
人形机器人关节模组是集驱动、传动、传感与控制于一体的精密部件,其功能类似于生物体内的肌肉骨骼系统,负责驱动和控制机器人各个关节和部件的运动。通过电机提供动力,经减速器变速增扭后,由编码器反馈位置信息,最终由驱动器实现精确控制。

(一)核心性能指标
-
扭矩密度:单位质量或体积输出的最大扭矩。例如,某关节模组质量为 2kg,输出扭矩 40N・m,则质量扭矩密度为 20N・m/kg。高扭矩密度意味着更轻量化的设计,使机器人动作更敏捷。扭矩密度的提升主要依赖于电机性能(如磁场强度、绕组优化)、减速器效率(如类型和传动效率)以及热设计(如过载能力和散热优化)、集成设计等。
-
响应速度:从接收到指令到完成动作的时间。响应速度不仅取决于电机的电气响应,还受机械响应(如传动系统刚性)和系统延迟(如传感器反馈、控制算法处理、通信延迟)的影响。
-
能效比:是衡量其动力系统将输入能量转化为机械运动效率的关键指标,直接影响机器人的续航、 热管理和运动性能。高效能关节模组能显著提升机器人续航,降低散热需求。能效比的提升依赖于电机效率、减速机构效率以及热设计与热管理的优化。
-
精度 :包括绝对精度(目标位置偏差)、重复精度(多次定位一致性)和分辨率(最小可识别位移)。高精度关节模组可实现类似 Shadow Hand 的灵巧手部操作,其精度主要依赖于电机类型、减速器背隙、传感器分辨率以及控制算法的优化。
(二)旋转关节模组
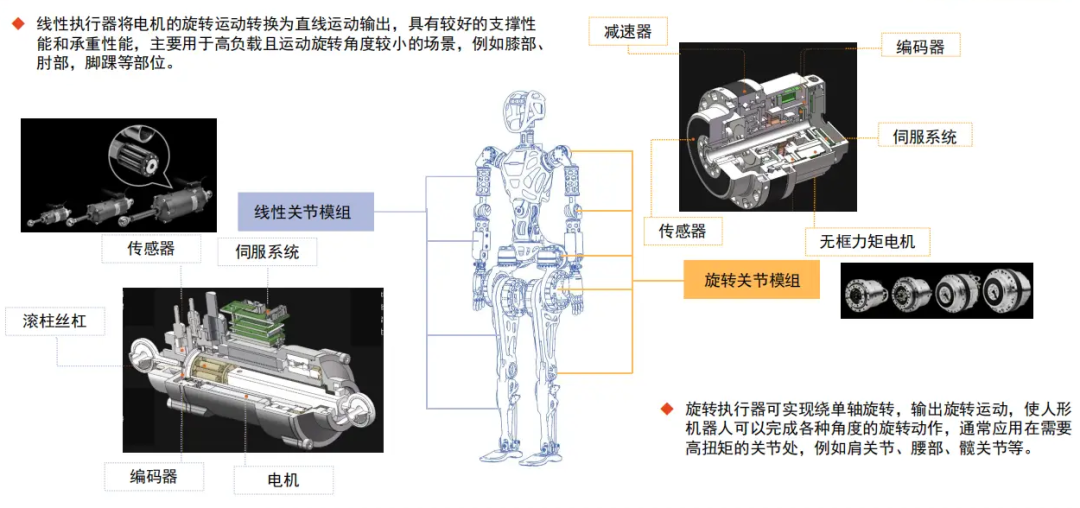
旋转执行器可实现绕单轴旋转,输出旋转运动,使人形机器人可以完成各种角度的旋转动作,通常应用在需要高扭矩的关节处,例如肩关节、腰部、髋关节等。从成本来看,旋转执行器中,谐波减速器、扭矩传感器、无框力矩电机成本占比相对较高,分别为36.0%、30.0%、13.5%,合计占旋转执行器成本的79.5%。

-
按减速器分类 :谐波减速器以大减速比、轻量化著称,适用于手臂、腰部等需要灵活运动的部位;行星减速器刚性高,适合腿足部;RV 减速器精度高、抗冲击,常用于髋部、腿部等重负载位置。
-
按电机分类 :内转子电机响应快,外转子电机扭矩大,可根据应用场景选择。
-
按是否带抱闸分类 :带抱闸的关节模组可在断电时锁定关节位置,适用于需要静态支撑的场景,如机器臂下电后的姿态保持。
(三)直线关机模组
线性执行器将电机的旋转运动转换为直线运动输出,具有较好的支撑性能和承重性能,主要用于高负载且运动旋转角度较小的场景,例如膝部腰部,脚踝等部位。线性执行器中,行星滚柱丝杠、力传感器、无框力矩电机的成本占比较高,分别为64.2%、16.1%、7.2%,合计占线性执行器成本的87.5%。
