

诸葛亮兵书《将刚》提到:“善将者,其刚不可折,其柔不可卷,故以弱制强,以柔制刚。”以柔制刚,是古人延续至今的智慧;同时,在工业端也有这样的一个装置,以“以柔克刚”精密运动的方式,颠覆了传统刚性工业装置,成为了机器人关节中的灵魂角色,让其能像人的手臂/大腿一样灵活、精准地转动和定位:它就是【谐波减速器】。
【谐波减速器(Harmonic Gear Drive)】是什么呢?
根据GB/T 30819-2014《机器人用谐波齿轮减速器》定义,谐波减速器是一种靠波发生器使柔轮产生可控的弹性变形波通过其与刚轮的相互作用,实现运动和动力传递的传动装置。
(💡“谐波”取名的由来:谐波减速器原理就像是让一个有弹性的齿轮“扭动”起来,通过这种谐和的波浪形变形来实现传递运动,因此得名。)
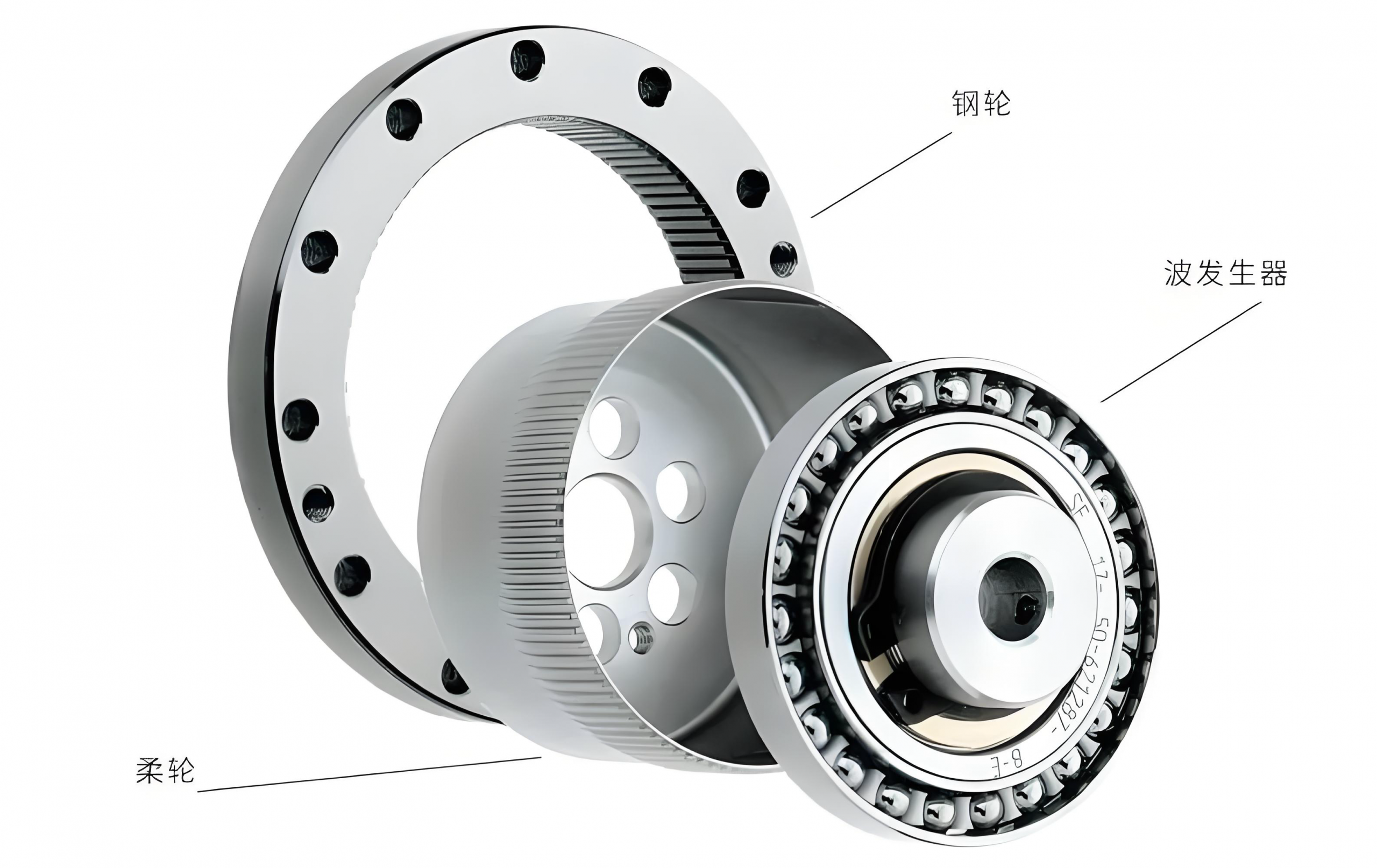
图、谐波减速器及核心构成
(波发生器、柔性齿轮和刚性齿轮)
(资料来源:网络)
【核心构成&工作原理】
谐波减速器的核心构成:
①刚轮(Circular Spline):带有内齿圈的刚性齿轮(刚轮)。其齿数略多于柔轮,常见的齿数差为2齿,这是实现大减速比的关键。刚轮采用高硬度合金钢制造,确保在长期啮合过程中保持形状和精度不变。
