

01
内容概览
9月10日,上海科技大学生物医学工程学院于游课题组和合作者在《科学进展》(Science Advances)上发表标题为“Printed sensing human-machine interface with individualized adaptive machine learning”的研究论文,报道了一种3D打印技术制备的多模态传感柔性生物电子,结合个体间自适应的机器学习算法,打通了从控制、手势识别到机器人触觉感知反馈的交互路径,并且进一步在智能假肢方面展现出巨大的应用潜力。
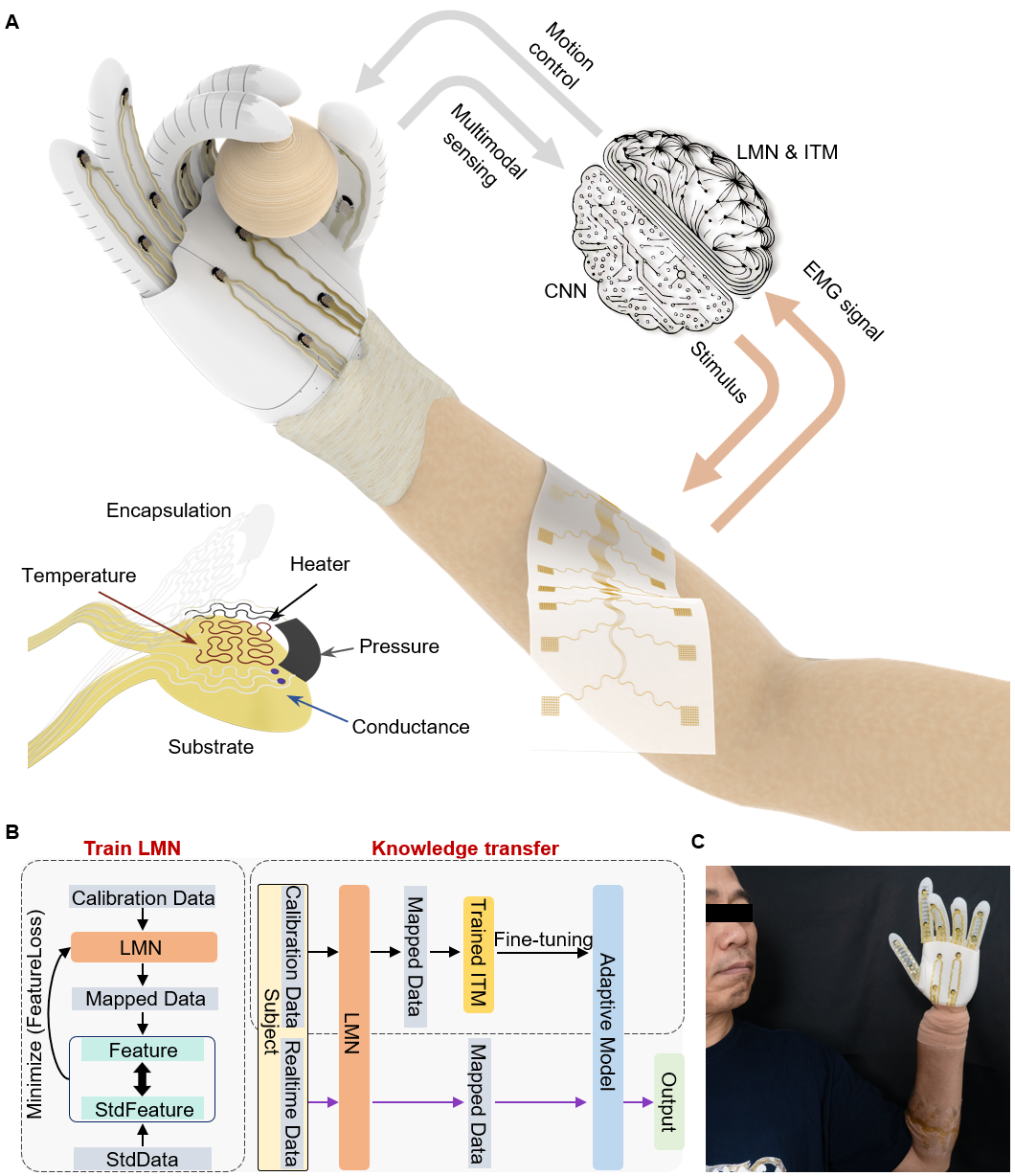
在本研究中,作者介绍了一种打印的柔性人机界面,该界面由具备电子皮肤的手势识别系统和具备多模态感知能力的柔性机器人组成,能够感知接触压力、温度、热导率和电导率。