

"当人形机器人在马拉松赛道上因关节过热集体‘退赛’,这一幕暴露出行业生死局——90%的能量转化为热量积聚在不足2mm的腔体内,特斯拉Optimus要求的450Nm/kg扭矩密度让传统散热方案彻底失效。
从工程师手持冷却剂狂奔到液冷与相变材料的尖端对决,这场散热革命将决定机器人能否真正跨过商业化的门槛。"

在人形机器人迈向产业化落地的关键阶段,一体化关节模组作为核心执行单元,其性能直接决定了机器人的运动精度、动态响应、负载能力和续航表现。然而,在高功率密度、高扭矩密度、高度集成化的设计导向下,发热问题日益凸显,已成为制约其使用寿命和稳定可靠运行的核心瓶颈。
下文将由EFNA系统阐述:发热效应带来的性能退化与安全风险,剖析一体化关节模组的发热成因,梳理当前主流的多维度热管理技术路径,展望未来主动化、智能化的热管理体系发展方向。
发热危害
从性能衰退到系统安全隐患
持续高温不仅削弱关节性能,更可能引发连锁式系统失效,影响机器人整体的可靠性、安全性和使用寿命。
(一)核心部件性能退化
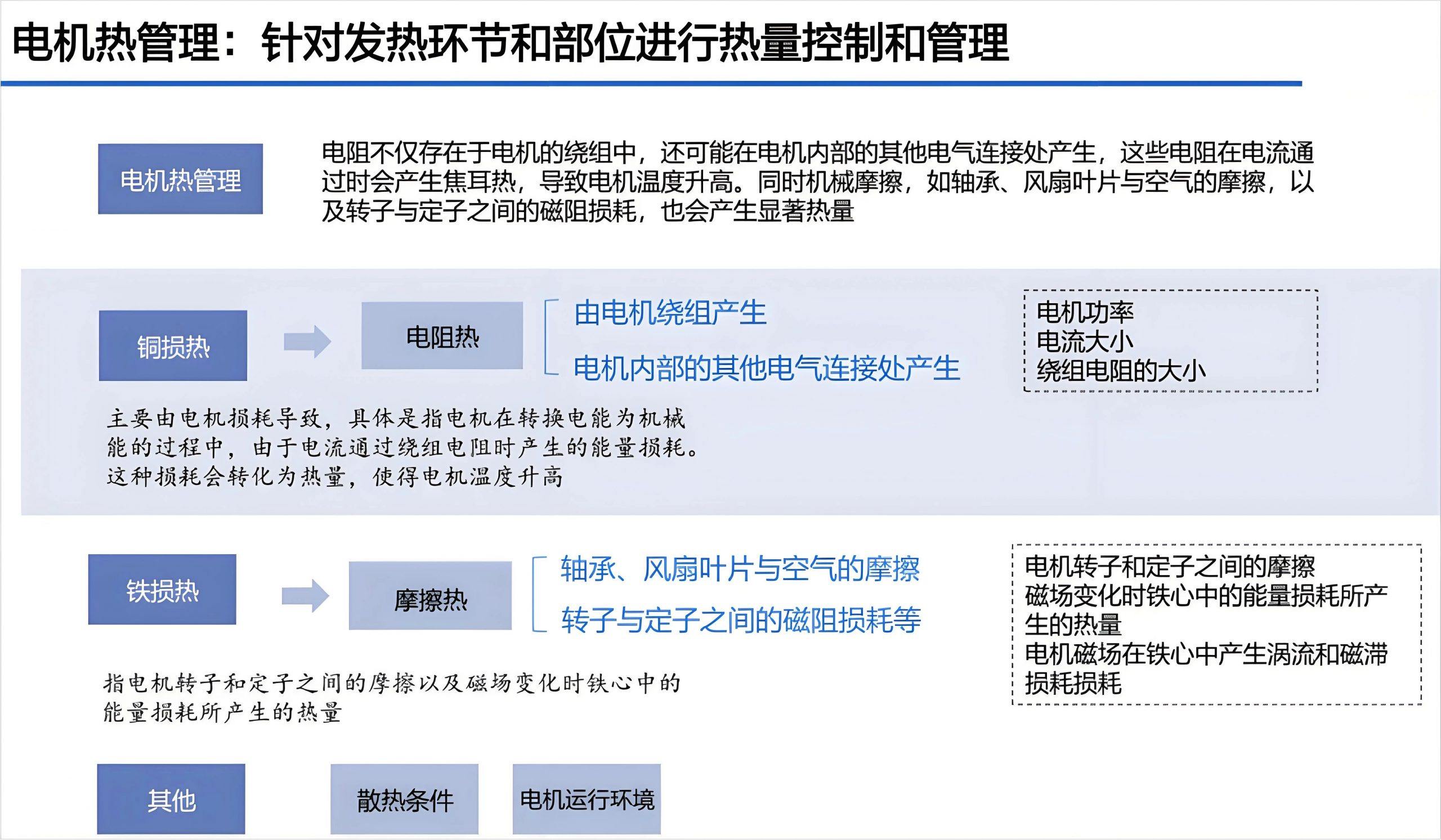
高温显著影响部件性能:结构件发生热变形,降低材料的机械性能;润滑脂会加速氧化变质,导致齿面磨损加剧;电机磁钢退磁,磁通量不可逆下降,直接影响电机效率和输出扭矩;驱动器芯片导通电阻随温度升高而增加,每上升10℃阻值约增4%,形成“温度↑→电阻↑→I2R损耗↑→温度更快↑”的正反馈循环,最终触发热降频,导致系统效率骤降。
(二)运动控制精度下降