②柔轮(Flexspline):带有外齿圈的柔性齿轮(柔轮)。其壁厚通常只有1-2毫米,采用特殊合金钢经热处理和精密加工而成,既需要足够的弹性以产生可控变形,又需要高强度以承受反复的应力循环。
③波发生器(Wave Generator):是产生可控弹性变形波的关键部件。最常见的波发生器是椭圆形凸轮,当波发生器装入柔轮内孔时,会使柔轮产生规律性弹性变形,实现了齿轮间的啮合与运动传递。
谐波减速器的工作原理:柔轮的弹性变形和齿轮啮合的错齿运动。即通过波发生器让柔轮变形,柔轮外齿与刚轮内齿依次啮合来实现减速。(为了方便大家理解,可以参考视频动图👇)
视频、谐波减速器的核心构成和原理
点击视频中央可播放
(资料来源:哈默纳科)
⭐简单理解:
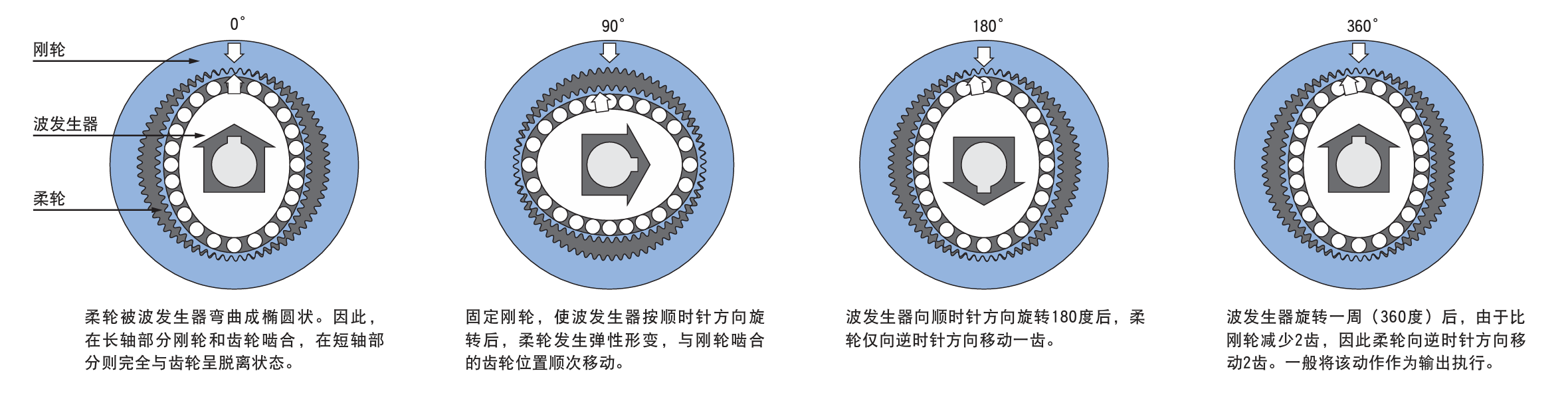
波发生器就像是一个“造型师”,它被电机驱动塞进柔轮内部后,会把圆形的柔轮撑成稳定的椭圆形;椭圆形的柔轮与圆形的刚轮进行“啮入→啮合→啮出→脱开→再啮入”的循环过程,从而实现运动传递(如图)。
图、谐波减速器工作原理
(资料来源:哈默纳科)
谐波减速器的减速比是多少呢?