具备自适应机器学习的感知电子皮肤能够解码和分类手势,同时具备可重复佩戴的便利性和个体差异。该柔性界面实现了机器人与人体之间的双向通信,形成闭环。这项工作有望大幅提升机器人的智能水平,并为更实际的应用铺平道路。
02
柔性电子皮肤
2.2 人机界面领域
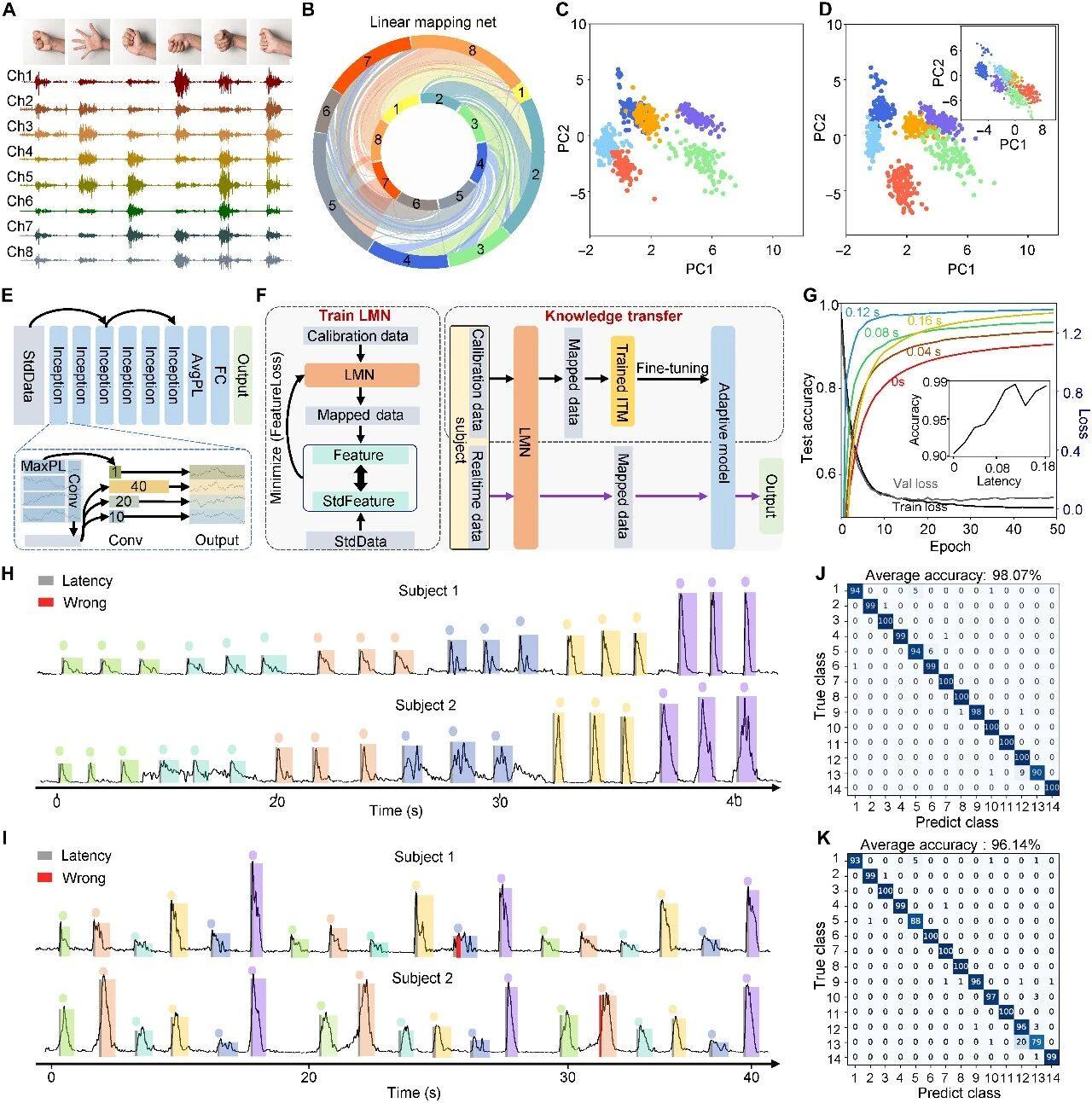
高精度、快响应和广泛个体适应性是人机界面的关键。采用深度神经网络分类基于 SEMG 的手势,针对个体差异和电极放置不一致导致的信号变异,提出含线性映射网络(LMN)和知识迁移策略的自适应模型。LMN 调整八通道信号权重,将新受试者信号映射到标准化数据集分布。
2.3 针对表面肌电图(sEMG)数据分析的个体自适应机器学习模型
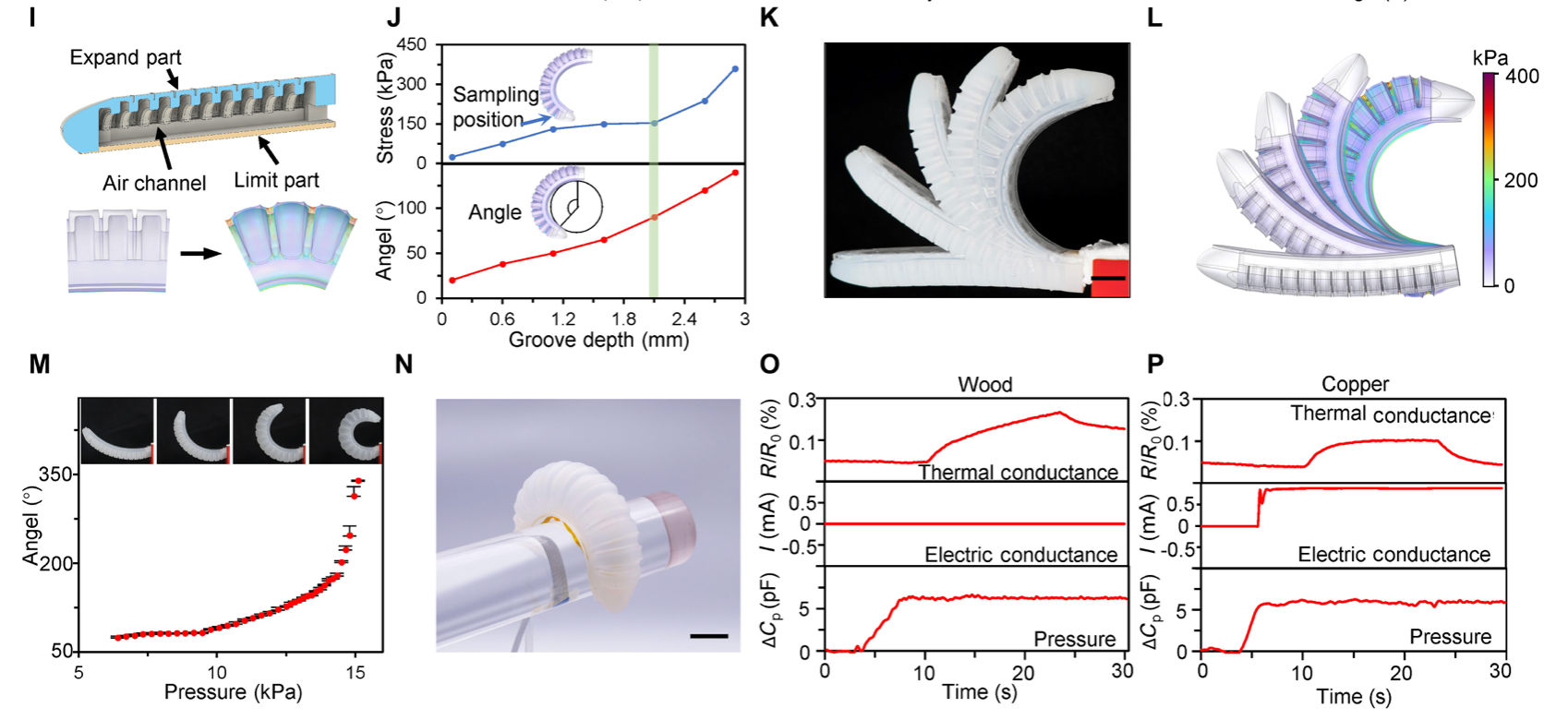
