

本文约7,949字,建议收藏阅读
作者 | 北湾南巷
出品 | 汽车电子与软件
域控制器(Domain Controller)技术最早在汽车电子架构升级过程中得到广泛应用。随着电动化、智能化和网联化浪潮的到来,传统汽车采用的分布式电子控制单元(ECU)架构逐渐暴露出系统复杂度高、线束冗余、算力分散、软件迭代困难等问题。为应对这些挑战,汽车电子电气架构开始向集中化、域化方向演进,域控制器由此成为智能汽车架构中的核心组件。
在汽车行业完成初步验证后,域控制器这一“集中算力 + 功能整合 + 软件定义”的技术范式,正在跨越行业边界,被引入到人形机器人这一全新领域。人形机器人作为高度复杂的机电系统,集成了感知、决策、运动控制和人机交互等多种功能,其系统规模、实时性要求和协同复杂度,甚至在某些维度上超过了智能汽车。

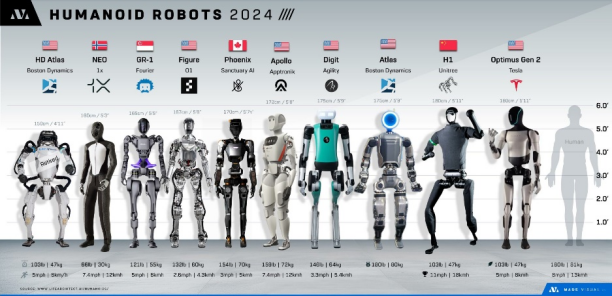
2024年被业界普遍称为人形机器人商业化元年。经过一年多的技术演进与产品落地探索,人形机器人在整机结构、驱动执行器、感知系统以及大模型驱动的智能控制等方面均取得了显著进展。与此同时,控制系统架构如何设计,逐渐成为制约人形机器人规模化应用的关键问题之一。
在这一背景下,域控制器技术凭借其在汽车行业积累的成熟经验,成为人形机器人控制系统架构的重要参考方向。
目 录:
1. 域控制器的技术起源与演进
2. 汽车行业的域控制器架构
3. 人形机器人的域控制器架构
4. 汽车与人形机器人域控制器的对比分析
5. 小结

一、域控制器的技术起源与演进
1.1 电子电气架构的发展历程
在汽车电子化发展的早期阶段,整车电子电气架构普遍采用分布式设计模式。在这种架构下,车辆的每一项功能几乎都由一个独立的电子控制单元(ECU)来实现,例如发动机控制 ECU、制动控制 ECU、车窗控制 ECU 等。各 ECU 通过 CAN、LIN 等总线进行通信,形成一个松散耦合的控制网络。
这种分布式 ECU 架构在汽车电子化初期具有明显优势:
-
功能边界清晰,模块之间相互独立
-
开发难度相对较低,便于分工协作
-
单个 ECU 出现问题时,影响范围有限
因此,在燃油车时代以及汽车电子功能相对简单的阶段,该架构长期占据主导地位。
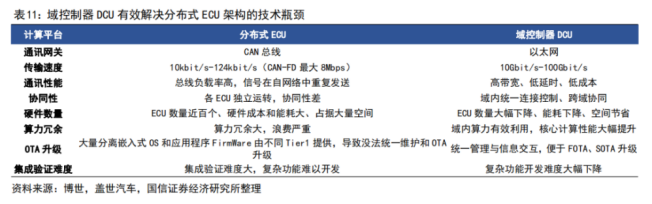
然而,随着汽车功能的不断丰富,这种架构的局限性逐渐显现。进入智能化阶段后,车辆需要支持的功能数量和复杂度急剧提升,包括高级驾驶辅助系统(ADAS)、智能座舱、车联网以及多种主动安全功能。一辆现代中高端车型中,ECU 的数量往往达到 70~100 个以上,部分豪华车型甚至更高。ECU 数量的激增带来了一系列问题:
-
系统复杂度急剧上升:控制逻辑分散在不同 ECU 中,系统整体行为难以统一协调
-
线束成本和重量显著增加:大量 ECU 之间的点对点通信导致线束冗余
-
算力利用率低:各 ECU 算力碎片化,难以支撑高算力算法
-
软件维护与升级困难:跨 ECU 功能修改需要多方协同,开发周期长