减速比用于衡量一种机械传动装置的减速程度,可以帮助确定输入轴(通常为电机)和输出轴(通常为机械部件)间的旋转速度比率,从而实现减速增扭(可以简单理解为慢下来”和“有劲起来”能力的倍数)的目的。
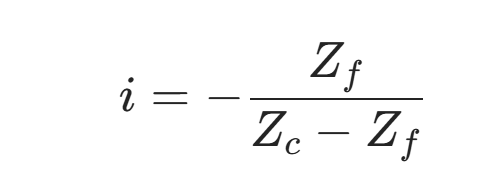
减速比(i),刚轮(Zc)固定,波发生器(H)作为输入,柔轮(Zf)作为输出:
-
公式解读:
③负号(-):表示输出件(柔轮)的旋转方向与输入件(波发生器)相反
-
举例说明:
刚轮齿数Zc=102,柔轮齿数Zf=100,齿数差为2,减速比i=-100/(102-100)=-50
【技术核心壁垒】
谐波减速器的核心壁垒,本质上是一场在微观尺度上对材料、设计和工艺控制的极限挑战:
①材料:柔轮材料的高纯度需求以及热处理工艺复杂
通过上面的谐波减速器原理和结构的分析,可以看到【柔轮】是这里面最特殊的结构件,需要分钟发生上千次的弹性形变,因此,柔轮材料既要有足够的弹性(易于变形)又要有极高的强度(抵抗疲劳断裂),同时需要承受高频的周期性变形。
