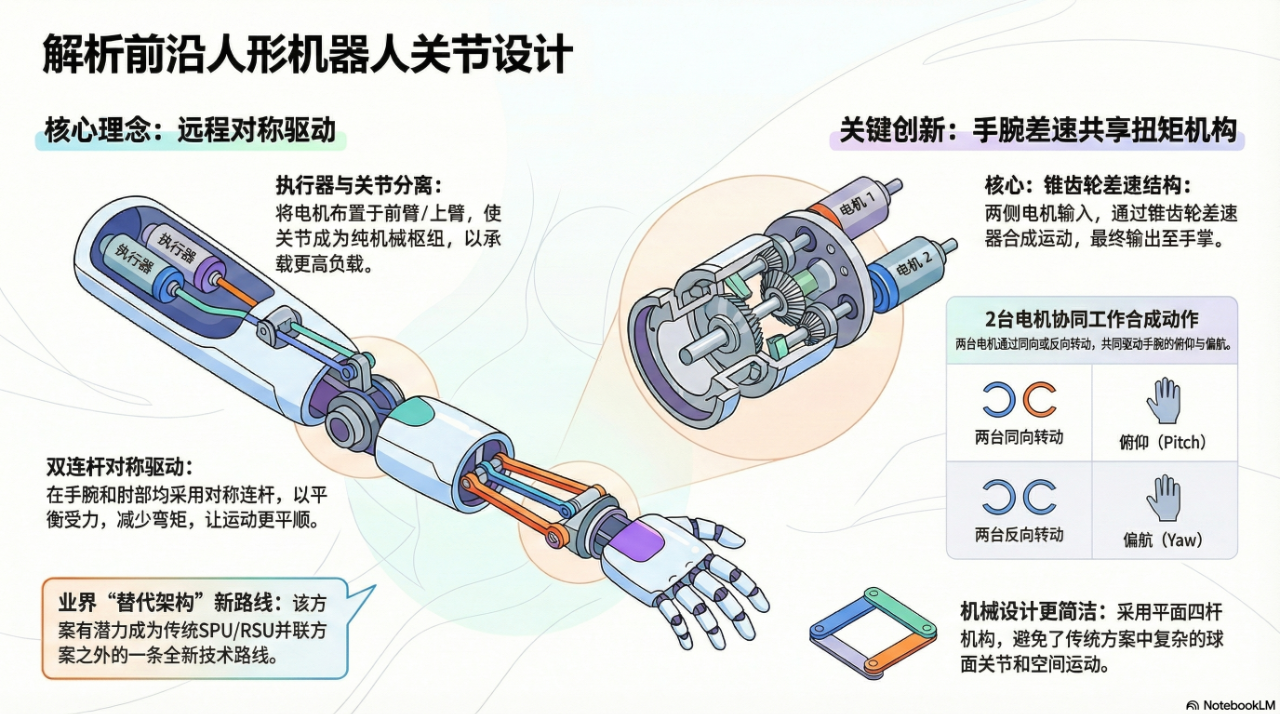
一开始看到这个结构的时候,很容易直觉地以为:“哦,这里肯定塞了一套执行器(电机+减速器)。” 如果你像我一开始那样想,其实是错的。现在已经可以看得很清楚:我们在这一侧看到的这套机构,在另一侧是对称复制的,这说明这里其实是一个输入关节/输入轴结构。两侧各有一个输入轴进来,再在中间合成——它内部很大概率是一个锥齿轮差速结构:左右两侧各有一只锥齿轮输入,然后再有一只锥齿轮垂直向下输出。
在这种布置下,两台电机同向转动,就得到手腕的俯仰(pitch);两台电机反向转动,就得到另一自由度(偏航或滚转一类的转动)。关键点在于:不管是做俯仰还是做偏航,这两个电机都必须一起工作,不能固定其中一个不动。 我起初以为他们是“一套俯仰执行器 + 一套偏航执行器”的传统做法,现在可以确定:他们不是做两个独立关节,而是做了一套差速式、双电机扭矩共享的二自由度机构。
这套方案放在行业背景里看就更有意思。过去我们看到的主流做法,是在手腕采用类似 RSU / SPU 的并联架构,其中 SPU(Spherical–Prismatic–Universal)更接近 Optimus 的手腕方案:线性执行器布置在上游,通过类似 Cardan 万向节 的结构,把力和扭矩并联传递到手腕输出。这种做法有两个核心优点:一是手腕可以做得非常细长(slender),横截面小;二是更容易让两个旋转轴线在空间上尽量共点/同心,而不是前后错开。如果你尝试用传统串联关节去堆,既要塞下足够大的扭矩,又要把各轴线对得非常准,几乎是工程噩梦,因此大多数团队会选择远程驱动(remote actuation)+细长并联手腕这条路。