(1)电机 + 滚柱丝杠 :高负载、耐冲击,但制造难度大,适用于腿部等重载部位。
(2)电机 + 滚珠丝杠 :效率高、成本低,但负载能力有限,适合手臂、手腕等轻负载部位。
(四)关键部件拆解
关节模组的性能提升依赖于七大核心部件的协同创新,每个环节的技术突破都将推动机器人运动能力的跃升。
1.材料:轻量化与高强度的平衡术
材料创新是关节模组实现 “轻负荷、高输出” 的基础。当前主流技术路径呈现多元化特征:
·结构材料:达闼采用高强度合金与复合材料降低关节重量,天链机器人则通过3D打印技术制造镂空结构,结合碳纤维复合材料实现极致轻量化。
·功能材料:非晶磁性材料突破传统电机体积限制,达闼研发的微型电机直径仅35毫米,在保证扭矩的同时实现轻量化;超高分子量聚乙烯(UHMWPE)腱绳可减重 30%,已应用于手部关节设计。
·工程塑料:(如 PEEK、PTFE)、碳纤维复合材料和陶瓷材料结合 3D 打印技术,可制造复杂结构,实现关节模组极致轻量化。
·前沿探索:基于类人胶原蛋白的水凝胶支架,以93.43%的孔隙率和0.96 MPa的压缩模量,为关节减振设计提供新思路;东京大学的生物混合驱动器采用“卷寿司式”肌肉纤维排列,寿命长达178天,转动速度达500度/秒。
2.减速器:精密传动的 “动力转换器”
减速器是关节模组的 “力放大器”,直接决定扭矩密度与传动精度,目前形成三大技术路线主导市场。
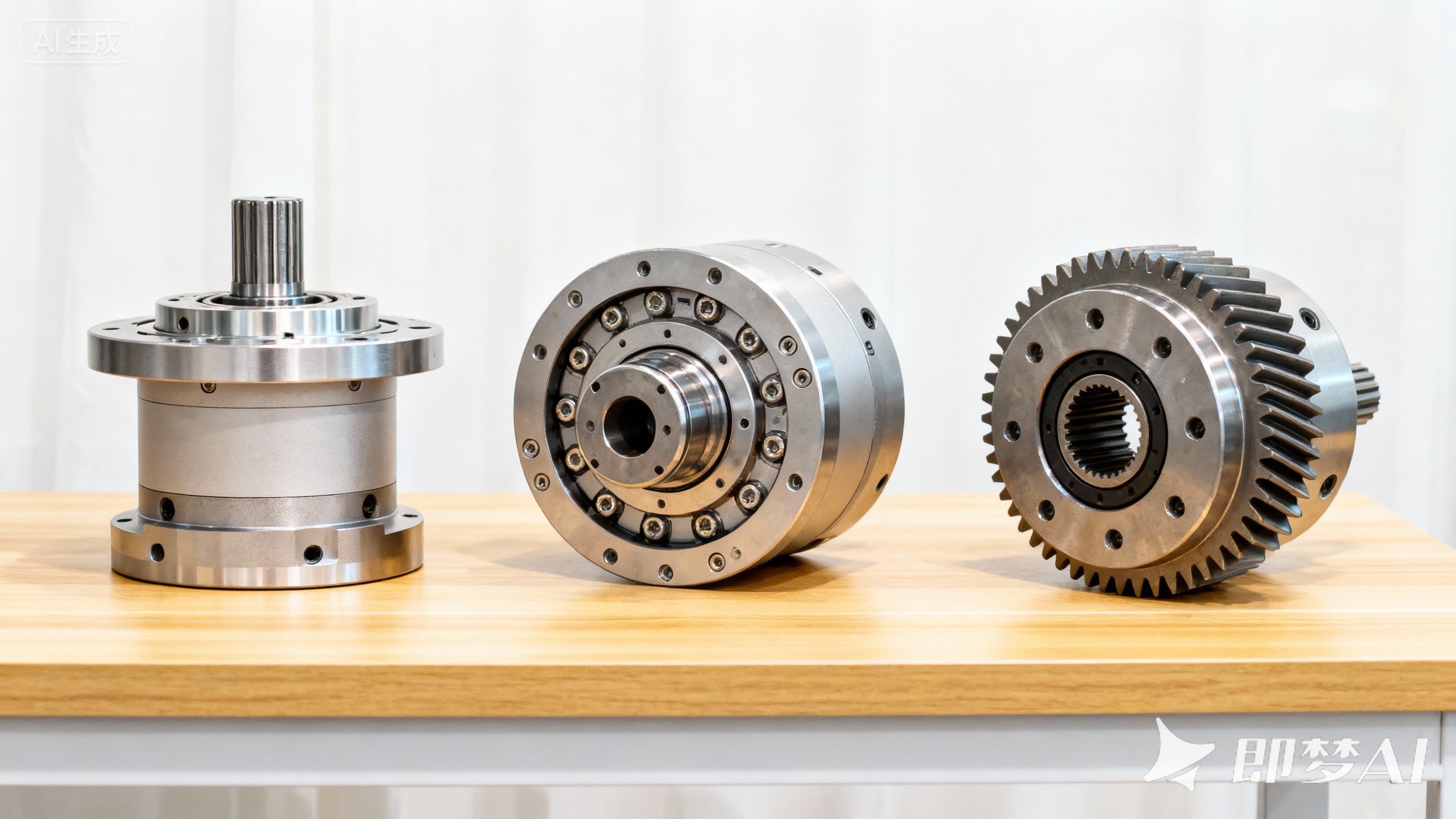
·RV减速器:重载场景核心,承载能力超5000Nm,寿命超6000小时,大规模量产后成本可降至1.5 万元/只,主要用于髋、肩等部位。
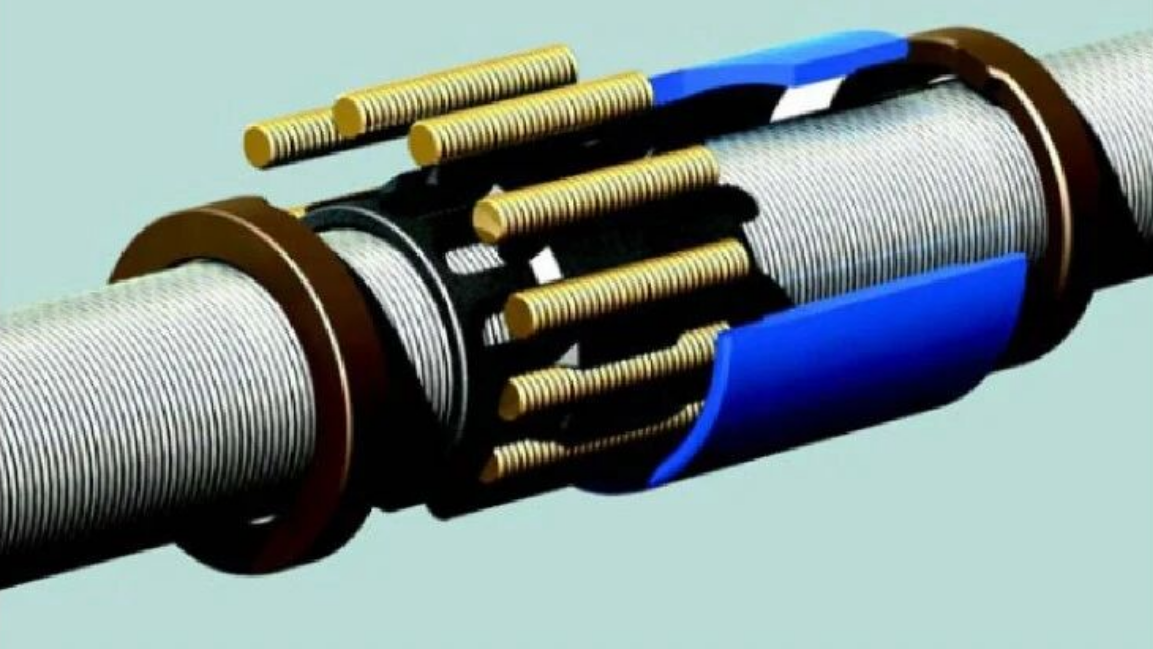
·谐波减速器:精细动作首选,传动精度<1 弧分,寿命>8000 小时,天链机器人通过正向研发技术,将其与电机高度集成,实现性能跃升。谐波减速机主要由柔轮、刚轮、波发生器组成,其中柔轮齿数比刚轮少2个,因此波发生器转一圈,柔轮反向转2个齿,以此实现减速。谐波的特点是理论零背隙,体积可以做得非常小。

传动的原理在于柔轮和刚轮的齿数差。谐波齿轮是一种独特的机械齿轮系统,在紧凑轻便的包装中允许很高的减速比。与传统的齿轮系统(例如斜齿轮或行星齿轮)相比,它在相同的空间内可实现高达30及以上倍的更高减速比。谐波传动比=输出端(柔轮或刚轮)齿数/刚轮和柔轮齿数差(一般为2)。具有体积小、噪声小、传动比大,传动精度高、回差小、传动效率高等优点。缺点因为是靠柔轮变形传动,所以刚度比较低,不耐冲击。