传感器阵列含温度、压力、电导传感器和电加热器,通过多种墨水依次印刷制成,波浪结构设计具备拉伸能力。温度传感器为电阻温度计,在 25-55°C范围内电阻线性变化;与碳加热器结合,利用热传导差异可识别材料。
电容式压力传感器由含气泡的 PDMS/碳层和 PVDF/离子液体层组成,PVDF 与离子液体比例 1:1.5时灵敏度达 10.5pF/kPa,2000 次循环实验证明其稳定性。电导传感器通过电极间电压和电流测量物体电导,PEDOT:PSS 水凝胶的高导电性和高长径比保障接触充分。
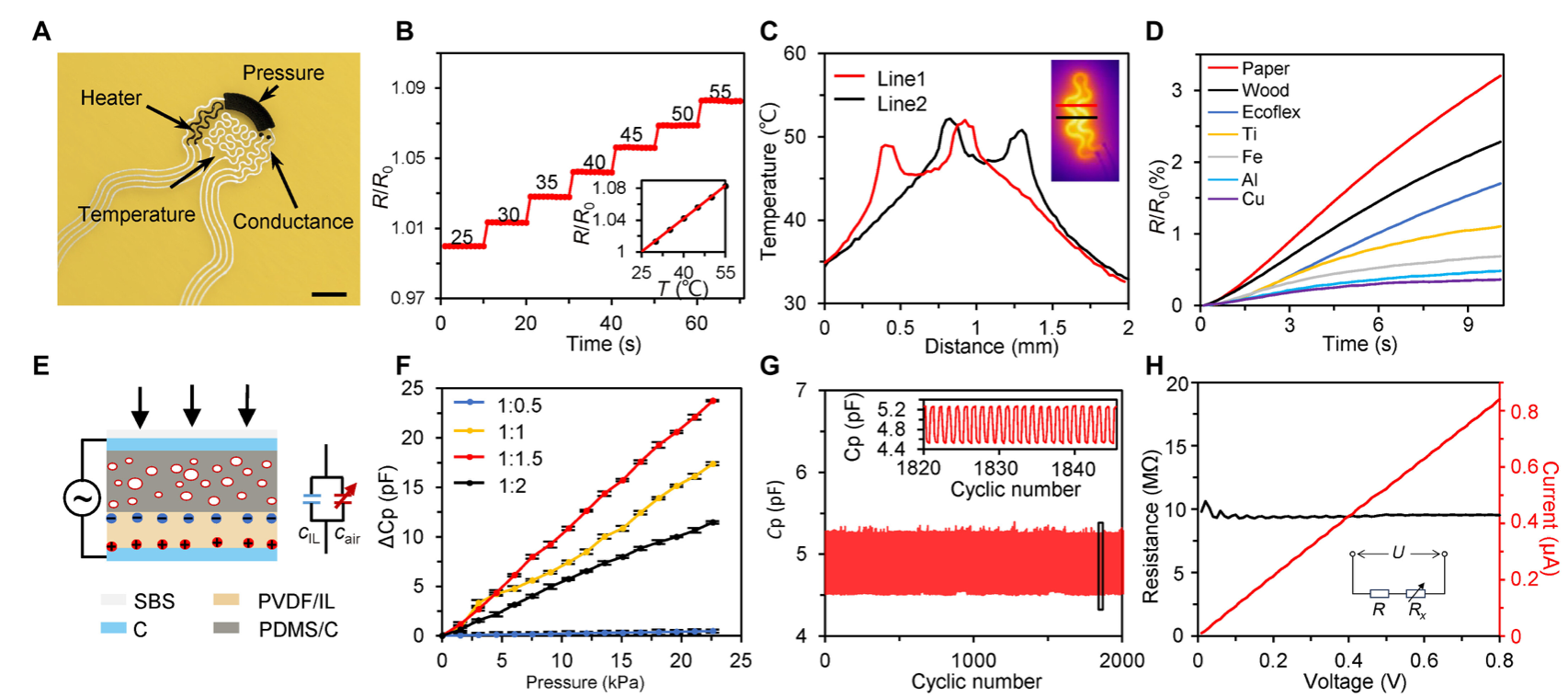
软机器人手指采用弹性气囊结构,顶部扩展部分为 Ecoflex 弹性体,底部限制层为 PDMS,材料杨氏模量差异使其充气时产生弯曲。模拟分析显示,2.1mm槽深在相同压力下可实现大弯曲角度且应力较低,实际弯曲与模拟结果吻合,低压力时弯曲角度与压力线性相关,3kPa左右快速接近360°,5000 次操作仍保持稳定。集成多模态传感器阵列的手指可抓取柱状物体并感知其特性,如木材和铜的压力、电导和温度响应存在显著差异。