而现在这家团队的做法,相当于往前走了一步:他们通过差速结构让两个电机共同承担两个自由度的输出,实现更彻底的扭矩共享。两台电机都是刚性固定在前臂上,不会像很多 RSU/SPU 结构那样跟着手腕晃来晃去;手腕本体保持细长、同心,由差速+连杆来承载俯仰和偏航。这样一来,俯仰自由度不再因为“顺带扛着偏航载荷”而被大幅削弱,扭矩分配和载荷路径都更干净。
从机构形式上看,传统 SPU 架构里的“S(Spherical)”意味着连杆端必须采用球面关节或万向铰(heim joint),因为存在大量“面外运动(out-of-plane motion)”,这不仅让机械实现更复杂,也让运动学与受力分析变得更麻烦。而他们这套设计则尽量把运动限制在同一平面内:连杆可以用非常简单的平面四杆+普通销轴关节来实现,配合“平面内的弧形槽”即可完成机构运动,不再需要复杂的空间圆柱槽。换句话说,他们用一个“平面机构”的手段,做出了一个在输出上类似球面关节功能的手腕,在机械和数学层面都清爽很多。
还有一个很容易被忽略,但其实非常关键的细节,就是:他们每一侧用了两根对称连杆,而不是一根。从纯粹传力角度来说,一根刚性拉杆就可以完成任务,但他们选择双拉杆对称布置,目的是让施加在该轴上的载荷和弯矩更加平衡。如果只从一侧施力,虽然能够产生所需扭矩,但会引入额外的弯曲载荷(bending),使得轴不仅承受扭转,还要承受不必要的弯曲。通过双拉杆对称施力,可以显著降低弯矩,让该轴主要工作在扭转状态,从而提升寿命和刚度。所以,双连杆并不是“多此一举”,而是很认真的寿命与刚度工程考量。
他也提到,有人在评论区说“我们实验室几个月前也做过类似设计”。他的回应大意是:也许你们确实早就想到了,但这是第一次在面向公众的人形产品上,以这种清晰度展示出来。这意味着,这种方案很可能会成为业界未来认真研究的“替代手腕架构”,作为传统 RSU/SPU 方案之外的另一条路线。核心可以浓缩成一句话:用“锥齿轮差速+双电机扭矩共享”替代万向节,电机固定在前臂,通过对称连杆驱动一个细长且轴线同心的手腕。