减速器、齿轮等关节零部件在高温下发生热变形,非均匀温度场引发关节结构非对称热变形,导致背隙增大,影响传动精度,造成多轴位姿偏差。有资料显示,20℃温差可能导致定位精度从±0.1mm恶化至±0.5mm。同时,高温干扰传感器信号稳定性,编码器在80℃环境下将增加输出误差,直接影响闭环控制的准确性与响应一致性。
(三)使用寿命缩短与安全风险加剧
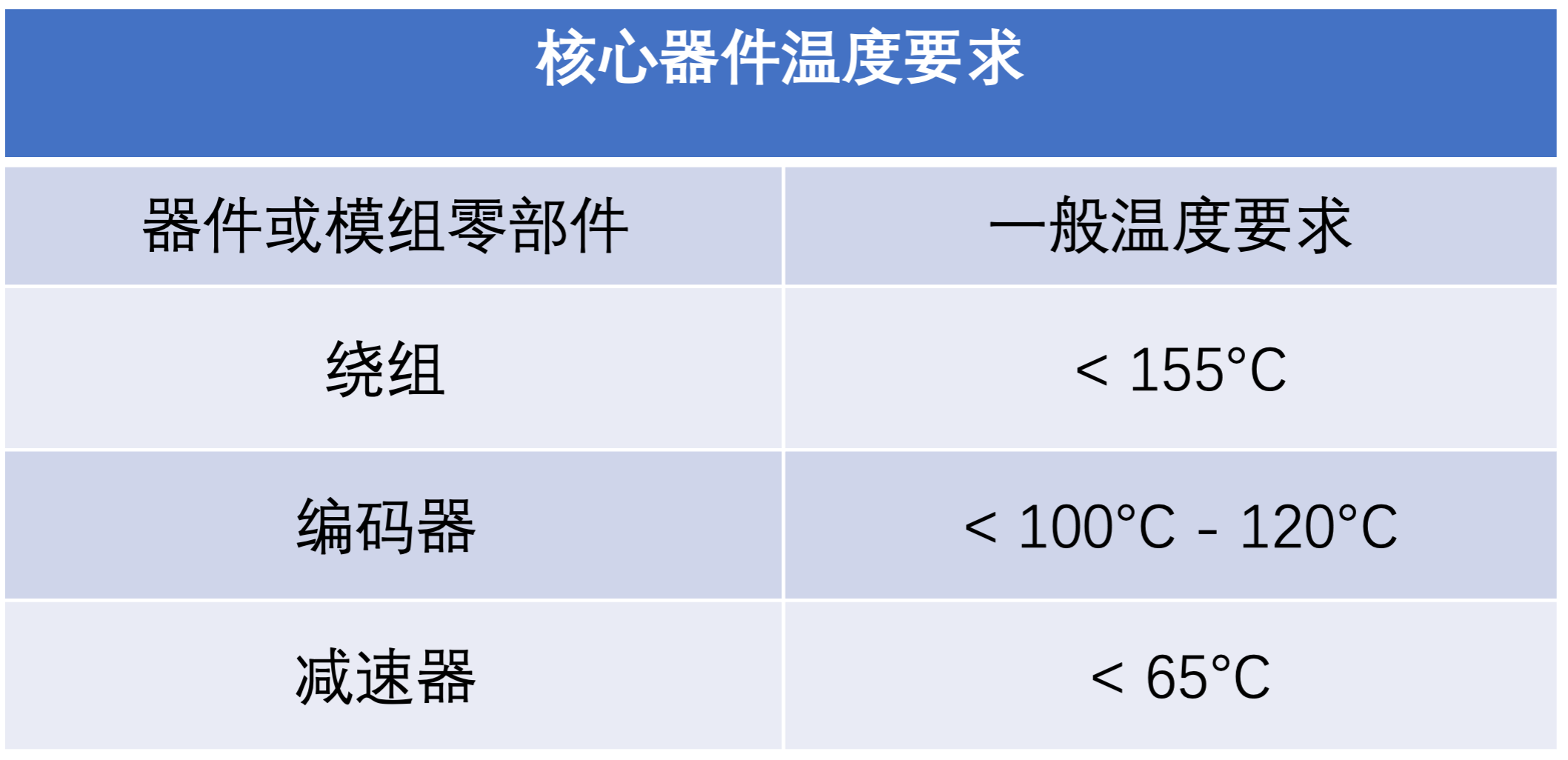
高温运行显著缩短关键部件使用寿命,当绕组温度超过155℃,绝缘材料将加速老化,每升高10℃寿命减半;加速密封件老化,易引发润滑油泄漏与粉尘侵入,降低润滑效果;极端情况下,绕组过热可能引发电气短路甚至起火,严重威胁人机安全。
发热根源
集成架构与动态工况的双重压力
人形机器人一体化关节模组的发热是结构紧凑性、供电特性与复杂工况共同作用的结果,主要体现在三个方面。
(一)高度集成引发的热聚集效应
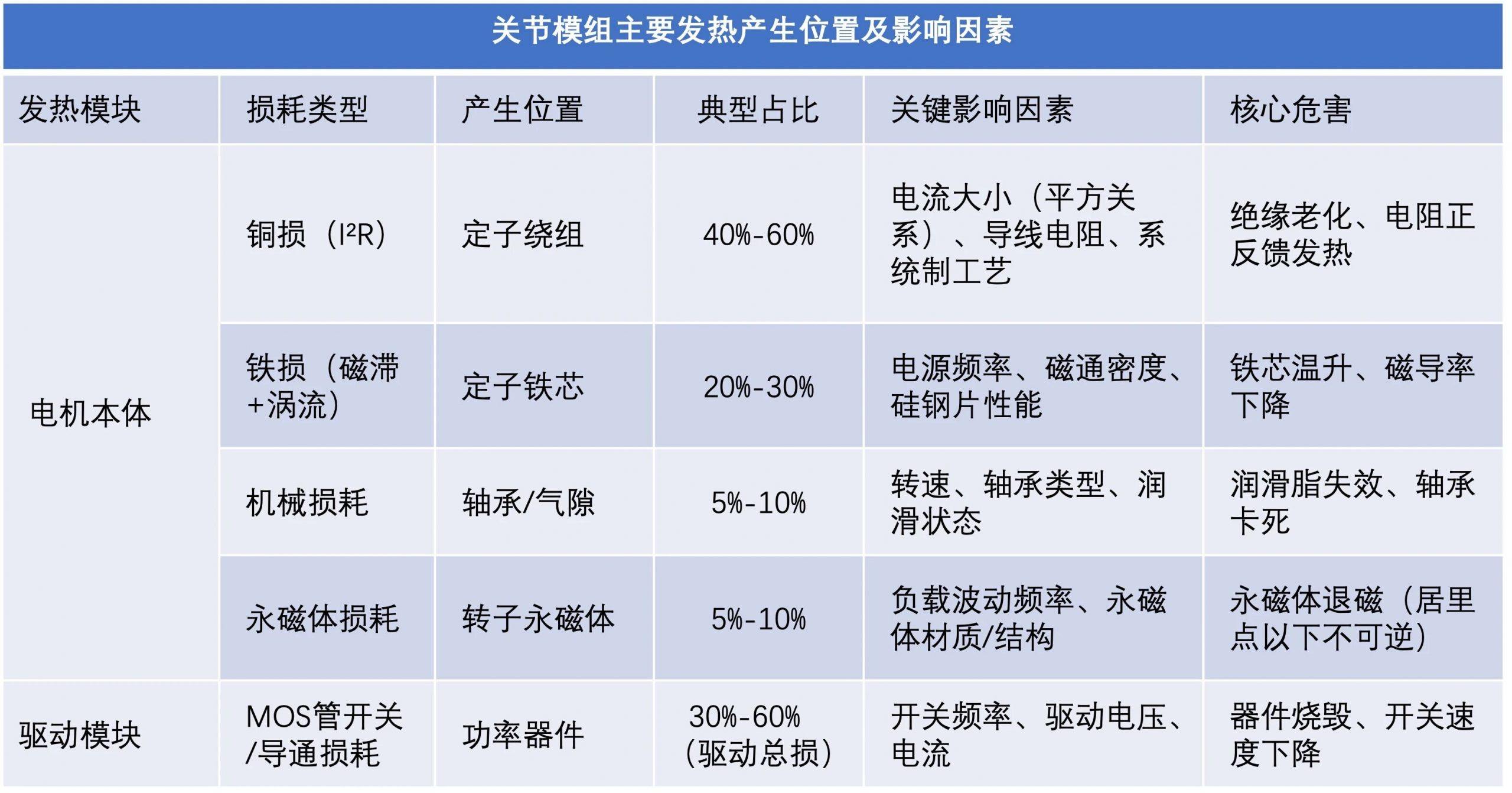
一体化设计将电机、减速器、驱动板与传感器等高度集成于有限空间内,形成“多热源耦合”结构。在狭小密闭环境中,电机铜损、铁损、齿轮机械损耗与驱动板功率器件损耗集中释放,且无法安装传统风扇,热量难以通过自然对流有效散出,极易形成局部“热岛”,加剧温升风险。
(二)低电压供电导致的热损耗放大