行星减速器:行星减速器是一种机械传动装置,主要用于降低输入轴的转速,同时增加输出轴的转矩。它利用行星齿轮机构的传动原理,实现高效率、高扭矩密度和紧凑的结构设计。

高减速比:行星减速器可以通过多级行星齿轮的合来实现高减速比,通常在10:1到100:1之间,甚至更高。
高扭矩密度:由于行星减速器的结构紧凑,它能够在较小的体积和重量下提供较大的输出扭矩。
高效率:行星齿轮机构的设计使得啮合效率高,传动损失小,因此整个减速器的效率通常很高,可以达到90%以上。紧凑结构:行星减速器的设计紧凑,占用空间小,重量轻,便于集成到各种设备中,适合空间受限的应用场景。
低噪音运行:由于行星齿轮的平稳合,行星减速器在运行时音低,振动小。高精度:行星减速器可以提供高精度的传动,适合需要精密控制的应用。长寿命和高可靠性:行星减速器通常设计有良好的润滑和密封系统,能够在恶劣环境下长期稳定运行。
3.电机:动力输出的 “能量核心”
电机作为动力源,其功率密度与响应速度直接影响关节性能:
·无框力矩电机:去外壳设计可直接集成于关节,功率密度>8kW/kg,响应时间<1ms,占机器人成本的16%,单机用量可达28个。
·空心杯电机:专为灵巧手设计,能实现高速捏合与微力操作,是手部关节的核心驱动部件。
·轴向磁通电机:搭配低减速比行星减速器,可实现高爆发力与快速响应,已应用于青龙机器人的腿足系统。
4.传感器:实时感知的 “神经末梢”
智能关节依赖多模态传感器实现精准控制,目前已形成全方位感知体系:
·力觉传感器:六维力传感器可实时解算32+关节运动路径,保障动态平衡,是力控核心部件。
·位置与状态传感器:编码器提供位置反馈,温度传感器监控运行状态,达闼SCA关节通过·多传感器融合实现 “自感知”,能适应动态环境变化。
·集成化趋势:天链机器人的关节模组已实现力矩传感器与3D视觉的集成,结合电流估算力反馈模型,具备拖拽示教与力反馈能力。
5.轴承与其他关键部件
轴承作为运动支撑单元,其精度直接影响关节寿命;行星滚柱丝杠则是线性关节的核心,占机器人成本的19%,特斯拉Optimus单机用量14根,价值超2万元,但目前仍依赖Rollvis等进口品牌,是国产替代的关键环节。
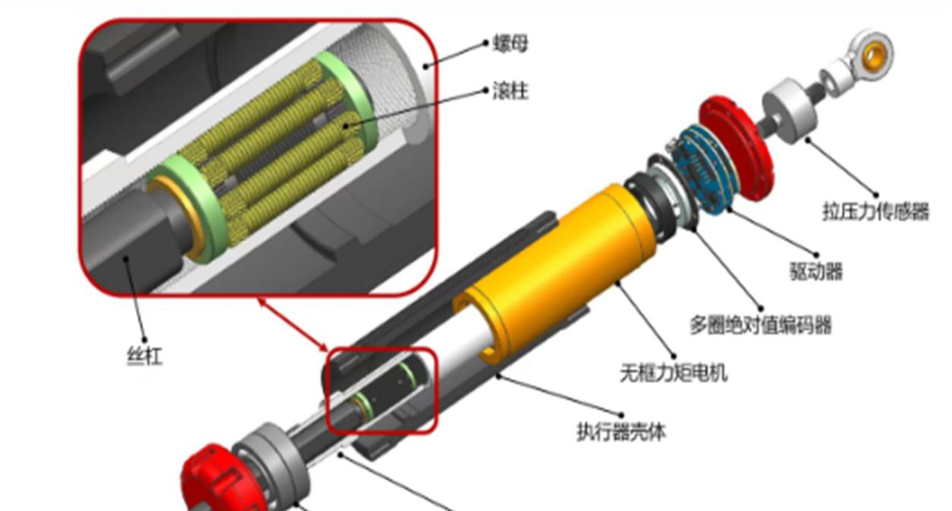
·滚柱丝杠线性关节
线性执行器方案:无框力矩电机+行星滚柱丝杠+力传感器+编码器+驱动器+关节CNC件,即使是直线关节,它的动力产生源头也是基于旋转的无框力矩电机,是通过丝杠这一减速元件把相应的旋转运动最终转化成直线运动。
行星滚柱丝杠以丝杠旋转作为驱动,通过丝杠与滚柱之间的旋运动,由滚柱带动螺母做直线运动。表现:滚柱作为行星轮,螺母作为齿圈,当丝杠旋转时,滚柱围绕丝杠作行星运动,同时通过螺旋传动原理将丝杠旋转运动转化为螺母直线往复运动。