当然,这种设计也不是没有代价。最大的问题在于:前臂横截面的空间被这些差速与连杆机构基本占满,如果你还想在里面留出一条类似“腕管(carpal tunnel)”的通道,去布置一整套肌腱驱动的灵巧手腱线,就会变得很困难。也就是说,这套手腕方案和“手部肌腱满配”路线,在空间上是有明显博弈的,可能需要走不同的手部形态或布置方式。但即便如此,他的整体态度仍然是:这是一个非常有意思、值得深入研究的新方案。
类似的思想也延伸到了肘关节。他们并没有把执行器直接塞在肘关节中心,而是同样采用远程驱动:在上臂靠近“肱二头肌”的位置,有一个沿着肘关节旋转轴线布置的执行器,然后从这个执行器两侧伸出两根黑色连杆(tie rods),分别沿肘部的内侧和外侧向下连接到肘关节本体。
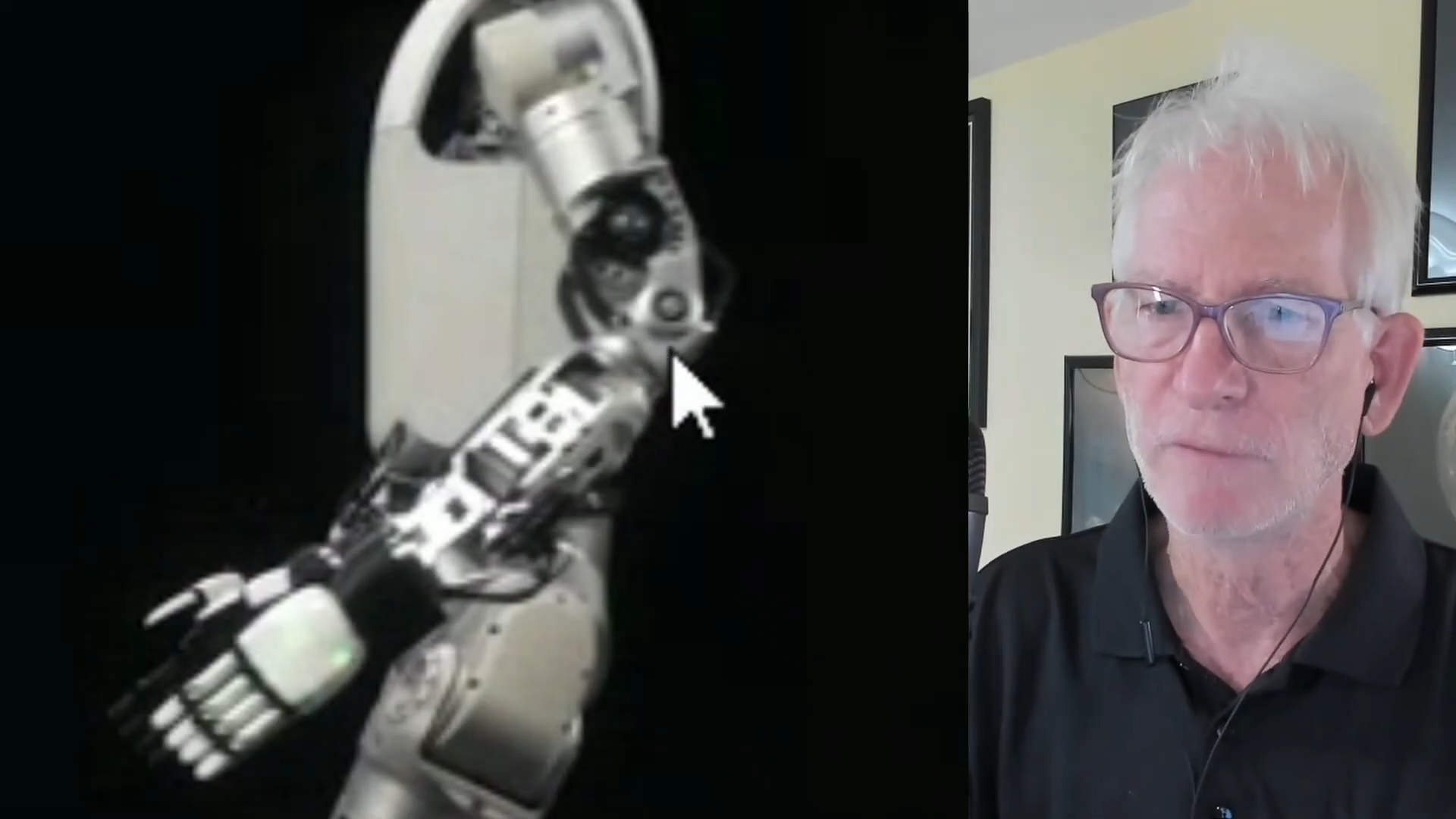
也就是说,肘关节同样采用“双侧对称连杆驱动”,而不是从中间单点拉一根。 这一点和手腕的设计逻辑高度一致:通过对称驱动,把施加在关节上的载荷分散到两侧结构上,降低单点弯矩,使肘部转动更加“纯粹”而不易发生偏摆或扭曲。他甚至提到,也许膝关节也应该采用类似的双侧连杆结构,而不是只在中间拉一根,因为他们在膝盖上已经看到了典型的“晃动”副作用。
他们把一侧的输出往下传到下面去,但这样会带来一个问题:那根“单边传力”的结构容易出现轻微的扭转和一点点弯曲,结果可能让关节出现轻微卡滞(bind up)。
如果能在两端同时、等量施力,运动就会更顺:动作更平滑、转动更顺滑。所以他们的思路大概率是:干脆把传力结构做成上下各一套/两侧对称。你可能会觉得“用一个就够了”,但他们选择用两个——我认为这并不算坏主意。
