
近年来政府对科技创新和智能制造的支持,机器人行业蓬勃发展,也为灵巧手行业提供了良好的发展环境。
根据共研网数据,2024-2025年,我国灵巧手行业市场规模将由125.33亿元增长至501.33亿元,期间年复合增长率300%,预计2026-2030年,我国灵巧手行业市场规模由954.39亿元增长至12534.85亿元,期间年复合增长率90.37%。
灵巧手是具身智能机器人操作的重要末端执行器,是保障具身智能机器人走进家庭和直接面对C端消费者的关键部件,其性能优劣将直接决定机器人的落地场景和生产能力。
为保障具身机器人能在为人类现实世界中具有足够高的鲁棒性,灵巧手需要参考人手进行开发,需要通过多关节多自由度的复杂精密连杆和铰链来满足对现实物体的灵活操作。
灵巧手模仿人手的结构和功能,在机器人与环境的交互中起着关键作用。机器人灵巧手能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。
如特斯拉机器人“灵巧手”使用较为经典的六电机驱动方式,和人手一样同样使用5个手指,拥有11个自由度,拇指采用双电机驱动弯曲和侧摆,其它四指各用一个电机带动,可完成搬运、浇花、实现装配任务、抓取电动工具等动作。
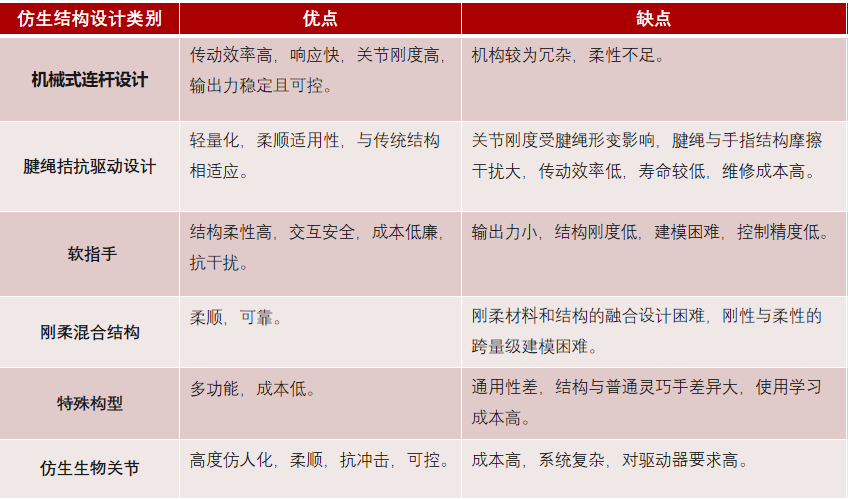
目前大多的多指灵巧手外观多为仿生设计,手指关节等内部结构主要有机械式传动(如齿轮传动等)、腱绳传动方式、软指手、刚柔结合结构、特殊构型、仿生生物关节等。
不同类型灵巧手优缺点
“人形机器人灵巧手”可以认为是人形机器人领域的“超精密铰链”,产品结构研发设计、生产、组装等工艺,与折叠手机铰链具有非常高的协同性与一致性。
为进一步拓展产品线,我司已立项自适应驱动及多维环境感知的智能灵巧手研发项目。预计初步成果方案完成时间为2026年1季度

产品定位于家庭和医疗服务场景的低成本解决方案,性能目标是能完成烹饪,叠衣服,打扫,搬运等复杂动作。
当前硬件采用电机+齿轮+滚珠丝杠+连杆方案,软件采用以视触觉为主,姿态感知为辅的多维感知方案,配合大模型算法,实现稳定可靠,精细亲和的智能灵巧手控制,可以实现19自由度的人手灵动操作。
灵巧手可使人形机器人具备操作能力、能够进入危险环境作业、真正实现替人操作,该种特殊场景应用或将很快落地。3C电子、汽车制造等行业需频繁调整产线,灵巧手是柔性制造的重要一环,市场正在加速落地,行业会维持高速增长并持续。
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