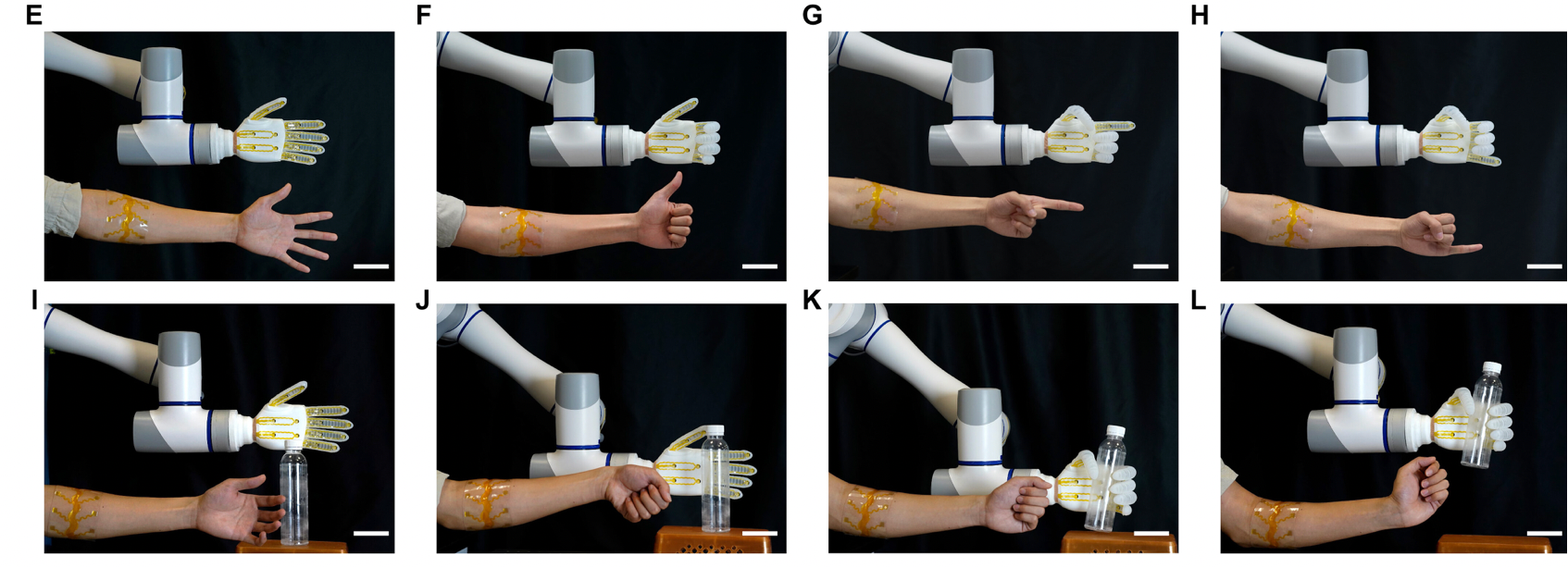
本研究通过集成多模态传感系统与软体执行器,构建了具备触觉感知能力的仿生机械手系统。实验重点验证了基于电子皮肤的手势识别功能,采用自适应机器学习算法成功实现了对不同个体手势动作的解码与分类,准确率达到98.63%。
实验结果表明,该电子皮肤实现了具有触觉感知和双向交互能力的机器人平台。其最大技术突破在于将电子皮肤的感知功能与机器人的执行能力深度融合,通过自适应机器学习算法解决了个体差异性与重复佩戴问题。该系统在远程操控、人机协作和物体识别等场景展现出应用潜力,其14.04瓦的低功耗特性为实际部署提供了能效基础。这项技术推动了电子皮肤从单一传感向智能交互的演进,为下一代具身智能机器人提供了关键技术支撑。