Optimus关节分布:Optimus 执行器布置方案为14个直线执行器+14个旋转执行器:分布在肩部(3个旋转)x2、大臂(1个直线)x2、小臂(2个直线+1个旋转)x2、腰部(2个旋转)、髋部(2个旋转)x2、大腿(2个直线)x2和小腿(2个直线)x2。
(五)旋转电机控制器硬件模块设计
人形机器人关节模组的旋转电机控制器是实现关节高精度运动的核心硬件单元,其设计需兼顾控制精度、功率驱动能力、可靠性及模块化集成。系统架构可分为 核心控制层、驱动执行层、传感器反馈层、电源管理层、通信接口层 五大层次,各层通过硬件电路与信号链路实现协同工作。以下为分层结构思维导图:

-
核心控制层:算法处理与逻辑调度
1. 主控芯片选型与架构
-
MCU(微控制器)
优势:低功耗、成本低、集成度高,适合中小功率关节(如膝关节、肘关节)。
典型型号
STM32H743VIT6:Arm Cortex-M7内核(480MHz),集成FPU与DSP指令集,支持浮点运算,内置16位ADC(采样率2.4MSPS),适合实时PID控制。 NXP RT1064:Cortex-M7(600MHz),支持FlexIO外设,可自定义编码器解码逻辑。 -
DSP(数字信号处理器)
优势:专用乘法累加单元(MAC),适合复杂算法(如矢量控制、卡尔曼滤波),处理速度优于MCU。
典型型号:TI TMS320F28379D,32位浮点DSP(200MHz),集成CLA协处理器,支持12路PWM输出,内置增强型正交编码脉冲(eQEP)模块。
-
FPGA/SoC(现场可编程门阵列/片上系统)
优势:并行计算能力强,可自定义硬件逻辑(如编码器插值、PWM死区生成),适合高速同步控制(如髋关节多电机协同)。
典型方案:Xilinx Zynq-7000系列(ARM Cortex-A9 + FPGA),ARM处理上层逻辑,FPGA实现底层时序控制,支持1ns级精度PWM生成。
2. 外围电路设计
-
晶振与时钟管理
-
主控芯片需外部晶振(8MHz-25MHz)提供基准时钟,通过PLL锁相环倍频至目标频率(如STM32H7最高480MHz)。 -
高精度场景可使用温度补偿晶振(TCXO),频率稳定性±0.5ppm。 -
调试与存储
-
JTAG/SWD接口用于程序下载与在线调试,需配置上拉电阻(10kΩ)防止信号悬浮。 -
片外Flash(如QSPI接口的W25Q128JV)用于存储用户参数与固件,EEPROM(24LC256)存储校准数据(如编码器零位偏移)。 -
逻辑控制单元(CPLD/FPGA)
-
独立CPLD(如Altera MAX10)可分担主控压力,实现以下功能: -
