
在人形机器人系统中,关节执行器(Actuator)被誉为机器人的肌肉”。它直接决定了机器人在运动能力、负载能力、动态响应以及系统成本**等方面的表现,因此是整个机器人设计中最关键的核心部件之一。
随着技术演进,行业内关节驱动方案已经经历了从早期液压驱动向全电驱动(Electric Drive)的显著转变。相比液压方案,全电驱动在轻量化、控制精度和系统集成上具有明显优势,同时也为量产化提供了可能。
不过,根据不同关节的功能定位——例如手臂、腿部、灵巧手——电驱动的实现方式又呈现出明显的差异化。不同的技术路线在扭矩输出、响应速度、柔顺性和成本等方面各有侧重,形成了目前行业内几条代表性的技术方向。
下面将对当前人形机器人关节执行器的主要技术路线及特点进行详细解析
人形机器人关节执行器四大技术路线全景对比
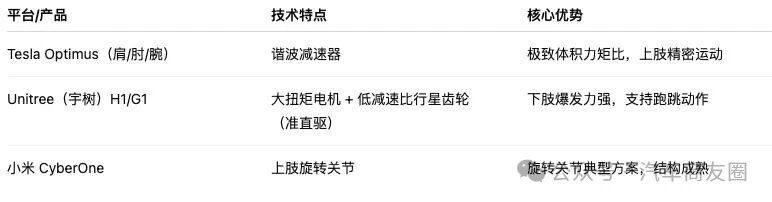
一、 旋转关节技术路线 (Rotary Actuators)
——成熟稳健的“刚性骨架”
这是目前应用最广泛、产业链最成熟的人形机器人关节路线。
该方案通过电机旋转产生力矩,模拟人类关节的转动,例如肩关节的圆周运动、腰部的扭转。根据减速方案的不同,又可细分为两类:
精密派(谐波减速):追求极致体积力矩比,适用于上肢精密操作
爆发派(行星 / QDD):追求高扭矩和动态响应,适用于下肢和腰部
核心配置
驱动
无框力矩电机(Frameless Torque Motor),高功率密度、高响应,适合紧凑空间布局
传动
谐波减速器:以上肢关节为主,实现高精度定位和紧凑体积
行星 / 摆线减速器:下肢和腰部关节为主,兼顾大范围转动和高扭矩输出
传感
双编码器 + 扭矩传感器,实现闭环控制与力矩监测;
代表厂商与产品
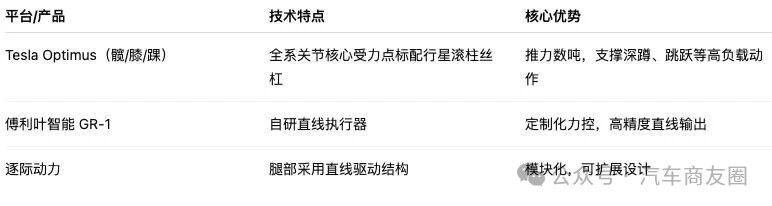
二、 直线关节技术路线 (Linear Actuators)
——力量与爆发的“液压替代者”
为了模拟人类大腿肌肉的收缩与伸展,特斯拉 Optimus等平台率先采用了电动缸(Electric Cylinder)替代传统液压缸,实现了电驱动在高负载关节上的突破。电动缸通过将旋转运动转化为直线推力,能够提供极高的负载能力,同时保持电驱动系统的可控性和精度。
核心配置
驱动
无框力矩电机(Frameless Torque Motor),高响应、高功率密度。
传动
高端/重载:行星滚柱丝杠(Planetary Roller Screw),推力可达数吨,刚性极高,寿命远超滚珠丝杠。
中低端:梯形或滚珠丝杠,适用于轻量化或成本受控场景。
结构
倒置式行星减速机构 + 连杆,兼顾空间布局与负载传递效率。
代表厂商与产品
适用场景
手掌内部关节与手指自由度驱动,用于抓取、捏合、精细操作等场景
优缺点分析
优点
体积极小,适合紧凑空间
响应速度快,运动精细
可实现复杂的多自由度操作
缺点
输出力较小,对硬物捏握能力有限
腱绳方案寿命较短,易磨损
电机散热成为持续高负载使用的瓶颈
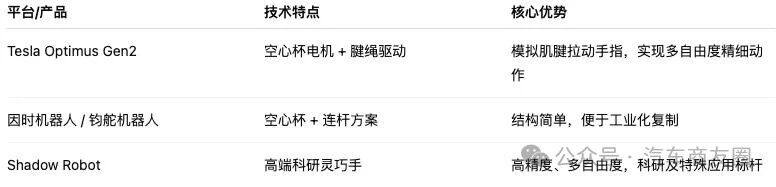
三、 灵巧手微型执行器路线 (Dexterous Hand Micro-Actuators)
——精细操作的“末端神经”
灵巧手是人形机器人最复杂的部位,要求在极小空间内实现多自由度(DOF)运动,同时具备高精度、高响应的操作能力,是机器人完成抓取、捏合等精细动作的关键。
核心配置
驱动
空心杯电机(Coreless Motor),轻量化、高响应,适合多自由度紧凑空间布局。
传动
精密微型齿轮箱 / 蜗轮蜗杆(自锁特性)
