

重点内容速览:
 位置传感器:运动控制的基石
位置传感器:运动控制的基石 霍尔位置传感器 磁学编码器 精密电位计 张力传感器:绳驱灵巧手的守护者 力矩传感器:赋予灵巧手“轻拿轻放”的能力
霍尔位置传感器 磁学编码器 精密电位计 张力传感器:绳驱灵巧手的守护者 力矩传感器:赋予灵巧手“轻拿轻放”的能力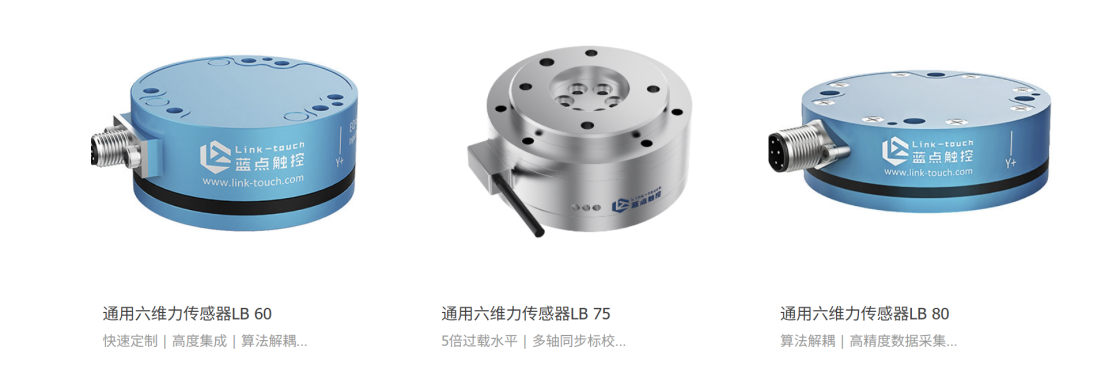
图:蓝点触控六维力传感器(来源:蓝点触控)
触觉传感器:模拟人类皮肤的精细感知 MEMS触觉传感器
MEMS传感器虽然在消费电子和工业电子领域的应用已经非常成熟了,但应用在人形机器人身上的MEMS压力传感器产业还不成熟,目前还没有看到量产的产品。主要是因为业界还有几个担忧:
-
一是精度。灵巧手如果想要平稳地拿取鸡蛋,或者抚摸不规则物体的表面,需要传感器能够感知到极其微小的力。但现在MEMS传感器的感知精度在0.1N左右,而人类指尖能感受到0.0002N的压力,两者差距巨大。
-
二是维度。市面上MEMS压力传感器基本上都是一维的,只能检测垂直于表面的正向压力,即法向力,无法感知切向力。
-
三是柔性。MEMS压力传感器因为有PCB板、封装外壳等硬质材料,缺乏柔性,很难在多曲面结构上部署,更适合以阵列形式部署在掌心,或指腹等相对平坦的地方。
-
四是环境适应性。MEMS压力传感器会受到温度、湿度、电磁干扰等影响。因为手是干活的最终端,受到的影响也是最大的。必须解决环境适应性问题才能让产品落地。
-
五是成本。目前的MEMS压力传感器的成本还偏高,难以普及。
供应商方面,敏芯股份的MEMS压力传感器处于研发阶段;华培动力全资子公司盛美芯计划会做机器人用的MEMS压力传感器,但目前还没有明确进度和成果;北京泽声科技已经在2025年推出了MEMS应变传感器芯片ZSFS1001。其他MEMS企业,例如赛微电子、安培龙、康斯特、歌尔等目前并没有做人形机器人相关MEMS传感器的计划。
可以看到,虽然压力传感器和惯性传感器都是采用MEMS加工工艺,核心工业可以复制,但企业的投入意愿并不强烈。芯查查认为,这或许跟目前人形机器的市场还没有大规模起量有关系。
霍尔效应触觉传感器基于霍尔效应的触觉传感器是目前人形机器人灵巧手中,解决多维力感知和剪切力/滑移检测最前沿且最容易落地的方案之一。与智能检测法向压力的传统压阻或电容式传感器,它能像人类指尖一样,感知物体滑落的方向和切向摩擦力。