PWM信号处理:生成互补PWM波形,插入死区时间(2-4μs,防止桥臂直通)。
-
编码器解码:对AB相脉冲进行四倍频(如2000线编码器四倍频后分辨率8000线),计算转速(M/T法,适用于宽转速范围)。
-
硬件保护逻辑:当检测到过流信号时,立即封锁PWM输出,同时向主控发送中断信号。
-
驱动执行层:功率转换与电机控制
1. 电机类型与驱动方案
|
电机类型 |
适用关节 |
驱动电路特点 |
控制算法 |
|
有刷直流电机(DC) |
小型关节(手指、腕部) |
H桥电路,正反转控制,电流环响应快 |
双闭环控制(速度+电流) |
|
无刷直流电机(BLDC) |
中功率关节(肘、膝) |
三相全桥,换相需霍尔/反电动势检测 |
6-step方波控制(开环)/矢量控制(闭环) |
|
永磁同步电机(PMSM) |
高扭矩关节(髋、肩) |
三相全桥,需高精度位置反馈 |
FOC磁场定向控制(矢量控制) |
2. 功率驱动电路设计
-
H桥驱动(有刷电机)
-
电路结构:4个MOSFET(上桥臂P沟道/下桥臂N沟道,或全N沟道+电平抬升),续流二极管(或MOSFET体二极管)处理反电动势。
-
驱动芯片
DRV8825:集成双H桥,支持2.5A持续电流,内置过热关断,支持微步细分(用于步进电机兼容设计)。 DRV8301:三相全桥驱动,支持4.5-60V输入,集成栅极驱动器(驱动电流2.5A),支持无传感器FOC(通过反电动势估算)。 -
保护电路
过流检测:在电源地串联采样电阻(如0.1Ω/1%精度),通过INA240电流放大器(增益50V/V)采集电压,主控ADC比较阈值(如超过3A触发保护)。
过压保护:分压电阻采集母线电压,当超过电池满电电压10%(如22.2V电池超过24.4V)时关断驱动。
-
三相全桥驱动(无刷/PMSM)
-
MOSFET选型:耐压值需高于电池电压1.5倍(如22.2V电池选40V耐压),导通电阻尽可能低(Rds(on)<30mΩ,降低发热),推荐Infineon IRFS4127(40V/120A,Rds(on)=11mΩ)。
-
栅极驱动:上桥臂MOSFET需自举电路(如IR2110芯片+100nF自举电容),确保Vgs达到10-15V(开启电压阈值4-5V),驱动电阻(10-22Ω)控制开关速度,减小振荡。
-
死区时间:上下桥臂切换时插入5μs死区,避免直通,可通过CPLD硬件生成或主控软件配置。
3. 散热与EMC设计
-
散热方案
-
功率模块焊接在PCB散热焊盘上,背面覆盖铝制散热片,通过导热硅脂增强热传导(热阻<5℃/W)。 -
