

移动方式的本质:不是“轮子 vs 腿”,而是系统设计问题
在具身智能快速发展的当下,人形机器人正逐渐从实验室走向真实应用场景。而在所有技术模块中,移动方式往往是最直观、也最容易引发讨论的一环。
轮式底盘、双足行走、以及近年来出现的混合结构(轮腿、可切换形态)——看似是三种不同路线的竞争,但如果从工程角度来看,这并不是一个简单的形态选择问题。
更准确地说,这是一个系统设计问题。
移动方式的选择,本质上决定了整台人形机器人的底层架构,包括:
-
控制系统复杂度
-
感知与定位方式
-
能耗与续航能力
-
系统稳定性与可维护性
也就是说,一旦选择了某一种移动方案,几乎等于在一开始就锁定了整套技术路径。
因此,与其讨论“哪种更先进”,不如回到一个更本质的问题:
不同移动方式,在系统层面到底意味着什么?
三种移动方案的系统结构差异
如果从系统组成的角度拆解,人形机器人底盘可以被视为一个运动系统平台。不同移动方式,其核心差异主要体现在驱动结构、控制复杂度与感知依赖三个维度。
轮式底盘:低自由度、高确定性的工程方案
轮式底盘是当前最成熟的机器人底盘形态之一,其核心特征在于低自由度与高可控性。
在典型的轮式系统中,移动能力主要由以下模块构成:
-
驱动系统(差速驱动、全向轮或轮毂电机)
-
运动控制系统(速度控制、路径跟踪)
-
感知与导航系统(以SLAM为核心的定位与建图)
由于运动约束明确(主要在二维平面内运动),系统的控制问题可以被大幅简化。这使得轮式底盘能够实现高度稳定且可预测的运动表现。
更重要的是,经过多年的产业发展,轮式底盘已经形成了成熟的技术栈。从算法到硬件,从接口到系统集成,都具备较高的标准化程度。这也是为什么在当前阶段,绝大多数可落地的具身智能应用,仍然建立在轮式底盘之上。
双足行走:高自由度与全身控制的复杂系统
相比之下,双足人形机器人则代表了完全不同的系统设计思路。
一个典型的双足系统,通常包含多个高自由度关节,需要通过复杂的全身控制算法,实现动态平衡与步态规划。其核心挑战在于:
-
非线性动力学建模
-
实时动态稳定控制(如ZMP、MPC等)
-
多传感器融合(IMU、视觉、力反馈)
-
高精度执行与反馈闭环
在这种架构下,移动不再是一个路径跟随问题,而是一个持续变化的动态控制问题。
这也意味着,双足系统在理论上具备更强的环境适应能力(如跨越障碍、上下楼梯),但在工程实现上,其复杂度和不确定性也显著提高。
混合方案:能力叠加还是复杂度叠加?