目前,业内多采用类似40Cr合金钢这样的特种钢材,该材料需高杂质控制水平同时其热处理工艺(温度、时间控制)极为苛刻。
②设计:齿形设计直接决定了其核心性能(精度、寿命、刚度和效率)
01齿形设计要满足以下特点:
-
实现连续、平稳、无间隙的啮合,传动误差要极小
-
最大化承载能力与疲劳寿命,齿面接触柔轮的应力要尽可能均匀分布,避免出现应力尖峰,提升减速器的使用寿命
-
高扭转刚度与高效率,有效抵抗负载下的弹性变形,优化齿面间的相对滑动,降低摩擦和磨损
02实现起来有以下难点:
-
理论与建模的复杂性:谐波传动理论、啮合数学建模、齿轮齿形设计等理论和设计工作
-
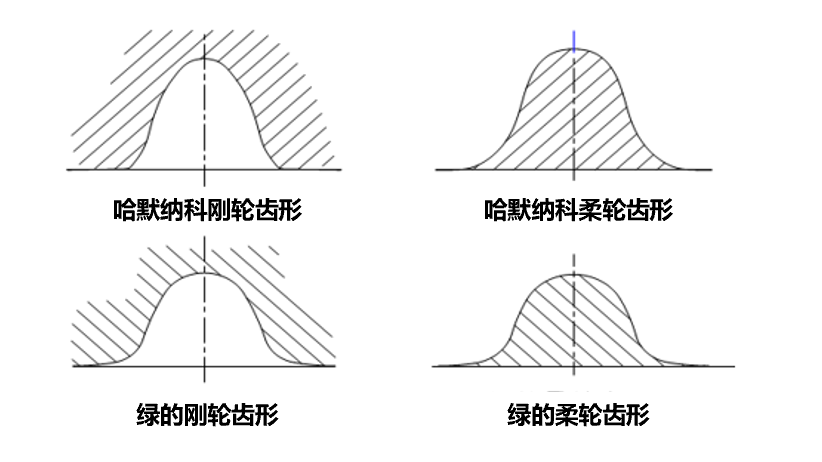
打破专利壁垒,行业领先者(如哈默纳科)早已在其齿形(如IH齿形,如图)上构筑了专利护城河,后者需要另辟蹊径(如绿的P齿形,如图)
-
理论到现实的实现工况复杂度,如谐波减速器的齿形精度要求达到微米级(0.001mm)
图、谐波减速器齿形设计
(资料来源:绿的谐波)