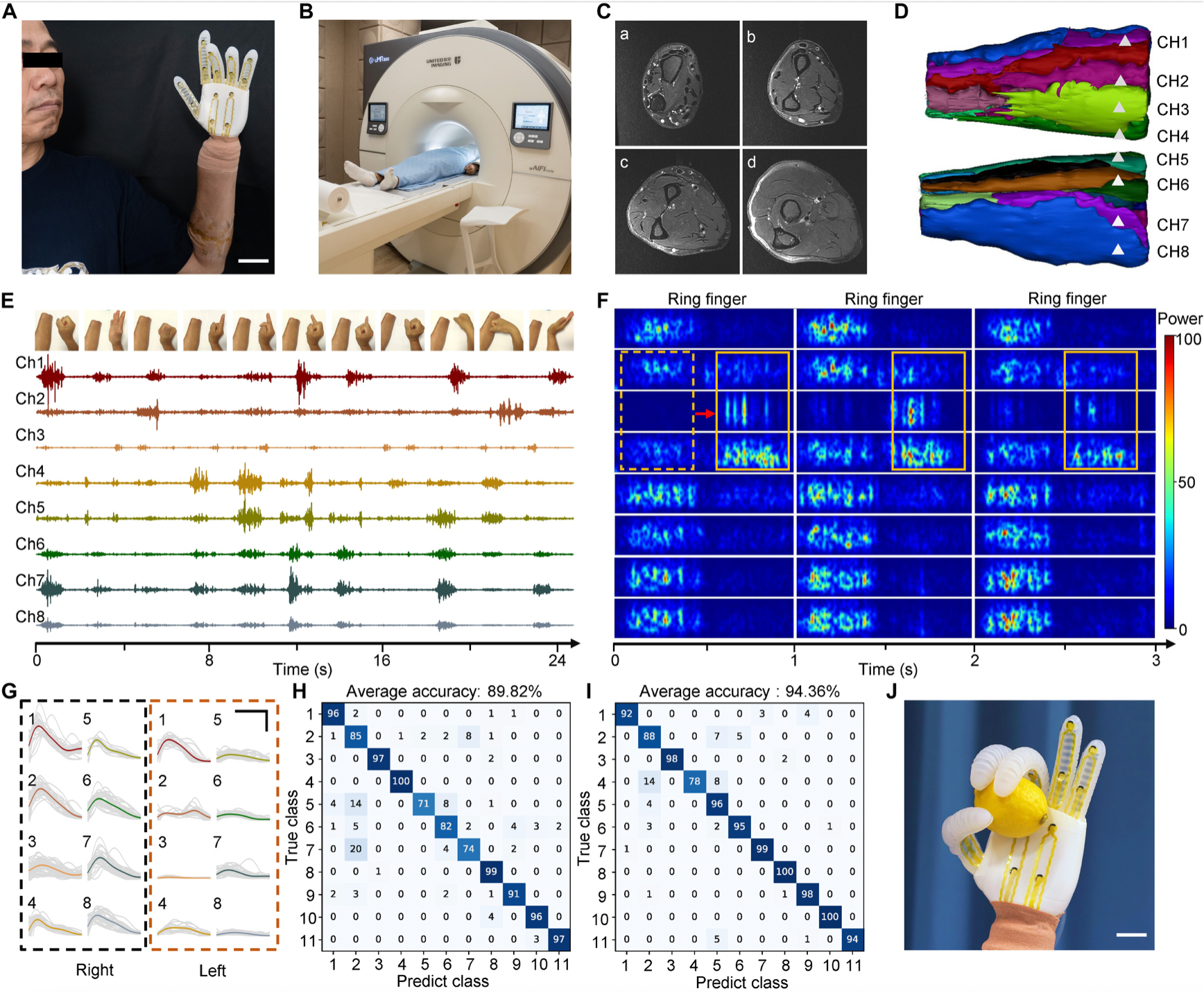
实验中,一位左臂截肢者佩戴 e-skin 和传感机器人作为假肢,MRI 显示其残肢肌肉结构完整但存在广泛水肿。基于 MRI数据重建的模型用于确定八通道 SEMG 电极位置。截肢者同时用残肢和健康手做 11种动作,残肢 SEMG 信号存在时间延迟和强度降低(平均低 40%),这与神经肌肉结构损伤后的代偿有关。
尽管信号存在延迟和减弱,自适应机器学习仍能有效识别手势:50次重复时准确率 94.36%,5次重复时 89.82%。该系统帮助截肢者完成控制任务和刺激反馈,实现假肢的辅助抓取和感知功能。
03
结论
整理自:Science Advances及网络文章

为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐1:
活动推荐2:
电子皮肤产业应用发展论坛(11月27日 苏州)
报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com

扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名:
https://www.aibang360.com/m/100268?ref=172672
点击阅读原文,即可报名
报名方式
报名方式
报名方式
方式1:请加微信并发名片报名
电话:艾果果 13312917301(同微信)
邮箱:Ab008@aibang.com
扫码添加微信,咨询会议详情
注意:每位参会者均需提供信息
方式2:长按二维码扫码在线登记报名
或者复制网址到浏览器后,微信注册报名:
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