近年来,一些厂商开始探索混合移动方案,例如轮腿结构、可切换行走模式等,试图结合轮式与双足的优势。
从系统架构角度来看,这类方案的本质是:在同一平台上叠加两套运动系统。
这带来了一个关键问题——控制系统的复杂度并不是线性增长,而往往是指数级上升。系统需要在不同运动模式之间进行切换,同时保证稳定性与连续性,这对控制算法与硬件协同提出了极高要求。
因此,混合方案在理论上具有吸引力,但在实际工程中,往往需要在能力与可控性之间做出权衡。
控制复杂度与稳定性:一个被忽视的核心关系
在评估不同移动方式时,一个常被忽略但极其关键的因素是控制复杂度与系统稳定性之间的关系。
可以用一个简单的工程直觉来理解:
-
系统自由度越高→控制难度越大
-
控制难度越大→系统稳定性越难保障
轮式底盘由于自由度较低,其控制系统可以做到高度确定性,问题空间相对收敛。而双足系统则需要在高维状态空间中实时求解最优解,对算法与计算能力要求极高。
这也是为什么在很多实际应用中,轮式底盘可以实现长时间稳定运行,而双足系统仍然需要大量调参与环境约束。
对于希望将人形机器人真正投入生产环境的企业而言,这种差异往往直接决定了项目的成败。
能耗与效率:被低估的工程约束
在讨论移动方式时,能耗往往不是最显眼的话题,但却是影响实际应用的关键因素之一。
从物理层面来看,轮式运动依赖滚动摩擦,其能量损耗远低于双足行走中的反复抬腿与落地过程。因此,在相同任务条件下:
-
轮式底盘通常具备更长的续航能力
-
双足系统则需要更高的能量输入来维持动态平衡
这不仅影响设备运行时间,也会影响整机的热管理、电池设计以及维护成本。
对于需要长时间运行的应用场景(如物流、巡检、服务机器人),能耗往往直接关系到商业可行性。
工程成本拆解:不只是硬件问题
移动方式的选择,还会直接影响整体项目的成本结构。
从工程实践来看,成本主要来自三个方面:
1. 硬件成本:双足系统需要大量高性能关节、电机与传感器,成本显著高于轮式底盘。
2. 算法成本:双足控制涉及复杂的动力学与实时优化问题,需要更高水平的算法团队支持。
3. 运维成本:系统越复杂,调试与维护难度越高,长期运营成本也随之增加。
相比之下,成熟的机器人底盘,尤其是标准化的轮式底盘,能够在这三方面显著降低整体投入。这也是为什么越来越多企业开始将“移动能力”外包或模块化,而不是完全自研。
为什么行业在当下更倾向于轮式底盘
从工程实现的角度来看,当前阶段人形机器人的落地路径,正在明显向轮式底盘倾斜。这并不是对双足方案的否定,而是基于系统复杂度、开发效率与商业可行性的理性选择。