我个人会更倾向把这种“双端/对称施力”的思路用在膝关节上;但也可能他们担心膝部那样做会让零件暴露得太多,所以膝关节用了中间一根杆的方案。直觉上我会觉得在膝盖这么做更划算,因为能把结构收得更紧凑,同时仍然能在下肢获得更大的力和更高的强度。这是一种可能的优化方向——我有点意外他们没这么做。
这背后的核心理念其实和“肘部不要做成执行器本体”是一样的:不要让关节本体直接承担过多载荷。从四肢远端(distal parts)的设计能看出来:他们在刻意把执行器隔离/远离关节,让关节保持为更刚、更可靠的纯机械关节去承受外部载荷。这么做很可能是因为他们想要更高的负载能力(higher payloads),以及更好的整体结构强度。


他们宣称(不含手)总共 29 个自由度(29 DoF excluding the hands)。他快速拆了一下:手臂贡献 14(每条手臂 7),腿贡献 12(每条腿 6),合计 26,剩下 3。这 3 个看起来是:腰部一个绕 Z 轴旋转,以及头部大概率 2 个自由度(他没看清,但根据他做的一点资料查证,头部似乎确实是 2DoF),这样就凑到 29。
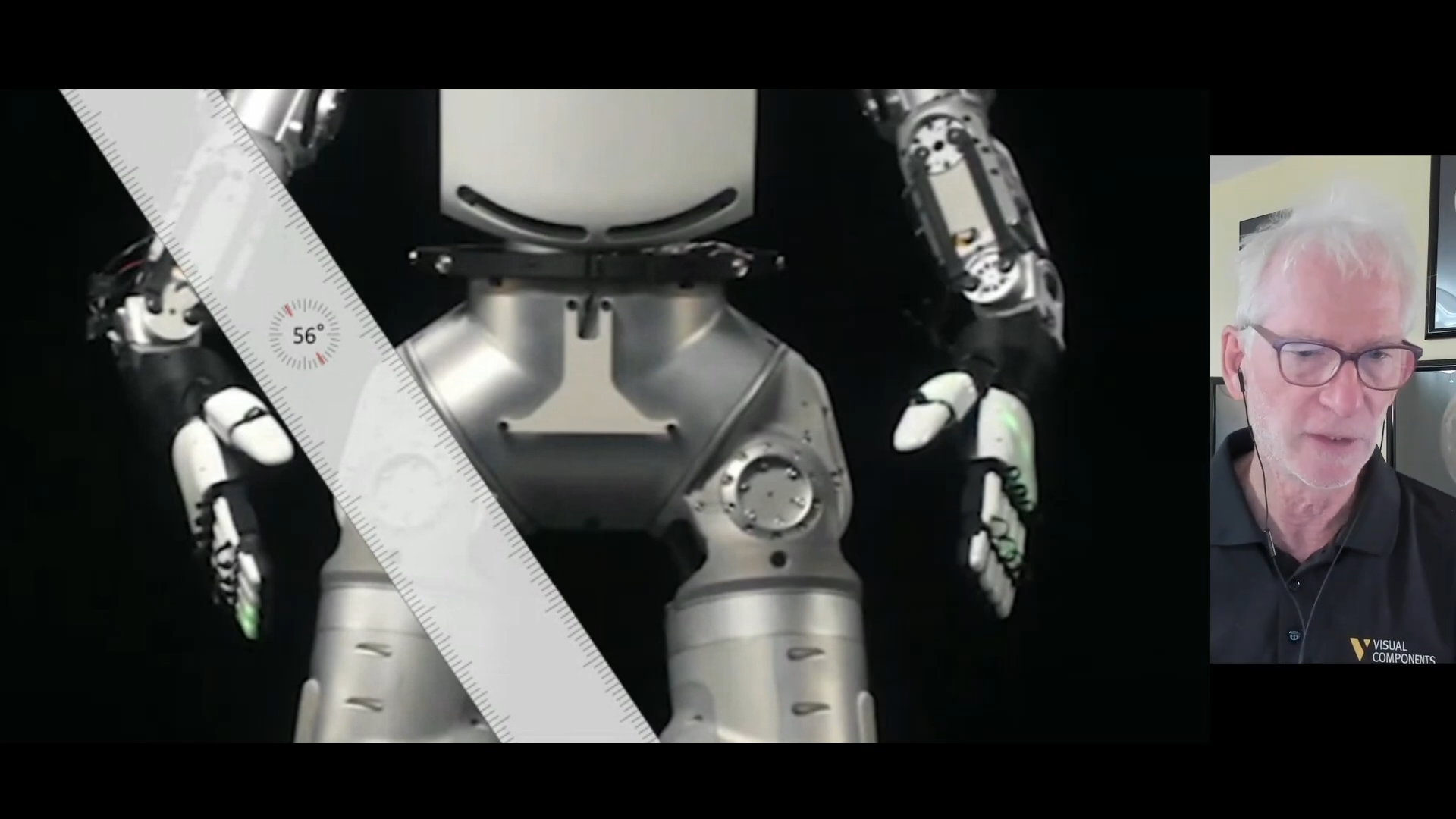
然后他讲肩部:肩的总体结构没太多可说,因为大家都差不多,基本都是那种常见的肩部执行器布置。
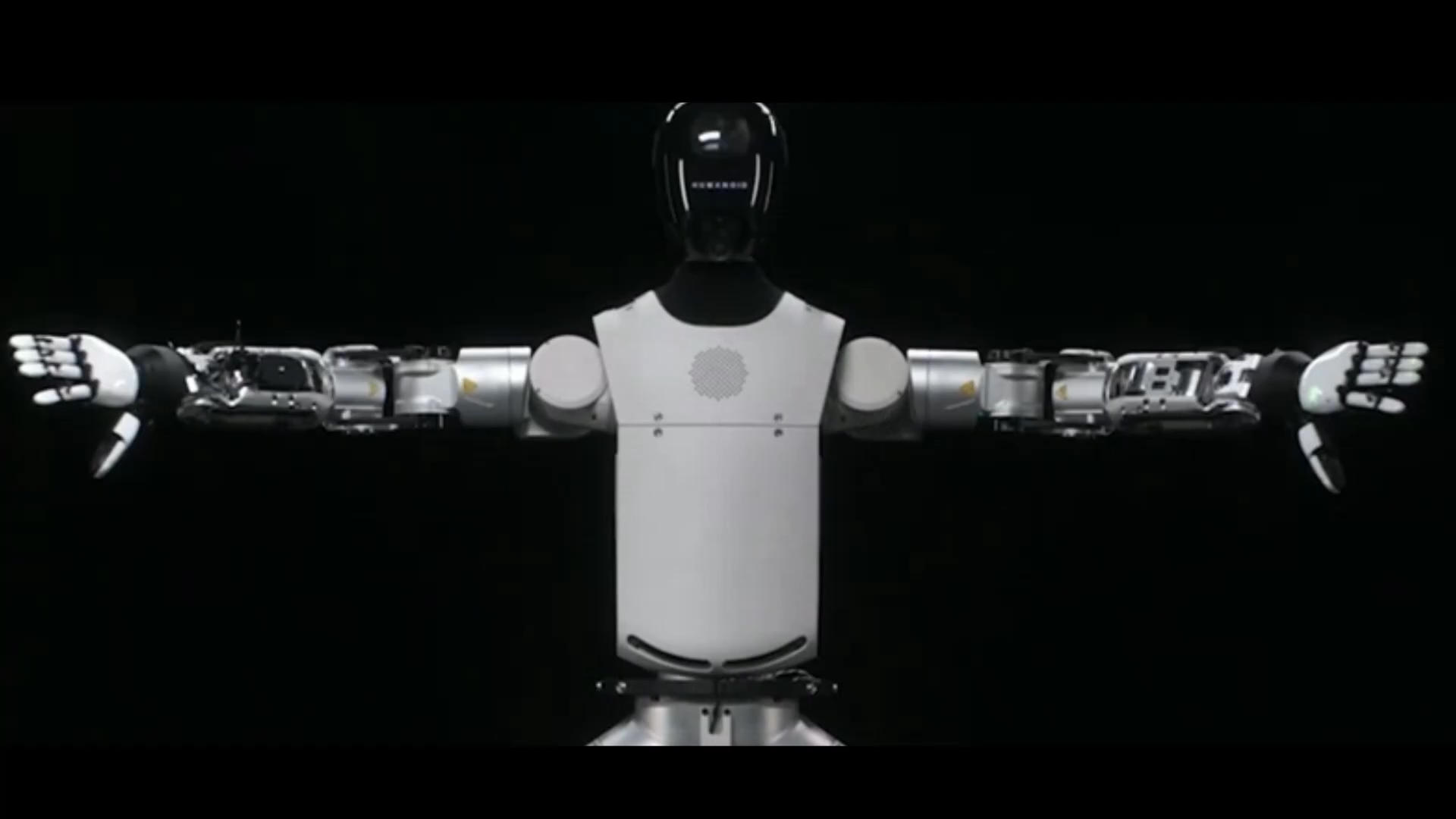
真正的问题反而是它的安装角度:躯干外形会“骗你”,让你以为肩是往下(anhedral)收的,但实际上肩部有一点上反角(dihedral angle),从侧视角才能看出来。
他用尺子量了一下,发现这个上反角并不大:
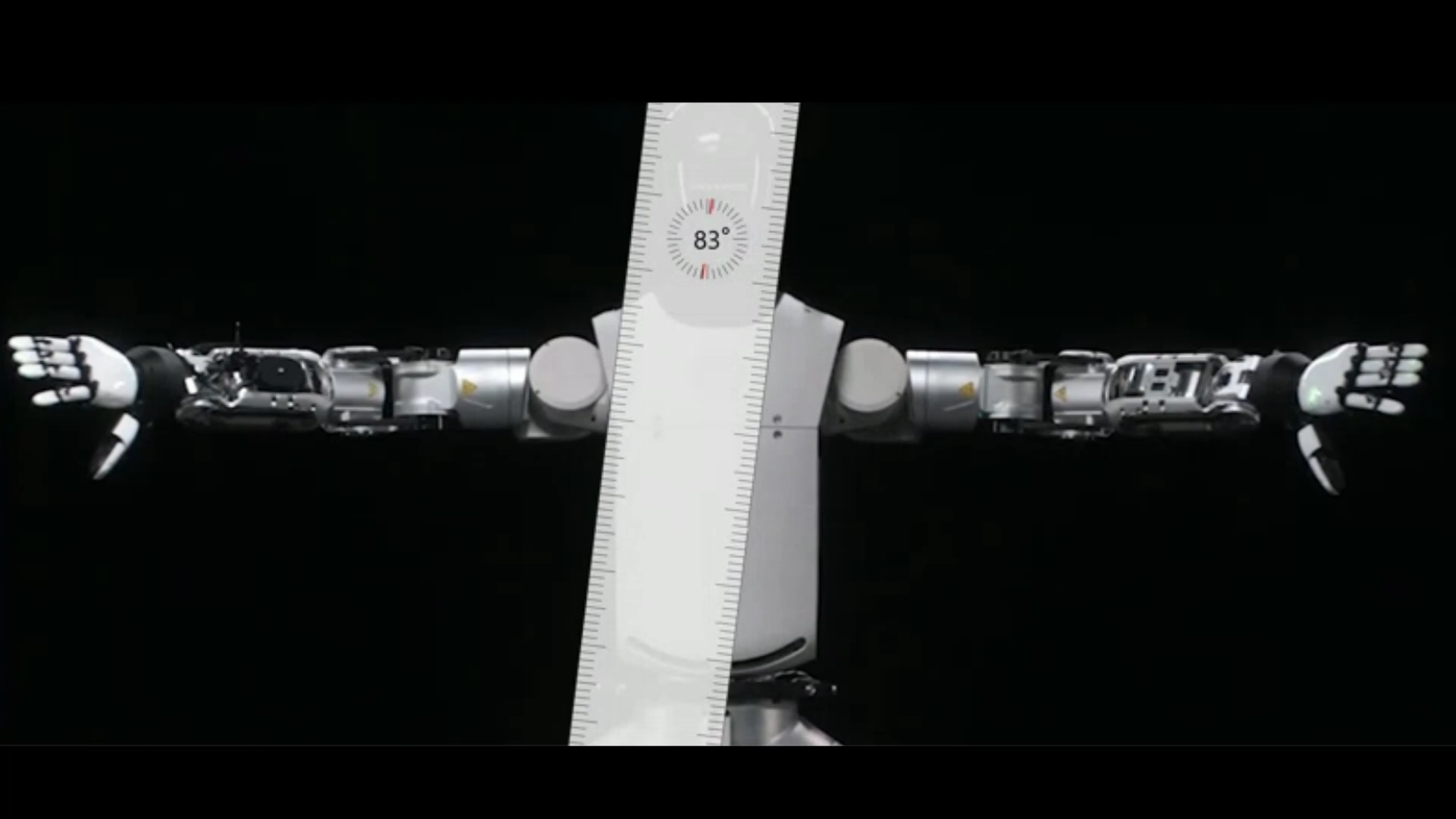
大概只有7°(图上是 83°,取补角得到约 7°)。而其他很多方案会做得更大,目标在 15°、20°,甚至有做到 30° 的。这样做的核心目的,是为了尽量避开奇异位形(singularity)。