③工艺:材料分析和处理、精密加工和装配及综合性能测试
01理论→现实(从0到1)
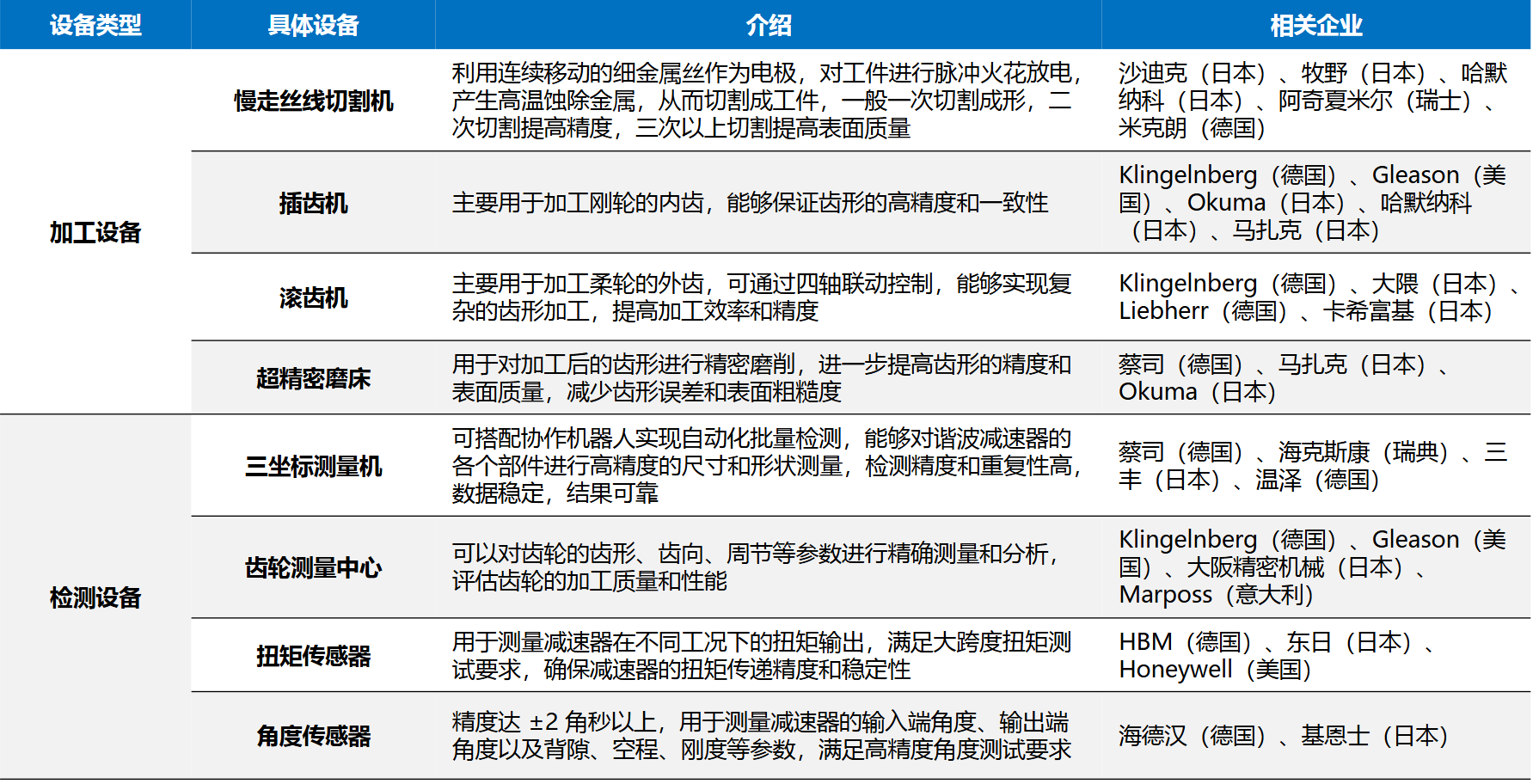
加工精度(微米级-0.001mm)决定了设计能否被呈现:需要加工出微米级精度的柔轮和波发生器需要高精度五轴数控机床、磨床和滚齿机等设备以及配套的定制化刀具等,其成本高昂且同时需要经验丰富的技术人员反复调试。
图、谐波减速器生产加工设备
(资料来源:GF Machining,长机科技,东芝,三丰精密,东吴证券研究所)
02量产(从1到100)
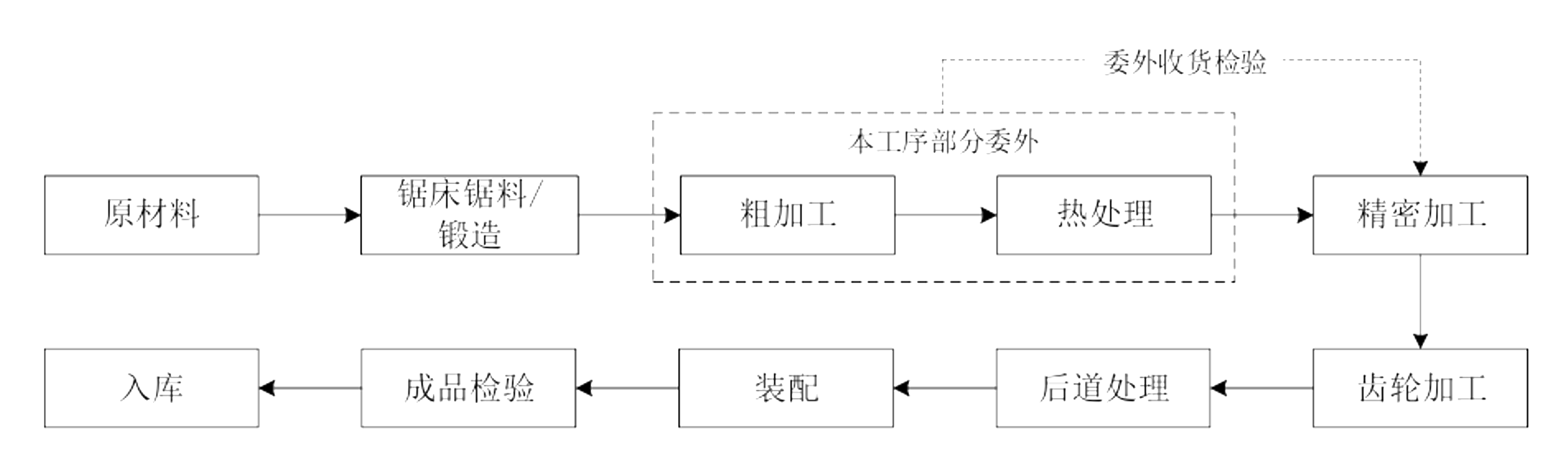
量产阶段的本质是实现商业化,实现更低成本、更高效率、稳定地做出规模化的精密加工产品。是①材料一致性、②生产和装配等工艺过程的稳定&可复制性、③检测与溯源完备性、④成本控制多个方面的综合考量和突破。
图、谐波减速器生产流程
(资料来源:绿的谐波招股说明书)
【发展历程】
第一阶段:理论诞生与航天应用(1950s-1960s)
第三阶段:全球普及与国产突破(2000s-至今)
