
01|三维建模
关节型机器人腕部设计
包含:设计说明书 ;图纸;三维模型;
摘要
工业机器人是20世纪最重要的自动化技术发明。它改变了传统的生产方式,促进了工业的产业升级,给世界经济的蓬勃发展带来不可估量的贡献。作为一种自动化装备,工业机器人集成了机械、电子、计算机、传感器、人工智能、自动控制、通讯技术、仿生学、图像处理等多种先进技术于一体。基于此,本课题以关节型机器人腕部设计题,在收集整理相关文献资料的基础上,首先,对关节型机器人的结构原理及相关参数进行了分析。然后,结实际情况,对关节型机器人的腕部设计要求进行了探讨。最后,结合实际情况,运用所学专业知识,对关节型机器人腕部进行了详细的设计,以期促进关节型机器人的发展。
关键词:关节型机器人;腕部设计;六个自由度
02|目录
1 绪论
1.1 研究背景及意义
1.2 国内外的研究现状
1.3.1 国外工业机器人发展
1.3.2 国内工业机器人发展
2 关节型机器人方案设计
2.1 确定基本技术参数
2.1.1 机械结构类型的选择
2.1.2 额定负载
2.1.3 确定关节型机器人手臂的配置形式
2.2 关节型机器人本体结构设计
3 关节型机器人腰部结构设计
3.1 电动机的选择
3.2 计算传动装置的总传动比和分配各级传动比
3.3 轴的确定
3.4 齿轮的参数
3.5 关节型机器人立柱设计
3.6 关节型机器人基座设计
4 关节型机器人腕部结构设计
4.1 回转部分
4.1.1选择电动机
4.1.2 传动装置的总传动比
4.1.3 分配各级传动比
4.1.4 轴的计算
4.1.5确定齿轮传动的精度
4.1.6 确定齿轮的参数
4.3 摆腕部分
4.3.1 传动装置的总传动比及各级传动比分配
4.3.2 确定三根轴的具体尺寸
4.3.3 确定齿轮的参数
4.3.4 确定齿轮传动的精度
4.4 转腕
4.4.1 传动装置的总传动比及各级传动比分配
4.4.2 齿轮参数
5 结论
参考文献
致 谢
03|设计说明书
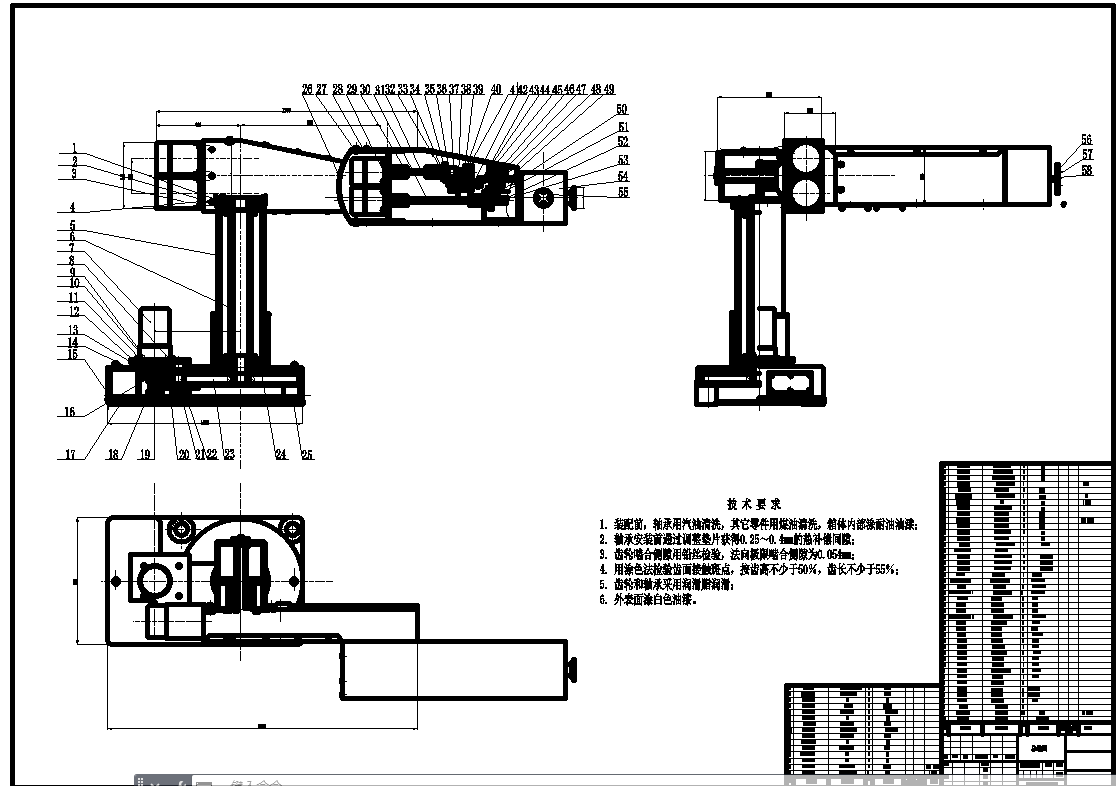
04|CAD图纸
05|关节型机器人本体结构设计
下图是整个机器人本体机械传动系统的简图。机械传动系统共有30个齿轮,为了实现在同一平面改变传递方向90°,有10个齿轮为圆锥齿轮,有利于简化系统运动方程式的结构形式。如果采用蜗轮蜗杆结构,则必然以空间交叉方式变向,就不利于简化系统运动方程式的结构形式。
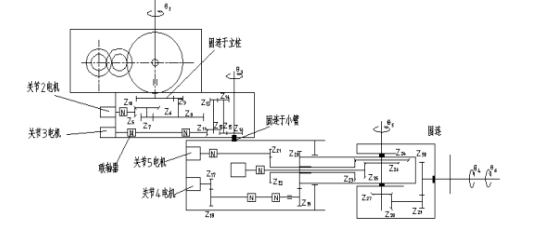
机器人主要由立柱与基座组成的回转基座以及大臂、小臂、手腕组成。
基座是一个铝制的整体铸件,其上装有关节1的驱动电机,在基座内安置了关节1的回转轴及其轴承、轴承座等。
大臂和小臂的结构形式相似,都由内部铝制的整体铸件骨架与外表面很薄的铝板壳相互胶接而成。内部铸件既作臂的承力骨架,又作内部齿轮组的轮壳与轴的支承座。
大臂上装有关节2,3的驱动电机,内部装有对应的传动齿轮组。关节2,3都采用了三级齿轮减速,其中第一级采用锥齿轮,以改变传动方向90°。第二、三级均采用圆柱直齿轮进行减速。关节2传动的最末一个大齿轮固定在立柱上;关节3传动的最末一个大齿轮固定在小臂上。

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