腱绳驱动(Tendon-driven),模拟肌腱拉动,实现手指运动的柔顺性与可控性
代表厂商与产品
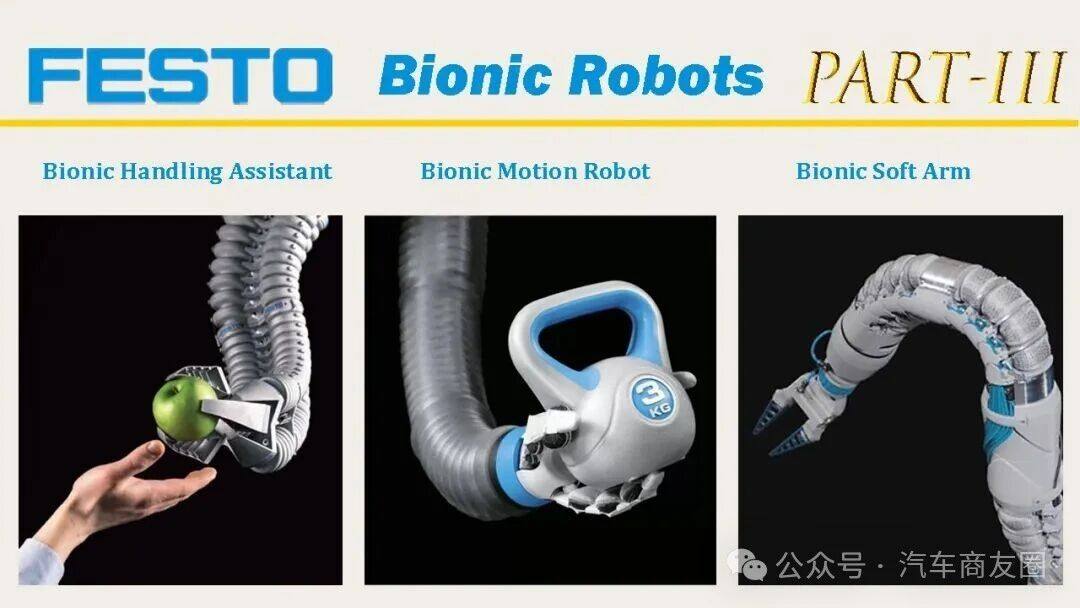
四、 柔性仿生技术路线 (Flexible Biomimetic / Artificial Muscle)
——丝滑交互的“人造肌肉”
这是需要特别关注的新兴路线,以小鹏PX5为典型代表。它不再追求工业级的绝对刚性,而是引入了物理层面的“弹性”和“阻尼”,试图在物理结构上复刻生物肌肉的特性(Passive Compliance)。
- 核心配置:
- 驱动: 伺服电机 / 直线驱动器(源头仍是电驱)。
- 传动/缓冲:3D打印晶格结构(Lattice Structure) / 高分子人工肌肉材料 / 气动/液压人工肌肉。
- 原理: 小鹏方案是在直线驱动器的末端串联了一个由高分子材料3D打印的“多孔格栅”结构。这个格栅充当了类似肌腱和肌肉腹的非线性弹簧,提供物理缓冲和储能。
- 代表厂商/产品:
- 小鹏鹏行 PX5: 采用了“刚性直线驱动 + 柔性3D打印晶格”的混合仿生关节。
- Festo(费斯托): 气动人工肌肉(Pneumatic Muscle),早期仿生的代表。
- Clone Robotics: 采用液压驱动的仿生手,极度接近人体解剖结构。
- 适用场景:
- 家庭陪伴、老人护理、儿童交互: 任何需要与人直接接触、拥抱、握手的场景。
-
不需要搬运重物,但需要动作极其自然、步态优雅的场景。 - 优缺点:
- 精度较低: 柔性材料存在滞后效应,难以实现毫米级的工业定位精度。
- 刚度控制难: 较难像刚性机器人那样举起非常沉重的物体(材料会过分形变)。
- 材料寿命: 3D打印的高分子材料在反复拉伸后的疲劳寿命不如金属齿轮。
- 动作丝滑: 物理柔性过滤了电机的抖动,动作看起来像真人一样流畅,没有机器味。
- 本质安全: 碰撞时,晶格材料会变形吸收能量,不会像刚性手臂那样把人打伤。
- 高爆发储能: 类似于跟腱,可以在行走时储存弹性能量,提高能效。
- 优点(独有优势):
- 缺点:
总结与核心配置对比表
趋势点评
如果说特斯拉代表的是人形机器人的**“工具属性”——强调干活能力、搬运效率、结构刚性与动作精度;
那么以小鹏为代表的另一条技术路线,则更侧重探索机器人的“伙伴属性”**——强调交互能力、陪伴价值、安全性以及动作的自然与柔顺。
两者并非对立,而是面向不同应用场景的技术取舍。
在工业、物流等高确定性场景中,“工具型”机器人具备天然优势;而随着家庭服务、公共空间等复杂环境逐步展开,具备物理柔性和行为亲和力的机器人,将更容易被真实世界所接受。
从长期看,人形机器人的终极形态,未必只是一台效率机器。
在“能干活”之外,“能共处、能被信任”,将成为同样重要的技术指标。
而围绕柔性、安全与仿生交互构建的技术路线,未来很可能在家庭与服务场景中,占据不可忽视的一席之地。
未来的演进趋势
目前行业正在向“刚柔并济、高度集成”的方向发展:
总结:
- 一体化关节(Integrated Joint): 将电机、减速器、控制器、传感器封装在一起,形成标准化模块(“关节模组”),即插即用。
- 国产化降本: 特别是行星滚柱丝杠和谐波减速器,目前是中国产业链攻关的重点,旨在将单台机器人的BOM成本降至2-3万美元以下。
- 电机拓扑优化: 针对机器人定制的轴向磁通电机(盘式电机)因其轻薄、高扭矩密度的特点,正逐渐受到关注。
源自:汽车商友圈
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