工业机器人爆发式增长,谐波减速器作为其重要核心零部件需求激增。然而,我国此前在谐波减速器领域的技术水平与国外整体差距很大,国内谐波传动产业存在规模偏小、技术落后、产品种类单一、不能与国际产品体系接轨、研究开发人员和投入不足等问题,中高端市场更是一直被日本哈默纳科垄断。
2003年,以绿的谐波为代表的中国企业开始技术攻关,深入研究谐波啮合理论,创新改革生产工艺,自主研发了具备先进水平的精密谐波减速器;2009年制造出第一台原型机;2013年已实现量产并被市场认可,实现了核心零部件的首个国产替代,并逐步跻身全球市场,填补了我国在高端精密谐波减速器领域的空白。
图、谐波减速器产品序列
(资料来源:绿的谐波)

【趋势&市场】
截至目前,谐波减速器在工业机器人和传统工业领域(如半导体制造设备、机床、车载等)中都已成熟和普遍的应用。根据QYResearch预测,2025年传统领域谐波减速器需求预计为225万台、增长10%,到2030年传统领域谐波减速器预计需求337万台,年复合增长8-10%,相对稳健。
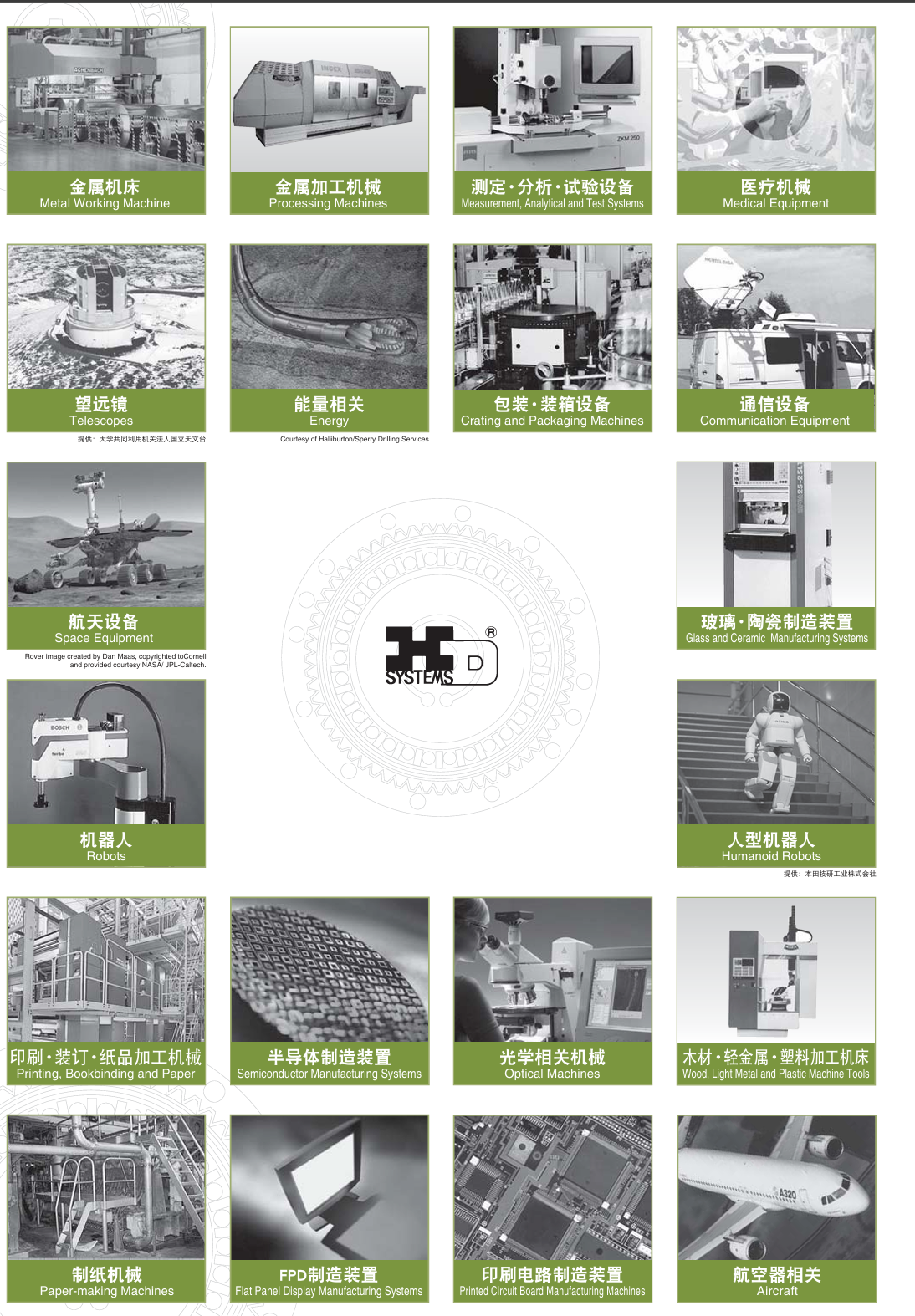
图、谐波减速器应用场景
(资料来源:哈默纳科)
与此同时,人形机器人正进入产业化落地阶段,海内外巨头及企业纷纷布局或入局人形机器人/具身智能赛道,推动其产业链快速发展。其中,谐波减速器作为人形机器人关节的核心部件也迎来高速增长。
以特斯拉人形机器人Optimus为例,全身28个旋转执行器中,14个采用谐波减速器,国内企业人形机器人目前平均用谐波减速器数量为3-6台,未来有增长空间。
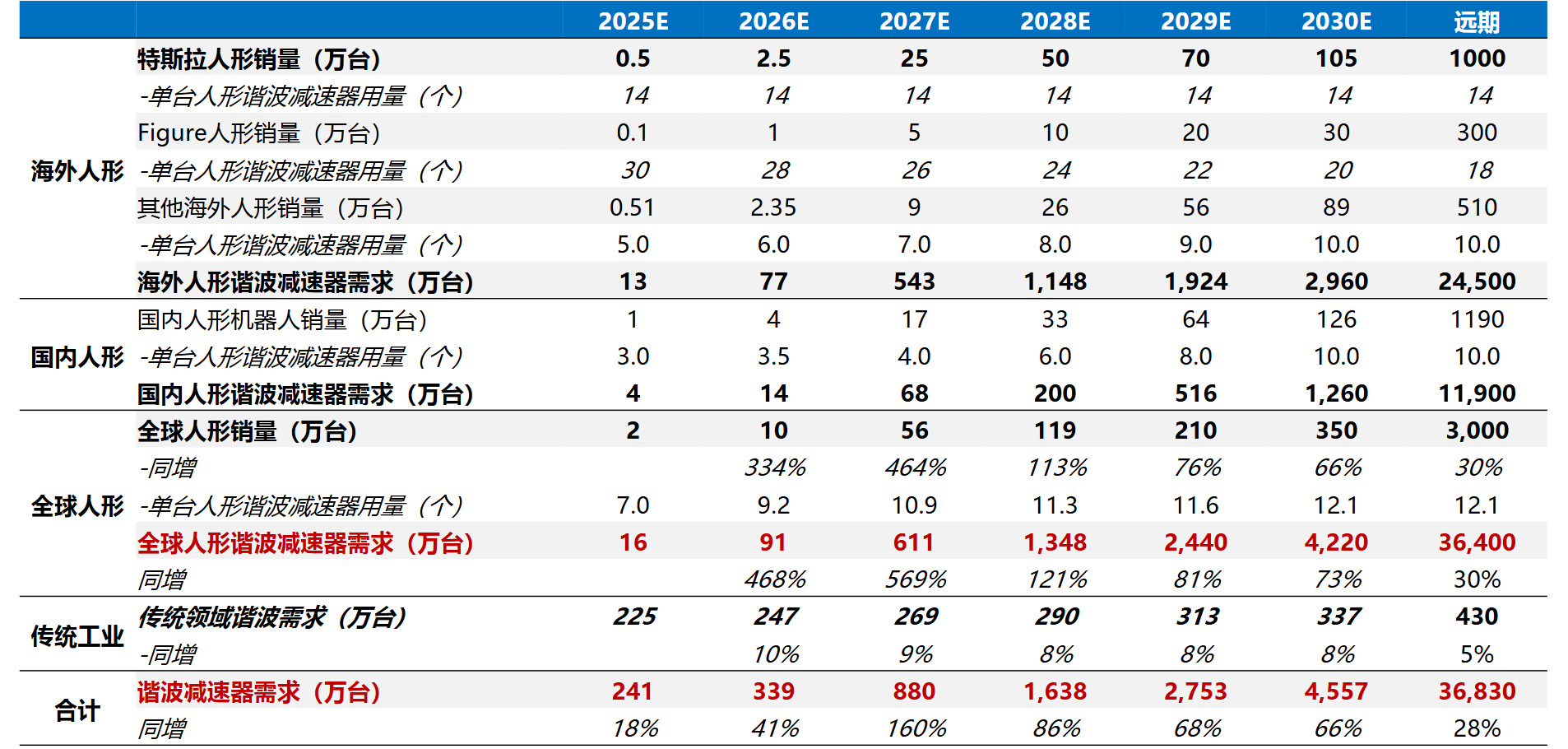
根据东吴证券测算数据,预计25、26、27年全球人形销量分别为2、10、50+万台,对应谐波需求16和91万、600万台;2030年全球人形销量350万台,单台人形谐波用量10台,对应谐波空间超4,200万台。
图、谐波减速器需求测算
点击图片可放大
(资料来源:东吴证券)
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