在分布式架构逐渐逼近系统复杂度“天花板”的背景下,汽车行业开始探索更加集中、高效的电子电气架构形态。
由此,域集中式架构应运而生。该架构按照功能相似性和实时性要求,将原本分散在多个 ECU 中的功能进行整合,由性能更强大的计算平台统一承担,这一计算平台即被称为域控制器(Domain Controller)。
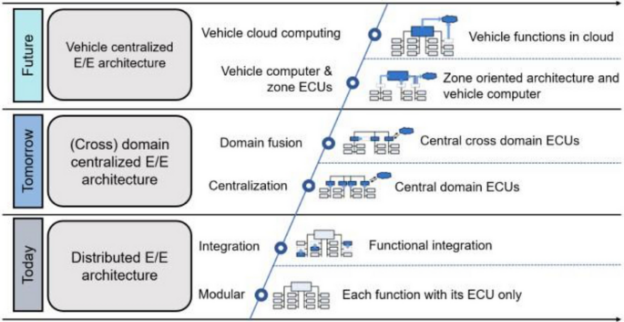
这种演进不仅显著减少了 ECU 数量,也为后续的软件集中管理和功能扩展创造了条件,成为汽车电子电气架构迈向下一阶段的重要里程碑。
1.2 域控制器的核心概念
从技术定义上看,域控制器是指负责控制某一功能域内多项车辆功能的集中式计算单元。与传统 ECU 相比,域控制器并非单一功能控制模块,而是一个高度集成的计算平台。
典型的域控制器通常由三部分构成:
1. 域处理器(硬件平台)
通常采用高性能 MCU、SoC 或异构计算平台,具备更强的 CPU、GPU 或 AI 加速能力,用于承载复杂控制逻辑和算法计算。
2. 操作系统与中间件
域控制器一般运行实时操作系统(RTOS)、Linux,或两者的组合,用于同时满足实时控制和复杂应用的需求,并通过中间件实现资源调度与通信管理。
3. 应用软件与控制算法
包括车辆控制逻辑、感知与融合算法、人机交互应用等,软件在域控制器上集中部署和运行。
与传统 ECU 相比,域控制器具备以下显著特征:
-
计算能力显著提升,可支撑复杂算法和多任务并行
-
接口资源更加丰富,支持多传感器、高速通信
-
功能集成度更高,多个原有 ECU 功能合并运行
-
软件灵活性更强,便于功能升级和跨域协同
从架构演进角度看,域控制器的出现标志着汽车电子电气系统从“以硬件为中心”向“以软件和算力为中心”的转变。这一转变不仅降低了系统复杂度,也为软件定义汽车(SDV)理念的落地提供了基础支撑。
总结来看,域控制器技术正是汽车行业在突破分布式 ECU 架构瓶颈过程中形成的一种关键解决方案。通过功能整合与算力集中,域控制器实现了系统架构的简化、性能的提升以及软件能力的释放,为后续跨领域应用(如人形机器人)奠定了坚实的技术基础。
二、汽车行业的域控制器架构
在域控制器技术的发展过程中,汽车行业率先完成了从概念提出到大规模工程落地的全过程。其中,博世提出的“五域架构”被广泛视为汽车域控制器架构的经典范式,对整车电子电气系统的功能划分、硬件配置和软件设计产生了深远影响。
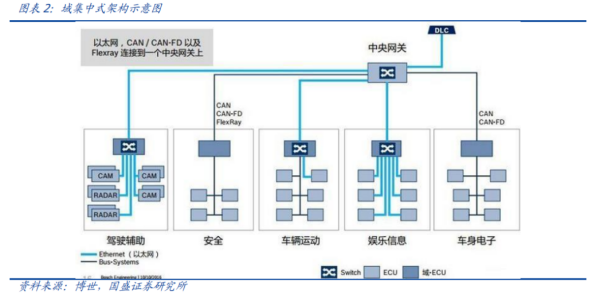
2.1 博世经典五域架构
博世在总结长期汽车电子系统开发经验的基础上,提出将整车电子电气系统按照功能属性和实时性需求划分为五个相对独立的功能域。每一个功能域由对应的域控制器统一管理,从而替代原先分散的多个 ECU。这五个功能域分别为:动力域、底盘域、座舱域、自动驾驶域和车身域。
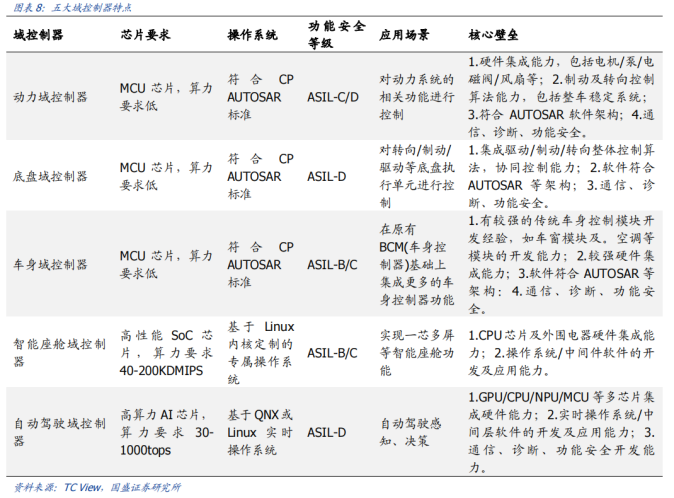
2.2 汽车域控制器的技术特点