对于高功率关节(如髋关节,持续功率>200W),可采用风冷散热(微型风扇)或热管散热。 -
电磁兼容性(EMC)
-
功率回路与信号回路分区布局,电源输入加π型滤波(100μF电解电容+100nF陶瓷电容)。 -
编码器信号线使用屏蔽双绞线,差分接收(如AM26LV32),降低共模干扰,PCB布局时远离功率走线(间距>5mm)。
-
传感器反馈层:高精度测量与状态监测
1. 位置与速度传感器
-
增量式编码器
-
原理:输出AB两相正交脉冲,相位差90°,通过计数脉冲数计算位置,频率测量转速(M法:高速;T法:低速)。
-
典型型号:欧姆龙E6B2-CWZ6C(2000线,集电极开路输出),支持线驱动输出(RS422,抗干扰能力强)。
-
解码电路:使用专用芯片(如TI DRV5013)将差分信号转为单端信号,CPLD实现四倍频(分辨率提升4倍),并检测Z相(零位信号)。
-
绝对式编码器
-
优势:无需回零操作,断电后保持位置,适合需要位置记忆的关节(如站立时的髋关节)。
接口类型:SSI(同步串行接口):主从模式,时钟频率1-10MHz,单圈精度12位(4096位置)。
BiSS-C:双向串行接口,支持更高数据速率(20MHz),集成CRC校验,典型型号:RENCO RCN-201。
2. 扭矩传感器设计
-
应变片式扭矩传感器
-
安装方式:在关节输出轴粘贴4枚应变片(2组正交,组成全桥电路),轴受扭时应变片阻值变化,电桥输出电压(灵敏度2-3mV/V)。
-
信号调理:仪表放大器(如AD620)放大信号(增益100倍),二阶低通滤波(截止频率100Hz,滤除高频噪声)。温度补偿:串联热敏电阻(如NTC 10kΩ)修正温度漂移,通过查表法或线性拟合校准。
-
非接触式扭矩传感器
磁弹性原理:轴表面磁场随扭矩变化,通过霍尔阵列检测磁场分布,典型产品:ME-Meßsysteme T40B(精度±0.05%FS,响应时间<1μs)。
3. 温度与姿态传感器
-
温度监测
-
在电机绕组嵌入NTC热敏电阻(10kΩ@25℃,B值3950K),通过分压电路采集电压,主控计算温度(公式:T=1/(1/B * ln(R/(R0)) + 1/T0))。 -
驱动器MOSFET温度通过贴装的NTC或集成温度传感器(如MAX6675)监测,超过85℃时降额运行。 -
IMU惯性测量单元
-
集成3轴加速度计(±16g)与3轴陀螺仪(±2000°/s),I2C接口(速率400kHz),用于关节姿态辅助解算(如摔倒检测时紧急制动)。
-
电源管理层:能量分配与效率优化
1. 电源输入与转换
-
电池系统
-