出于人机共融安全性考虑,人形机器人普遍采用48V及以下低压供电系统。根据功率公式 P = UI,在输出相同功率时,电压越低,所需电流越大。例如,实现500W输出功率,48V系统电流约为10.4A,而380V工业系统仅需约1.3A。电流的显著增加使得电机绕组的I2R损耗呈平方关系上升,导致热损耗水平较传统工业机器人高出3至5倍,成为热源的主要贡献者。
(三)动态负载带来的瞬时热冲击
人形机器人需应对行走、跑跳、搬运等多样化动态任务,在启动、加速或负重瞬间常需输出数倍额定扭矩,电机瞬时功率可达额定值的3–5倍,局部热流密度甚至突破300W/cm²。此类瞬态高负荷工况引发剧烈温升,不仅加速材料老化,还可能诱发磁钢退磁、齿轮胶合等不可逆损伤,对系统可靠性构成严峻挑战。
解决方案
三位一体的协同热管理体系
为应对上述挑战,行业已形成以“源头控热—散热升级—智能调控”协同并进的热管理架构。
(一)源头控热,减少热生成
1. 提高电机效率
低铜损、低铁损设计电机,通过精密线圈绕制,槽内超薄绝缘设计,降低铜损;通过高磁感硅钢片、超薄铁芯设计等降低铁损。
2. 提高减速器传动效率
采用传动效率较高的减速器类型,一般来说,行星减速器>摆线减速器>谐波减速器,结合齿轮、轴承的优化设计,最大限度减少减速器损耗。
3. 提高驱动板效率
采用新一代氮化镓(GaN)驱动技术取代硅基MOSFET技术,基于氮化镓(GaN)的驱动板,能够在更高电压、更高频率和更高温度条件下稳定工作,同时保持更低的能量损耗。与传统MOSFET相比,GaN可以提高工作效率,减少损耗可达50%。因其高频特性,可以减少对外围的磁性元件(电感、变压器)和散热器体积的依赖。