从工程实现角度来看,汽车域控制器普遍具备以下几个关键技术特征:
1. 异构计算架构域
控制器通常采用多核 CPU、GPU 以及专用加速单元(如 AI 加速器)组成的异构芯片架构,以同时满足实时控制和复杂计算需求。
2. 通信能力持续升级
通信协议从传统的 CAN、LIN 逐步向 FlexRay、车载以太网演进,以支持更高的数据带宽和更低的通信延迟。
3. 多传感器融合能力
特别是在自动驾驶域和底盘域中,需要对来自不同传感器的数据进行高频融合与同步处理。
4. 严格的功能安全设计
所有汽车域控制器必须满足 ISO 26262 功能安全标准,根据不同功能等级达到 ASIL-B 至 ASIL-D 的要求。
5. 支持 OTA 升级能力
域控制器通常具备远程软件升级能力,使车辆功能可以在全生命周期内持续演进。
2.3 从五域到三域的架构演进趋势
随着芯片算力的持续提升和软件架构的成熟,汽车电子电气系统正从五域架构进一步向三域架构演进。这一趋势主要体现为功能和算力的进一步集中:
-
整车控制域:整合原有的动力域、底盘域和车身域
-
智能座舱域:聚焦人机交互与车内体验
-
自动驾驶域:专注高算力智能感知与决策
三域架构的优势在于:
-
减少域控制器数量,降低系统复杂度
-
提高算力利用效率
-
加强跨功能协同能力

这一演进路径清晰地反映出汽车电子架构从“域划分”向“中央计算平台”过渡的趋势。
三、人形机器人的域控制器架构
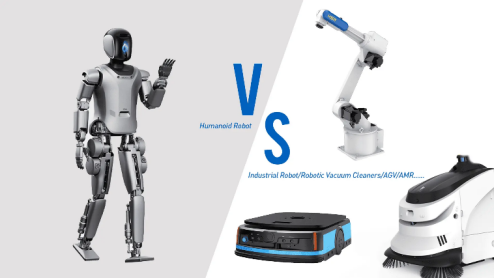
与传统工业机器人或服务机器人相比,人形机器人在结构形态、控制复杂度和智能水平上都提出了更高要求。其控制系统不仅要具备类似汽车电子系统的高可靠性和实时性,还需要同时支持类人认知、复杂运动控制以及人与环境的持续交互。因此,人形机器人天然具备引入域控制器架构的技术基础和现实需求。
3.1 人形机器人控制系统概述
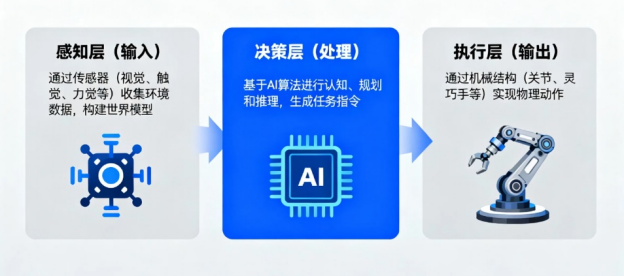
从系统工程角度看,人形机器人是人工智能、机器人学、自动控制、精密制造等多领域深度融合的复杂系统。其整体控制系统通常可划分为三大核心子系统:
-
感知系统:负责获取机器人自身状态和外部环境信息
-
决策系统:负责理解环境、制定任务目标和行为策略
-
执行系统:负责将控制指令转化为实际的物理运动
根据工信部发布的《人形机器人创新发展指导意见》,

人形机器人产业链被形象地划分为三大部分:
-
“大脑”:感知、决策与人机交互
-
“小脑”:运动控制与协调
-
“肢体”:执行机构与机械结构
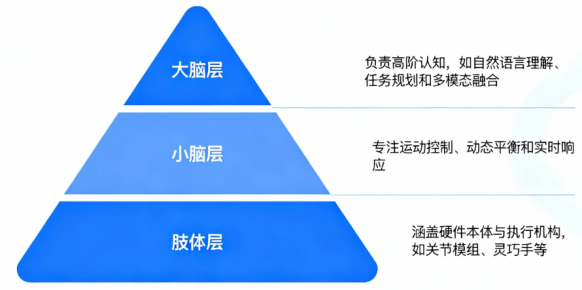
在这一体系中,控制器承担着“大脑”和“小脑”的核心功能,是整个人形机器人系统的“中枢神经”。
随着机器人自由度数量、传感器种类和智能算法复杂度的快速提升,传统分散式控制方式已难以满足需求,人形机器人正在自然演进出类似汽车域控制器的集中式、分层控制架构。
3.2 “大脑”控制器系统