他还提到一个现象:在视频里,当手臂水平伸出、前臂往里收的时候,肩部附近那个轴居然出现了不该有的转动,这让他很惊讶——因为按理说肘的位置并没变,只是前臂收回,不应该看到肩部那条轴“跟着转”。结合前面量到的“只有 7°”的上反角,他推测:他们可能让机构进入了奇异区域附近,所以才会出现那种小幅异常运动;他觉得也许应该把这个角度做得更大一点来避开那段区域。
对“这种肩部旋转结构是不是最佳设计”这个问题,他的回答是:在目前这种执行器与传动思路下,这基本是行业通用做法、也是“目前最好的折中”。除非有人能拿出一种更不一样的传动策略(比如更强的并联/并行传动思路),否则大家大概率都会这么做。真正要优化的关键还是:那个上反角到底应该设成多少。
后面他们又回到“整机控制”讨论:对方提到“48 小时内就能走、做了很多 RL、准备了 whole-body controller(全身控制器)”。

但他观察到机器人走路时手臂不怎么参与摆动(像“猩猩手”那样垂着),
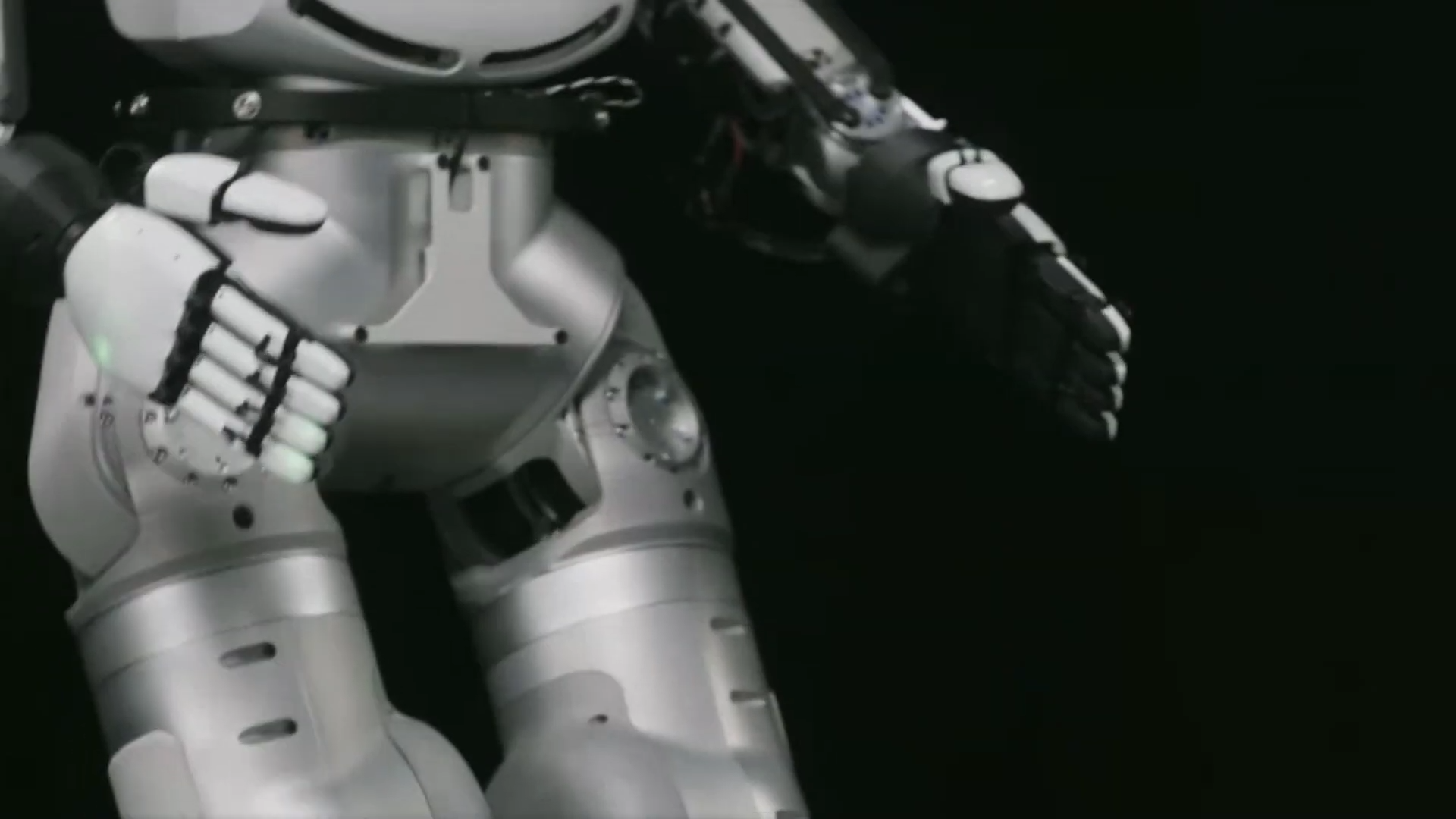
因此他质疑这是否算得上真正的全身控制(whole body control),觉得他们的 RL 可能还没做到“全身协同”的程度。
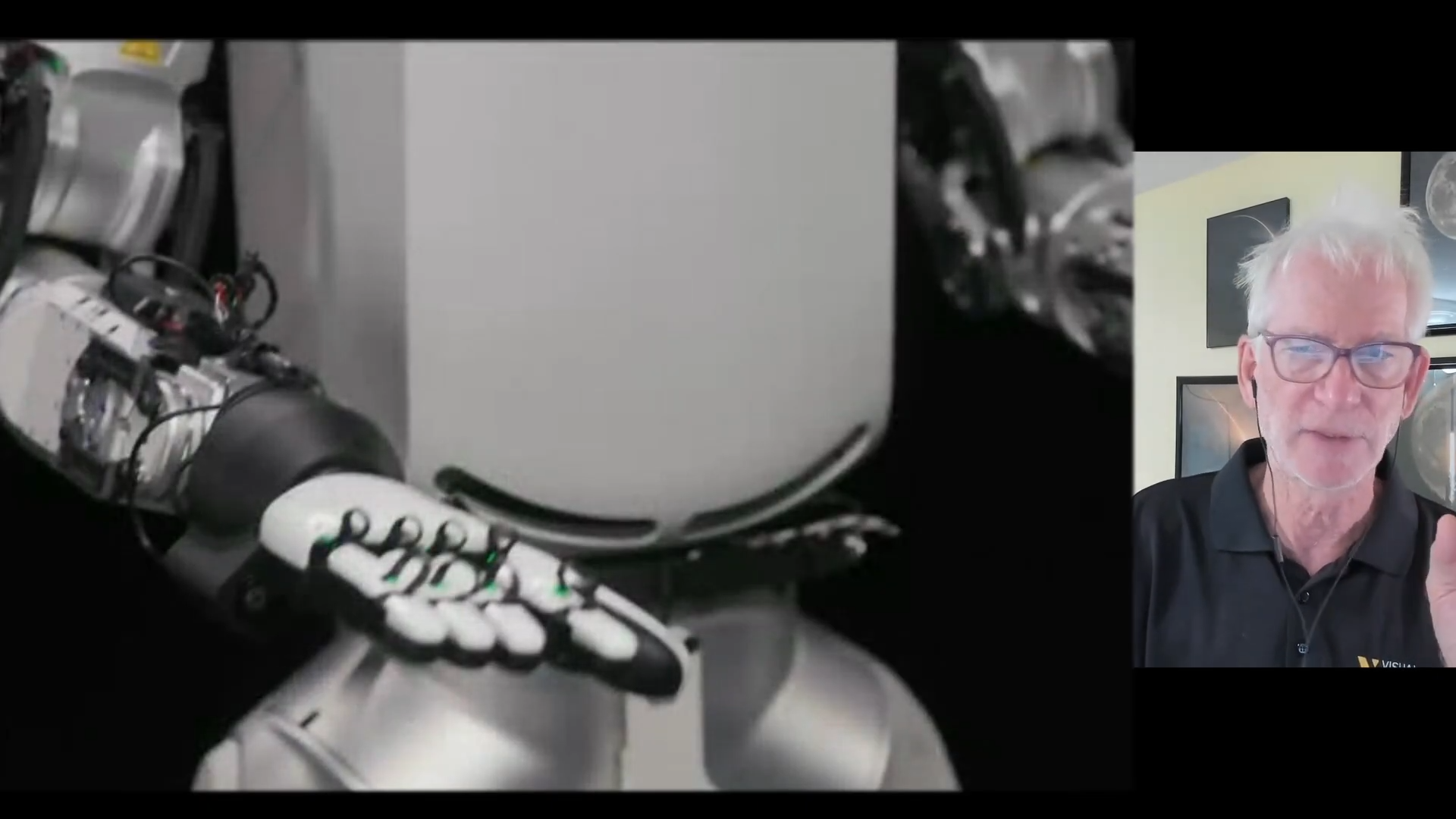
12 自由度手:只给食指外展的折中方案
他认为这是一只 12DoF 的手,并开始拆 DoF 从哪里来。四根手指如果每根 2DoF 就是 8DoF,因为它们似乎少了一个 IP 关节。要到 12 还差 4 个,直觉上就只能从拇指来补:拇指看起来有 1 个 IP,再加上 CMC 处可能有 2 个(屈伸 + 类似对掌/内收外展的运动),这样拇指总共大约 3DoF,但仍然差 1,所以他一度困惑“第 12 个自由度从哪来”。