(二)散热升级,加强内部导热,增加外部散热
1. 加强内部导热
拓扑结构优化:采用电机与减速器“并联布局”的扁平化设计,替代传统串联结构,提升散热表面积;制造晶格镂空或多孔骨架结构的外壳,在实现轻量化的同时,提升有效散热面积。
高导热材料应用:在发热源与壳体间填充高导热硅胶垫片,降低界面热阻,改善热传导路径;壳体采用碳纤维增强复合材料,在保证强度与轻量的同时增强导热能力。
2. 增加外部散热
风冷散热:一体化关节设计散热风道,并设置微型风扇,如某机器人在主控板和髋关节设置主动风冷散热。
冷板式液冷:针对下肢等高动态负载关节,采用集成微通道冷板紧贴电机定子与减速器外壳,冷却液流经通道高效带走热量,散热效率较风冷显著提升。2026年北京亦庄人形机器人半程马拉松就有机器人采用液冷散热技术。

荣耀机器人半马夺冠的制胜关键之一
无泵液冷:采用基于相变材料的被动散热系统,利用吸热-相变-放热循环实现持续散热。系统无运动部件,可嵌入狭缝空间,满足高功率密度与微型化双重需求。
(三)智能调控:主动干预,预防热失控
1. 多点实时温度监测
在绕组、减速器、驱动器等关键位置布设微型温度传感器,采样频率达1kHz,数据传输延迟小于1ms,实现毫秒级温度感知与响应。
2. 动态功率分配算法
基于实时温控数据,通过AI模型动态调节各关节输出功率。当温度逼近安全阈值时,自动降额非核心动作,优先保障关键运动功能;在任务间隙启用余热回收机制,将废热用于电池加热,提升低温环境下整机能效。
3. 热预警与故障诊断系统
构建温度-性能退化关联模型,通过趋势分析预判潜在故障。系统支持分级响应机制:轻度异常时自动降频运行,严重温升时触发紧急停机,实现从预警到保护的全链条安全闭环。
结语
发热问题是人形机器人迈向高可靠性、长时运行必须跨越的技术门槛。当前,人形机器人通过各种手段,已建立了初步的热管理体系。然而,在高强度运动、瞬态热冲击防护、能量回收利用等方面仍存在挑战。
未来,随着热电集成、仿生设计与智能材料的发展,人形机器人将实现“高功率输出、低热积累、长寿命运行”的理想状态,为其真正走进家庭、服务社会提供坚实支撑。
来源:爱福纳传动技术有限公司
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐:
第二届人形机器人产业链论坛(7月3日·深圳)
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
活动推荐:
第二届人形机器人产业链论坛(7月3日·深圳)
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
更多创新演讲意向,请联系 Elaine 张 13418617872(同微信)
报名方式一:
邮箱:ab008@aibang.com

报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即刻报名!
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