人形机器人的“大脑”控制器主要负责高层次的智能处理任务,其核心目标是让机器人具备对环境的理解能力、对任务的规划能力以及与人类的自然交互能力。从功能上看,“大脑”控制器通常涵盖感知系统、决策系统和人机交互系统三个方面。

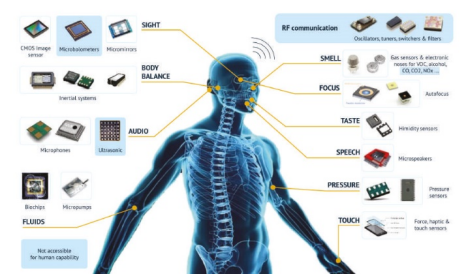
1. 感知系统
感知系统是机器人理解世界的基础,其主要任务是通过多种传感器获取外部环境和自身状态信息。典型的感知输入包括:
-
视觉传感器(RGB、深度摄像头)
-
激光雷达与毫米波雷达
-
惯性测量单元(IMU)
-
力/扭矩传感器与触觉传感器
感知系统需要对多源数据进行实时处理和融合,实现目标识别、空间定位、三维环境建模以及自主导航等功能。这一过程高度依赖图像处理和 AI 推理能力,对算力提出了极高要求。
2. 决策系统
决策系统是“大脑”控制器中技术复杂度最高的部分,其核心目标是将感知信息转化为可执行的行为策略。随着大模型技术的引入,人形机器人决策系统正逐步向更高层次的智能演进,包括:
-
多模态模型建模与语义理解
-
任务分解与任务规划
-
路径规划与行为决策
-
强化学习与持续学习能力
在这一层级,控制器不仅需要具备强大的算力支持,还需要支持复杂的软件框架和模型调度机制,这与汽车自动驾驶域控制器在技术形态上高度相似。
3. 人机交互系统
人机交互系统是人形机器人区别于传统机器人的重要特征之一,其目标是实现自然、直观的交互体验。典型功能包括:
-
语音识别与语音合成
-
手势与姿态识别
-
表情与情绪识别
-
多模态交互融合
这一部分对系统响应速度、交互稳定性和软件生态兼容性要求较高,通常与感知和决策系统共同运行在“大脑”域控制器之上。
3.3 “小脑”控制器系统
如果说“大脑”负责“想什么、做什么”,那么“小脑”则负责“怎么做”。人形机器人的“小脑”控制器专注于运动控制与协调,其设计目标是实现稳定、精确且安全的物理运动。
1. 关节控制
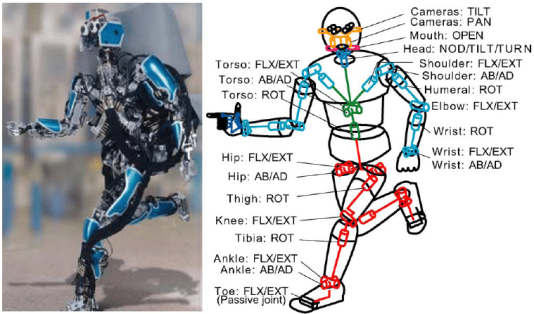
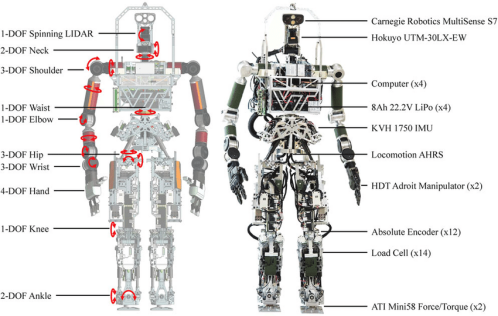
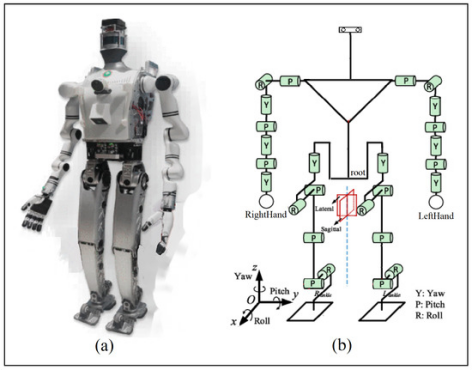
人形机器人通常拥有 30~60 个甚至更多自由度,每一个关节都需要进行独立而精确的控制。关节控制器需要实时调节:
-
关节位置
-
关节速度
-
关节输出力矩
这类控制通常以毫秒甚至亚毫秒级周期运行,对控制器的实时性、确定性和控制精度提出了极高要求。
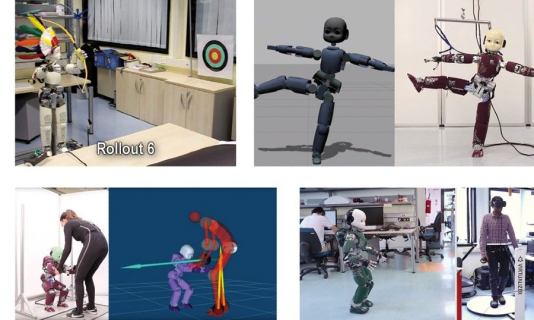
2. 平衡控制
平衡控制是人形机器人区别于轮式或固定式机器人的核心技术之一。机器人需要持续监测自身姿态和外部扰动,通过快速调整多个关节的协同动作来维持稳定,避免跌倒。
这一过程涉及复杂的动力学计算和反馈控制,对系统延迟极其敏感,通常由“小脑”控制器独立承担。
3. 步态规划与全身协调
步态规划是人形机器人实现双足行走、转向、跑步和上下坡等复杂运动的基础。其核心任务是生成稳定、可执行的运动轨迹,并协调上肢与下肢的联动动作。