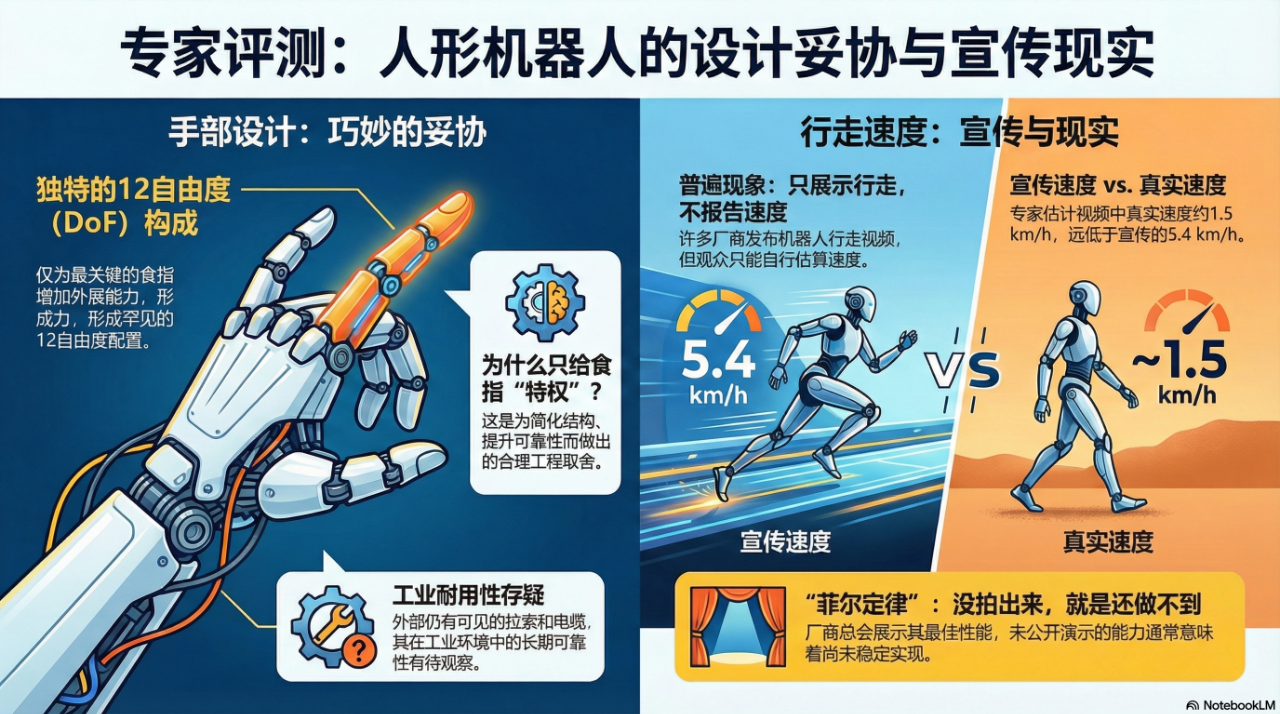
食指额外有一个外展/内收(abduction)自由度。他指出另外三根手指彼此平行,但食指明显外展了——也就是说只有食指做了额外的侧向自由度。原因推测是:食指对捏取(pinch)和很多抓握最关键;如果给每根手指都做外展会太复杂,所以他们只给食指加了这一关节,于是就形成了这个比较少见的 12DoF 手(他也说这是他第一次听到 12DoF;更常见的是 11、16 这种“常见组合”)。
他注意到,这只手只有食指有外展(abduction),其他手指没有,这是一个比较合理的取舍:少做一点自由度来换结构简单和可靠性。但他也坦白说,自己不确定这只手在工业场景里的“耐造程度”,因为他们要进的是工业环境。整只手的复杂度比很多同类少一些,但还是有不少拉索、电缆从手里伸出来,在其他画面里可以看到。
现在这只手的灵巧度够用来拿咖啡杯和一些简单物体,但将来是不是足够应对更多工业任务,还要观察。

好在手臂和末端可以换成标准的拍板式夹爪,满足典型的搬运、上下料任务;而且这肯定也不会是它们最后一代手部设计。目前看,触觉和力反馈做得还不错,已经足够支撑一些基础抓取任务,所以这套设计还是有不少值得参考的点,可以持续观察它们后续怎么迭代,也能帮我们理解现在人形手部设计的一些折中和微调空间。
接着他开始发牢骚,说自己对 “只走路、不报速度”的展示视频非常不满。现在很多厂商都在疯狂发机器人走路的视频,但几乎没人老老实实告诉你走多快。大家只能去盯着脚长、步距、时间戳,自己估算速度,还得祈祷视频不是倍速播放。官网和宣发物料会写「最大 5.4 km/h」之类的数,但 从来没公开演示过这个速度。他推测,这种数大概率是从强化学习 / 仿真环境里算出来的,而不是机器人真实在地面上跑出来的。