人形机器人常用2-6S锂电池(7.4V-22.2V),容量根据关节数量与续航需求选择(如单关节2000mAh,整机6关节共12000mAh)。 -
电池保护板(BMS)集成过充保护(4.25V/Cell)、过放保护(2.75V/Cell)、过流保护(10-30A),并通过I2C与主控通信(上报电量SOC)。 -
电源转换电路
-
逻辑电源
通过LM2596S降压模块将电池电压转为5V(给驱动芯片逻辑端、传感器供电),再经AMS1117-3.3V转为3.3V(主控与通信电路)。 -
隔离电源
使用DCP010505B隔离式DC-DC(5V输入,5V输出,隔离电压1500V),确保驱动地与控制地隔离,减少功率回路噪声干扰。
2. 能量回收与管理
-
制动能量回收
-
当关节减速时,电机作为发电机运行,反电动势通过续流二极管给超级电容充电(需双向DC-DC转换器,如TI BQ25570),能量回收率可达15%-20%。 -
低功耗设计
-
主控芯片进入睡眠模式时,关闭非必要外设(如SPI/I2C接口),驱动模块使能信号拉低,整体待机电流<10mA。
-
通信接口层:数据交互与系统集成
1. 内部通信总线
-
CAN总线设计
-
采用CAN FD(灵活数据速率)协议,速率支持500kbps(经典CAN)与2Mbps(FD模式),满足多关节实时同步需求(如10ms周期更新位置指令)。 -
总线终端电阻:120Ω(两端各一个),CAN收发器使用TJA1145(支持总线保护,抗静电±8kV),差分信号传输距离>10m。 -
SPI/I2C优化
-
SPI用于高速传感器(如绝对式编码器SSI接口),时钟频率设为10MHz,片选信号(CS)需硬件消抖(RC滤波)。 -
I2C总线挂载多个从设备(如IMU、EEPROM),使用总线扩展器(如TCA9548A)实现8路I2C切换,上拉电阻4.7kΩ确保信号完整性。
2. 外部接口与连接器
-
上位机接口
-
USB-UART转换器(如CH340G)用于调试,支持波特率115200-460800bps,上位机软件(如MATLAB/Simulink)实时监控关节状态。 -
以太网接口(RJ45)支持TCP/IP协议,用于与机器人中央控制器通信(传输路径规划指令,速率100Mbps)。 -
高可靠性连接
-
功率连接器选用大电流端子(如Phoenix Contact的插拔式端子,额定电流30A),信号连接器使用M12圆形接插件(IP67防护等级,防灰尘与溅水)。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:


活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