相比单一关节控制,步态规划更强调全身协同与动态稳定性,需要“小脑”控制器具备较强的实时计算和运动学求解能力。
3.4 典型技术平台案例
在当前人形机器人研发和产品验证阶段,高性能通用计算平台成为域控制器的重要选择。其中,NVIDIA Jetson AGX Orin 系列是较为典型的代表。
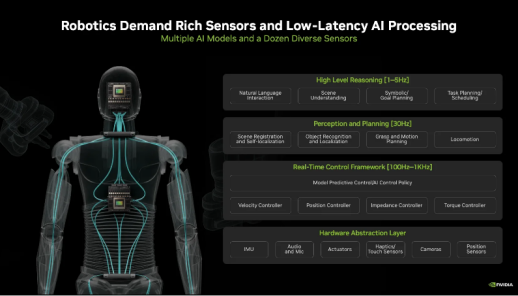
该平台具备以下特点:
-
提供最高 275 TOPS 的 AI 算力
-
搭载12核 ARM Cortex-A78AE CPU
-
集成基于 NVIDIA Ampere 架构的GPU
-
支持多路高速 IO,包括以太网、USB 3.0、CAN 总线等
这类平台能够同时满足“大脑”控制器在 AI 推理、多模态感知和决策规划方面的高算力需求,同时通过外接实时控制单元或协处理器,形成“大脑 + 小脑”分层域控制器架构。
人形机器人的域控制器架构通常采用“大脑—小脑”分层设计,分别承担高层次认知决策和低层次运动控制任务。这种架构既继承了汽车域控制器在算力集中和功能整合方面的优势,又针对人形机器人对实时性和运动安全的特殊需求进行了差异化设计。
从架构理念上看,人形机器人域控制器的发展路径,与汽车行业从分布式 ECU 向集中式域控制器演进的过程高度相似,但在控制精度、实时性和系统协同方面提出了更高要求。
四、汽车与人形机器人
域控制器的对比分析
域控制器技术虽然起源于汽车行业,但其核心思想并不局限于车辆控制场景。随着人形机器人对算力集中、系统协同和软件复杂度的需求不断提升,这一架构正在被自然迁移并重构。本章将从架构理念、技术实现和工程约束等多个维度,对汽车与人形机器人域控制器进行系统对比,分析二者的共性基础与关键差异。
4.1 相似之处分析
从整体架构和技术路线来看,汽车域控制器与人形机器人域控制器在多个关键维度上呈现出高度相似性,这也是域控制器技术能够实现跨领域迁移的根本原因。
1. 架构理念高度一致
无论是在汽车还是在人形机器人领域,域控制器的引入都源于同一个核心问题:分布式控制架构带来的系统复杂度和性能瓶颈。
两者都采用了“功能集成 + 算力集中”的设计理念,将原本分散在多个控制单元中的功能,整合到更高性能、更高集成度的统一计算平台上。这种架构带来的直接收益包括:
-
减少控制单元数量,简化系统结构
-
提高算力利用效率,支撑复杂算法运行
-
降低软件耦合度,便于系统迭代和功能扩展
从这一点看,人形机器人在控制系统架构上的演进路径,与汽车电子电气架构的演进具有明显的“镜像关系”。
2. 多传感器融合是核心能力
无论是智能汽车的自动驾驶系统,还是人形机器人的环境感知与自主行动,都依赖于对复杂外部环境的准确理解。这一目标决定了两者都必须具备多传感器融合能力。
典型的传感器组合包括:
-
摄像头
-
激光雷达与毫米波雷达
-
惯性测量单元(IMU)
-
力/扭矩等状态传感器