仿真里的物理和现实世界差得远:一落地才发现脚在打滑、接触不如预期,这时你才会后悔没做趾关节、趾盒等结构,导致难以达到宣传里的“快速步行速度”。他个人估计,视频里面的真实速度顶多 1.5 km/h 左右,而不是宣称的 5 km/h 以上。他说,如果厂商真的能稳定跑到宣传的速度,一定会拍出来给大家看——既然没拍,那八成是还做不到;这就是他调侃的“Phil 定律”:能做又好看的一定会被拍出来宣传,没拍就是还做不到。
他提到一个例外是 优必选 Walker,他们曾经明确展示了从 0 到 2 m/s 的行走,并在视频里把速度标出来,这种做法他是认可的,希望更多厂商能像这样,把速度标清楚,而不是只给一个 PPT 上的最大值。
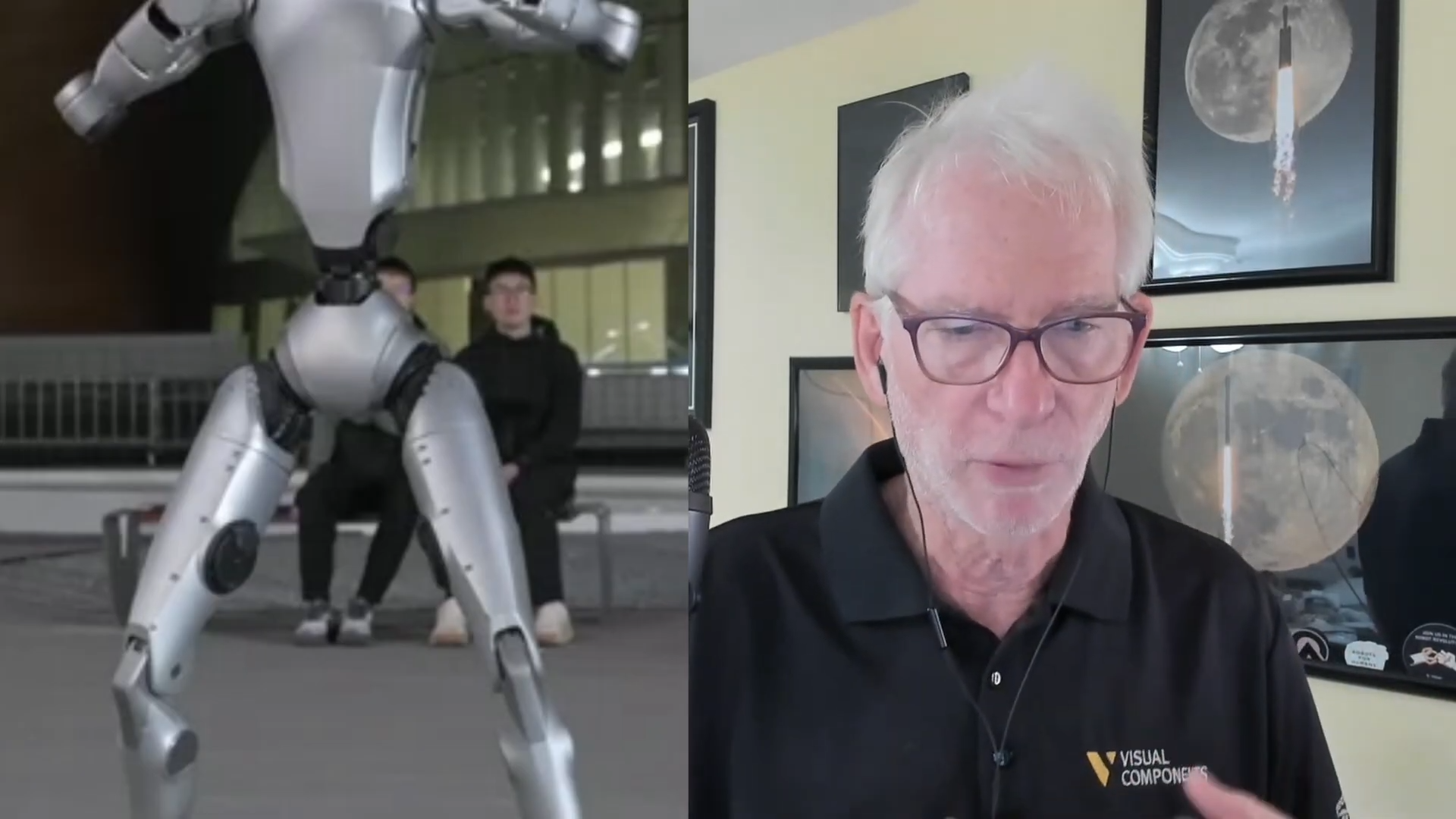
从 Humanoid 到 T800:下反角髋关与极限动作下的奇点风险

然后话题跳到最近很火的 Engine AI 的 T800 视频。他承认,那段表演非常快、非常“酷炫”,配了很多舞台灯光、烟雾,导致不少人怀疑是不是 CG。以他的判断,这是“真机”表演,而不是纯特效:Engine AI 之后也放出了幕后拍摄花絮,有机器人真正在场景里表演和拍摄的画面,足以证明是真实物理机器人。

他说,Engine AI 之前沉寂了好一阵,大概就是在闭门死磕,把这代原型机做出来;这次是他们第一次把原型机实物摆出来让大家近距离看结构和动作。
他让大家反复看 T800 的右腿和髋关节:在那段“武打风格”的踢腿、空中踢动作中,右侧髋关节在前后剧烈扭动。这里涉及一个老话题:带有下反角(anhedral angle,大约 30°)的髋关节设计。这种下反角结构意味着髋关节在某些姿态下会非常接近甚至踩到奇异位姿(singularity)。他半开玩笑说,有了这样的下反角,机器人基本“不可能劈叉”,因为腿一旦分得很开,就会逼近奇点。平时走路可能没事,但一旦做大幅度空踢、腾空腿分得很开的动作,就很容易在奇异位姿附近乱跳。
