

近日,光轮智能与舞肌科技达成战略合作。双方将围绕人类数据与仿真评测展开深度协同,共同推进物理AI数据与评测基础设施建设。
人类操作数据,是机器人学习的核心“教材”。当前行业的采集体系仍较为碎片化:头环、灵巧手、触觉手套等硬件方案各自演进,数据格式、坐标系与校准方式也缺乏共识,导致采集成果难以横向比对,也难以跨团队复用。物理 AI 亟需一套统一、开放、可对齐的人类数据采集底座。
光轮智能正在打造一个开放的人类数据采集平台(Human Data Capture Platform,HDCP),联合头显、灵巧手、触觉手套、传感器、计算平台等领域的全球领先厂商,共同构建数据采集标准、接口规范与质量体系,推动人类数据采集从项目制走向产业级生产。
灵巧操作,是机器人能力体系中最具挑战的一环,也是当前产业最为稀缺的能力。舞肌科技长期专注于高性能仿生灵巧手、人类数据采集系统、触觉与环境信息感知,主张通过迭代硬件提高数采精度。其旗舰产品 Wuji Hand 和 Wuji Glove 已进入多家头部具身智能团队,成为具身智能赛道核心硬件供应商。
共建开放的人类数据采集标准平台
此次与舞肌科技的合作,是光轮智能开放生态建设中的重要一环。光轮智能在全球范围内已积累了大规模、跨场景、跨硬件的人类操作数据生产经验,建立了从采集、清洗到标注、对齐的完整链路;舞肌科技则在灵巧手本体设计、触觉手套与手部操作建模等方向具备扎实的工程积累,对灵巧操作的数据形态与质量要求有第一线的理解。双方能力的互补,使得这次合作不止停留在数据采集层面,而是延伸至“采集硬件—数据规范—模型可用性”的整条链路。
在此基础上,双方将共同制定下一代人类数据采集标准(Human Data Capture Standard),重点覆盖灵巧手动作、触觉反馈、力控信号、多模态时序对齐等关键采集环节,并围绕该标准沉淀配套的硬件接入规范、数据格式约定、质量评估方法与基准采集流程,形成可被行业复用的标准化能力。
共建灵巧操作 Real2Sim 与 Sim2Real 闭环
灵巧操作涉及接触、摩擦、力控与触觉反馈,是机器人最具挑战性的能力之一,也是实现通用具身智能的重要基础。