域控制器需要对来自不同传感器的数据进行时间同步、空间对齐和信息融合,从而形成统一、可靠的环境模型。这一过程在技术路径上高度相似,为域控制器软硬件平台的复用提供了可能。
3. 严格的实时性要求
安全性是两类系统的共同底线,这直接转化为对实时性的严苛要求。
-
在汽车中,域控制器需要在毫秒级时间内完成感知、判断和执行,例如紧急制动或避障操作。
-
在人形机器人中,域控制器需要持续、实时地调整姿态和关节输出,以维持平衡和运动稳定性,任何延迟都可能导致跌倒甚至结构损坏。
虽然具体控制对象不同,但两者都属于强实时系统,对控制周期的确定性和响应延迟极为敏感。
4. 异构芯片架构成为主流选择
在算力需求和任务类型高度多样化的背景下,汽车和人形机器人域控制器普遍采用异构计算架构。典型配置为:
-
CPU:负责系统调度、控制逻辑和实时任务
-
GPU/AI 加速器:负责并行计算、图像处理和 AI 推理
这种架构能够在同一平台上兼顾实时控制和高性能计算需求,是当前阶段实现复杂智能系统的最优解之一。
4.2 差异对比分析
尽管在架构理念和技术手段上存在诸多相似之处,但汽车与人形机器人所处的应用场景本质不同,这也决定了两类域控制器在设计目标和工程约束上存在显著差异。
1. 控制对象的物理属性差异
汽车的控制对象主要是轮式行驶系统,其运动自由度相对有限,控制目标集中在纵向、横向和姿态稳定等维度。相比之下,人形机器人通常拥有 数十个甚至上百个自由度,控制对象高度冗余且强耦合。
这意味着人形机器人域控制器需要处理更加复杂的运动学和动力学问题,其控制计算规模和实时复杂度明显高于汽车系统。
2. 控制精度与实时性等级不同
虽然两者都对实时性有严格要求,但侧重点有所不同:
-
汽车域控制器更强调功能安全与容错能力,允许在极短时间内采取保守策略(如紧急制动)。
-
人形机器人域控制器则更强调连续、精细的动态控制,对控制频率、时延抖动和精度的要求更高。

在人形机器人中,即使是微小的控制误差,也可能在连续动作中被放大,导致整体运动失稳。
3. 运动复杂度与协调难度差异
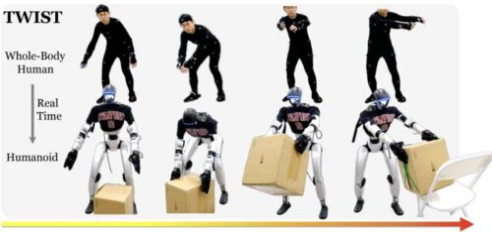
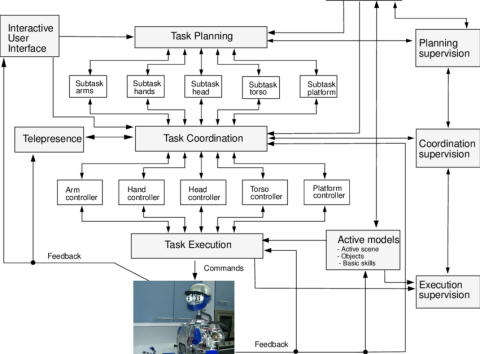
汽车的运动模式相对单一,控制逻辑具有较强的工程可预测性。而人形机器人需要完成行走、转向、上下台阶、搬运物体等高度复杂的动作,涉及全身多关节的协同控制。
这要求人形机器人域控制器在架构上更加强调分层控制、快速反馈和全身协调能力,而非单一功能的最优解。
4. 安全边界与失效后果不同
在汽车系统中,域控制器失效可能通过机械冗余、驾驶员接管等方式进行补偿。而在人形机器人场景中,控制失效往往意味着直接跌倒甚至损坏设备,对系统稳定性和故障恢复能力提出了更高要求。
因此,人形机器人域控制器在安全设计上,往往需要引入更加保守的控制策略和更高频的状态监测机制。
五、小 结