对于一套完整的具身智能系统来说,移动能力本身不应该占据过多开发资源。如果采用双足方案,团队往往需要投入大量精力在步态控制、动态平衡与全身协同上,导致真正有价值的上层能力——如操作、交互与任务执行——被严重挤占。
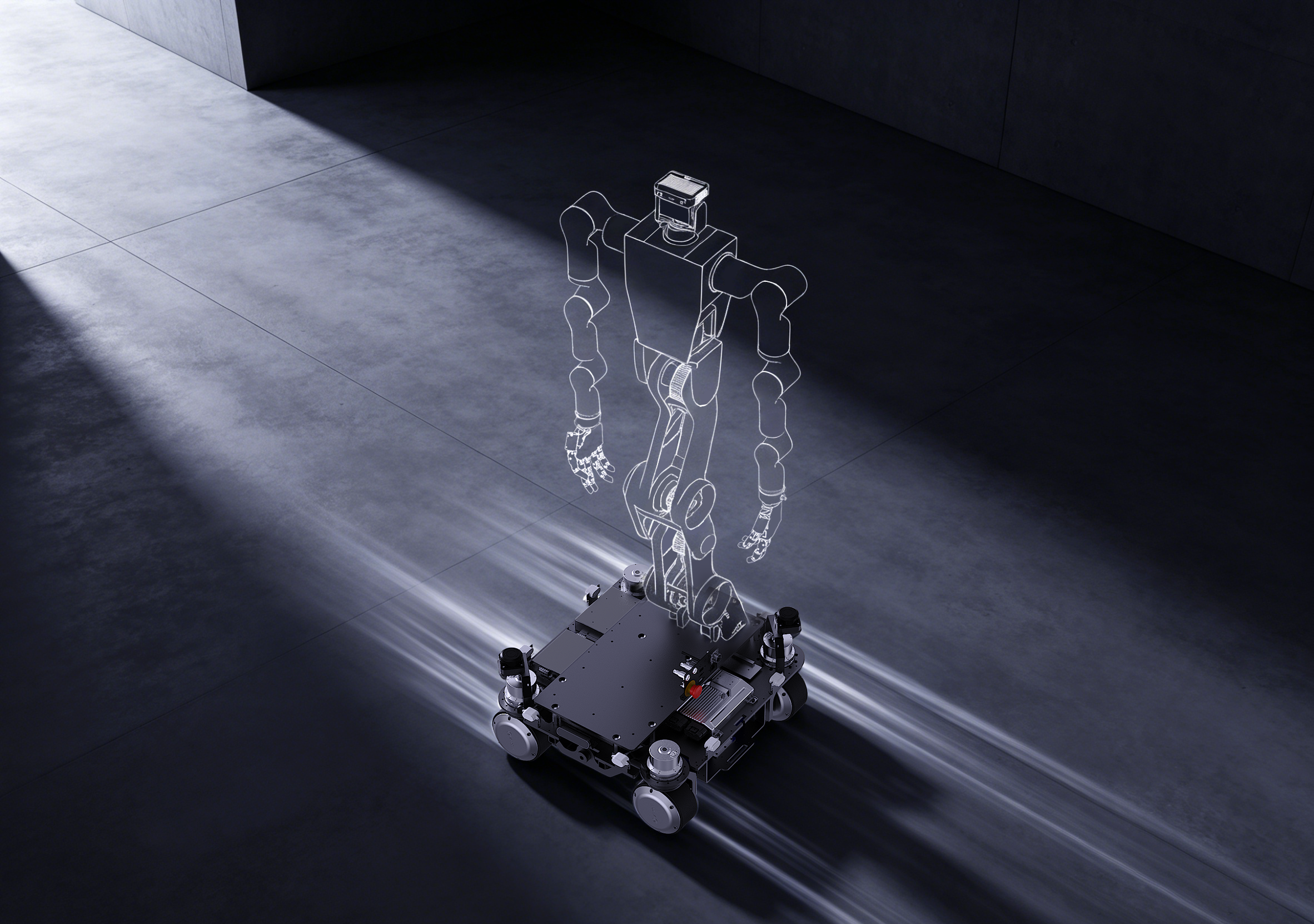
轮式底盘的核心价值,在于将移动能力工程化、模块化,让整机系统实现清晰分层:底盘负责稳定移动,上半身专注具身智能。这种架构更符合当前产业阶段的现实需求。在这一趋势下,底盘也从机械部件演变为完整移动平台。以思岚科技的具身智能机器人底盘为例,其设计思路非常典型:
它直接提供成熟的SLAM与运动导航能力,使机器人在复杂环境中的定位与路径规划无需从零开发;同时,其开发接口已经经过上千家客户项目验证,在稳定性与兼容性上具备工程级可靠性;此外,系统支持多层级接口调用,既可以快速集成使用,也支持深度定制开发。
对于工程团队来说,这意味着可以跳过底层基础设施的重复建设,把资源集中在更具差异化的部分,例如人形上半身能力、操作策略与场景落地。与此同时,轮式底盘在稳定性、能耗与维护成本方面也具备明显优势。其运动控制模型更简单,运行更可靠,尤其适用于当前绝大多数以平整地面为主的应用场景。这些因素共同决定了,轮式方案能够更快进入实际生产与商业环境。因此,从工程与产业的双重视角来看,轮式底盘并非“过渡方案”,而是在具身智能发展早期阶段,一条更现实、更高效的落地路径。

结论:不同路径,对应不同阶段
轮式、双足与混合方案,并不存在绝对的优劣之分,它们更多代表了人形机器人发展的不同阶段。
-
轮式底盘:强调工程落地与规模化应用
-
混合方案:探索能力边界与结构创新
-
双足行走:代表未来更高自由度的形态
从当前产业进程来看,具身智能正处于从技术验证走向应用落地的关键阶段。在这一阶段,系统的稳定性与可复制性,往往比形态的先进性更为重要。
因此,理解不同移动方式背后的系统逻辑,不仅有助于技术路线的选择,也有助于在快速变化的行业中,找到更具确定性的方向。而在人形机器人真正大规模进入现实世界之前,机器人底盘,尤其是成熟的轮式底盘,很可能仍将是支撑这一进程的关键基础设施。
源自:思岚科技
END
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐:
拟邀企业类型:
报名链接
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