作为国际开源GPU加速物理引擎 Newton 技术指导委员会(TSC)成员,光轮智能正积极参与下一代机器人物理引擎与灵巧操作生态建设。此次合作中,双方将基于 Newton 共同推进舞肌科技灵巧手与触觉系统的标准化仿真适配、物理建模与开源生态集成,推动硬件、数据、模型与仿真环境之间的互联互通,降低灵巧操作研发门槛,加速行业生态发展。
同时,双方将结合光轮智能 SimReady Foundry、RoboFinals 等平台能力,以及舞肌科技在灵巧手、触觉系统与操作模型方面的技术积累,共同探索真实操作经验向仿真环境迁移(Real2Sim),以及仿真能力向真实机器人部署(Sim2Real)的持续闭环,推动灵巧操作能力的规模化学习、评测与迭代,加速机器人在复杂操作场景中的落地应用。
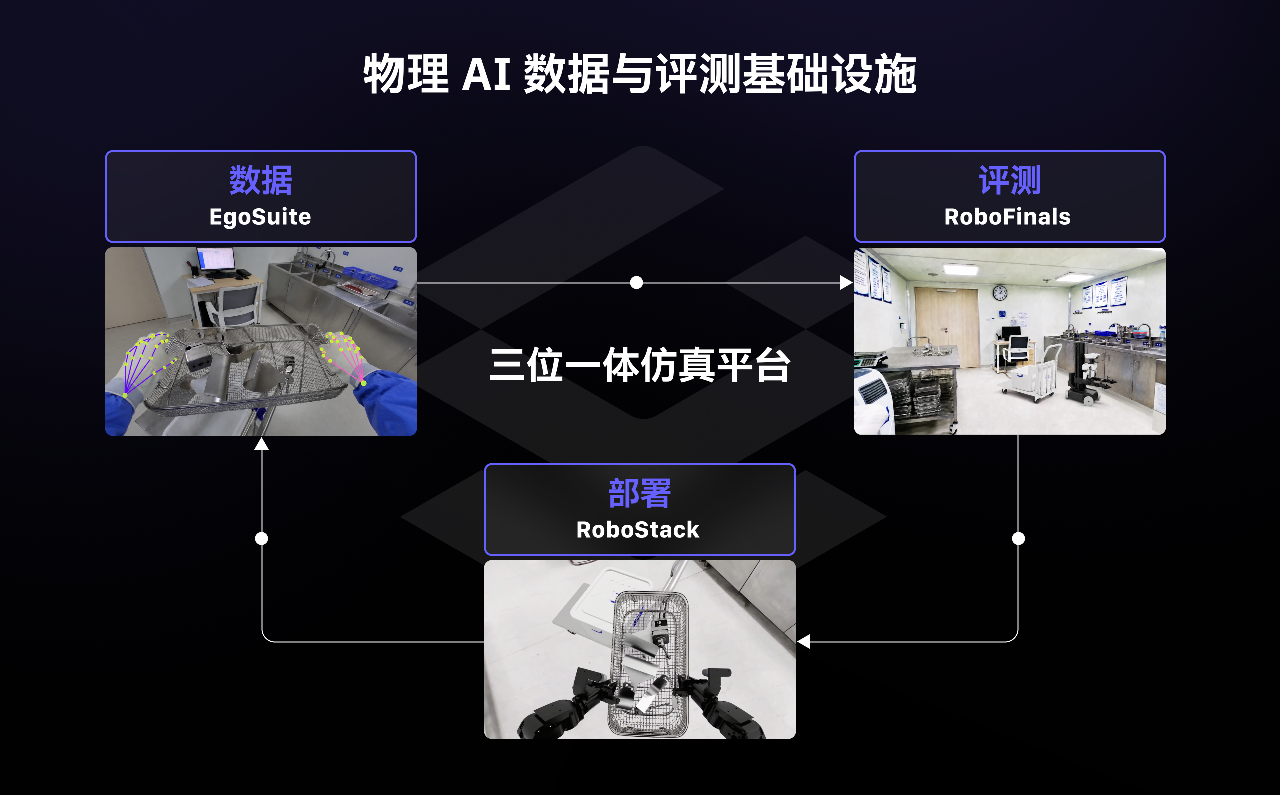
图:光轮智能“数据—评测—部署”闭环
光轮智能与舞肌科技的合作,不仅是物理AI数据于评测基础设施公司与硬件公司的合作,更是一次面向物理AI持续学习系统的联合探索。未来,双方将共同推动开放的人类数据标准、物理对齐的仿真评测体系以及部署反馈闭环建设,加速机器人走向真实世界。
后续,光轮智能也将向更多硬件厂商、模型团队与机器人公司开放生态,让产业各方能够基于统一标准开展数据生产与机器人学习,推动人类数据采集从分散建设走向协同共建。
▌关于光轮智能
光轮智能致力于为物理 AI 构建数据与仿真基础设施,依托首创“求解—测量—生成”三位一体全栈自研仿真平台,提供高质量、规模化的仿真合成数据、工业级仿真评测、人类视频数据。作为全球首个具身数据独角兽,全球前五的世界模型团队均与光轮合作,在仿真合成数据、仿真评测、和人类视频数据共三个关键领域实现全球交付第一。
▌关于舞肌科技
舞肌科技专注于高性能仿生灵巧手、高精度人类数据采集设备、真机遥操一体设备研发。公司主力产品 Wuji Hand 1 已成为多家具身智能公司的模型验证+后训练首选灵巧手。最新产品 Wuji Hand 2 已成为全球多家模型团队求购的末端执行器。Wuji Glove 作为全球首个融合了EMF空间位姿传感器和触觉传感器的产品,深受数据采集行业欢迎。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