总体来看,汽车与人形机器人域控制器在架构理念、多传感器融合、异构计算和实时控制等方面具有高度一致性,这为域控制器技术的跨领域迁移提供了坚实基础。但与此同时,两者在控制对象、运动复杂度、控制精度和安全边界等方面存在本质差异,决定了人形机器人域控制器不能简单照搬汽车方案,而需要在实时性、协调性和系统鲁棒性方面进行深度重构。
正是这些共性与差异的并存,构成了域控制器技术从汽车走向人形机器人的关键技术挑战,也为下一章对未来发展趋势的讨论埋下伏笔。
域控制器技术起源于汽车行业,在电动化、智能化和软件定义汽车浪潮的推动下,经过多年工程实践和规模化验证,已经发展成为现代汽车电子电气架构的核心组成部分。从分布式 ECU 到集中式域控制器,再向中央计算平台演进,这一技术路线有效解决了系统复杂度、算力分散和软件迭代困难等长期存在的问题。
随着人形机器人产业的快速兴起,域控制器这一成熟的系统架构思想,正在突破行业边界,在机器人领域找到新的应用场景,并展现出强大的技术通用性和跨领域迁移能力。通过对汽车与人形机器人域控制器的对比分析可以看出,两者在“功能集成、算力集中、软件驱动”的总体架构理念上高度一致,但在具体应用层面,又因控制对象和应用场景的本质差异,呈现出截然不同的技术特征和工程挑战。
相较于汽车域控制器,人形机器人域控制器面临着更为严苛的技术要求。一方面,人形机器人需要同时处理多模态感知、高级智能决策和高精度运动控制,对计算平台的算力密度、实时性和协同性提出了更高标准;另一方面,其控制对象具有多自由度、强耦合和高度动态的特点,使得控制精度和系统稳定性成为决定性因素。这些挑战不仅加大了工程实现难度,也持续推动着芯片、操作系统、控制算法以及系统架构等相关技术的快速演进。

从产业发展的角度看,人形机器人域控制器正逐渐成为人工智能技术与机器人技术深度融合的关键载体。它不仅是算力和控制能力的集中体现,也是软件生态、系统安全和智能演进能力的综合平台。随着高能效计算芯片、实时操作系统以及大模型技术的不断成熟,人形机器人域控制器的能力边界将持续拓展,其在整机系统中的地位也将愈发重要。
更进一步来看,域控制器技术的跨行业应用,反映了现代工程技术发展的一个重要趋势:底层架构和核心技术具备高度通用性,不再被单一行业所限定。这种技术迁移一方面加速了新兴产业的成长,降低了系统架构从零构建的成本;另一方面,也反过来推动了传统行业在架构理念和技术路线上的持续升级,形成良性互动。
对于从事汽车电子、机器人、人工智能等相关领域的工程师和研究人员而言,深入理解域控制器技术从汽车走向人形机器人的演进过程,不仅有助于把握当前技术发展的脉络,更有助于在未来的技术创新中做出前瞻性的架构选择。
当前,人形机器人产业正处在由技术验证迈向规模化应用的关键阶段。作为其核心技术组件之一,域控制器将在系统性能提升、成本控制和安全可靠性保障等方面发挥决定性作用。可以预见,在技术持续进步和产业生态不断完善的共同推动下,人形机器人将逐步从实验室走向真实应用场景,最终走进千行百业乃至千家万户,为人类社会创造更大的价值。
参 考:
1. Manufacturing Robotics Report: Hardware | Blog | Protolabs