在那段视频里,你如果把画面逐帧看,会发现:髋关节执行器几乎在一帧到下一帧之间就转了上百多度,看起来像 120° 甚至更多的往返扭转,非常快、非常猛。这就是因为膝盖和髋关节的相对姿态被摆在了奇异位姿附近,控制器为了追踪动作,不得不疯狂旋转那个自由度去“补姿态”。他和旁边的人总结一句:“要避免奇点,就别把结构做成下反角;或者说,至少别在需要大范围侧向动作的场景里用这种几何。”更理想的做法是把下反角拉平一点,减小甚至取消 anhedral,让关节在大动作时远离奇点区间。
他也承认,很多团队喜欢下反角,是因为在某些摔倒、翻滚、特殊姿态里,它能带来额外的活动空间和柔韧性,你能看到像 LimX 等公司也在利用这种自由度。但在这段高强度武打动作里,这种几何设计就有点“搬石头砸自己脚”——从影片里那种剧烈抖动可以看出,这样的结构在极端动作下既不优雅,也可能非常伤机械寿命。
最后,他补了一句关于真假争议:网上很多人一开始在吵这段是不是 CG,他本人从来没怀疑过这段是假的,因为他很清楚全球研发节奏,“知道他们迟早会做出这种东西”。他只是觉得现在的舆论环境特别喜欢把“真 / 假”炒成话题,而对他这种工程师来说,真正关心的是:结构怎么设计、奇点怎么处理、行走速度能不能公开量化、以及这些设计在真实世界里到底耐不耐用。
来源与致谢:本文参考了 https://www.youtube.com/watch?v=vwski1n9_9E 如涉及版权或引用问题,请联系处理
👇 扫码加入「AI工业」知识星球,获取更多资料

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