2. Left: overview of ESCHER's degrees of freedom. Right: hardware... | Download Scientific Diagram
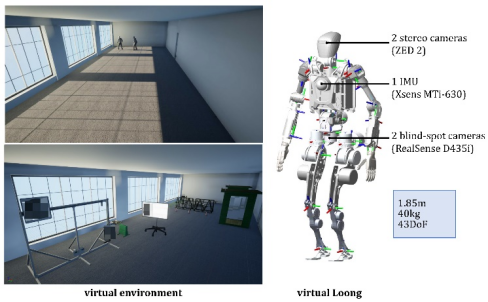
3. DT-Loong: A Digital Twin Simulation Framework for Scalable Data Collection and Training of Humanoid Robots
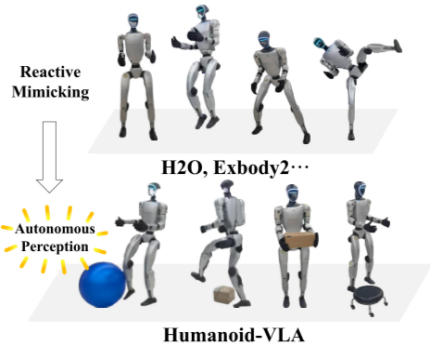
4. [Literature Review] Humanoid-VLA: Towards Universal Humanoid Control with Visual Integration
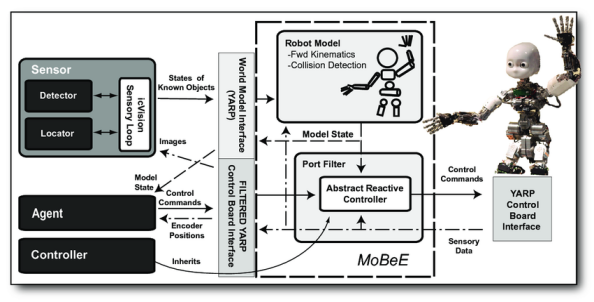
5. Simplified architecture of the MoBeE system-The Sensor, the Agent and... | Download Scientific Diagram
6. SARCOS biped humanoid robot developed by NICT/ATR. (a) Hardware. (b)... | Download Scientific Diagram
(A) Appearance of Wukong-IV. (B) Joint configuration and base... | Download Scientific Diagram
7. Hierarchical control architecture for coordinated task execution in... | Download Scientific Diagram
8. Humanoid robots ready for LLMs – Dr Alan D. Thompson – LifeArchitect.ai
9. 英伟达发布人形机器人“新大脑”,背后产业链大揭秘 - 机器人大讲堂
10. 一文读懂人形机器人,产业链全景扫描(上篇)__财经头条__新浪财经
11. 机器人产业的现状、挑战与未来方向 | 人人都是产品经理
12. 人形机器人创新发展指导意见 | PDF
13. Huawei’s Auto Ambitions. Huawei’s Rotating Chairman Zhijun Xu… | by Shuai Chen | Medium
14. Detailed explanation of the five domain controller technologies for autonomous driving-EEWORLD
/ END /
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