其最大的优势是天然支持三维力解耦,而且响应速度极快且无迟滞,其缺点是怕外部强磁场干扰,以及算法与标定极其复杂。
在精度方面,根据一些厂商的宣传,精度可以做到0.01N,是目前精度比较高的触觉传感器之一。

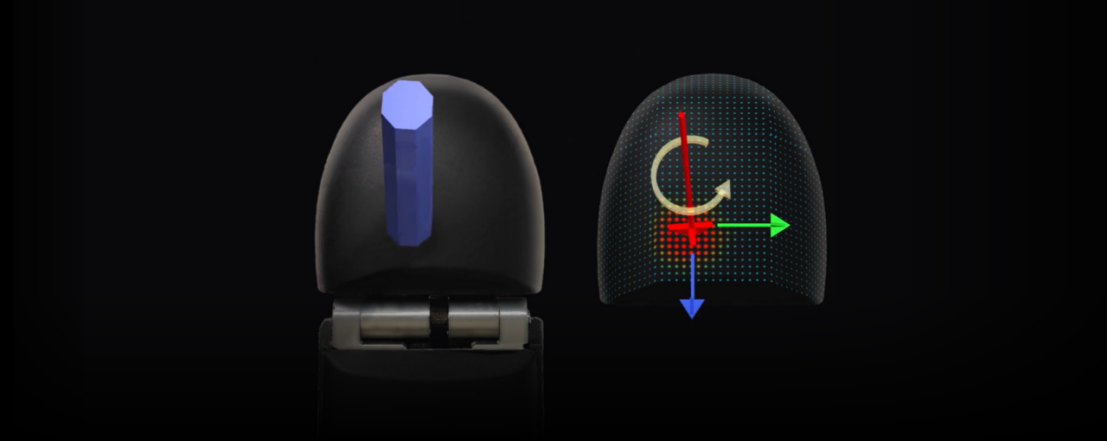
图:帕西尼第三代高精度多维触觉传感器PX6AX-GEN3(来源:帕西尼)
国内的帕西尼在2025年9月推出了其第三代高精度多维触觉传感器PX-6AX-GEN3,凭借其6D霍尔阵列式触觉传感技术积累,帕西尼多维触觉传感器GEN3采用了第三代自研芯片及封装技术,与AMSS全模量测量系统,能以每秒100万次的高频对多层嵌套磁场阵列分布进行高精度采样,经传感器内封装的非线性力学反演算法处理,最终可实现1kHz频率输出六维力(三维力+三维力矩)、力分布、材质、温度、回弹等15种触觉感知信息,并以0.01N的精细力识别能力与全量程<0.5%FS级重复精度,为具身智能提供类人般丰富细腻、稳定可靠的触觉交互信息。
视触觉传感器视触觉传感器是融合光学成像与触觉感知的传感方法。核心原理是用摄像头拍下弹性材料接触物体时的细微形变,再把这些变化转化成高清的“触觉照片”,通过摄像头观察柔软层的形变来“感受力量、纹理和滑动”。具有接近人手的动态感知与高灵敏度,适配AI与大模型的图像化数据格式,具有
易集成,抗干扰能力强的优势。
最早由东京大学研究团队于2004年提出,后经MIT CSAIL的Edward Adelson教授团队持续迭代发扬光大,并成立Gelsight公司产业化。
国内近几年也出现了不少专注于视触觉传感器的企业,例如纬钛机器人,其创始人李瑞博士师从GelSight创立者EdwardAdelson教授,延续前沿技术脉络;戴盟机器人孵化于香港科技大学科研团队;叠动科技融合MEMS工艺与视触觉技术;千觉机器人、智元机器人、帕西尼、一目科技等则通过自主研发,从多维触觉、全栈系统等方向切入视触觉传感器赛道。
电子皮肤在人形机器人灵巧手中,电子皮肤是触觉传感器的一种高级形态。如果说普通触觉传感器像指尖等一个“硬质按钮”,那么电子皮肤则像人类的皮肤一样,具备柔韧性、可拉伸性,并能完美贴合灵巧手复杂的曲面,实现大面积、高密度的触觉覆盖。
根据Grand View Research数据,全球电子皮肤市场在2024年规模约为107亿美元,预计到2030年将增长至370.9亿美元,未来五年复合年增长率约23%。柔性触觉传感器作为电子皮肤的核心基础,行业研究机构预测其市场规模到2026年将达到约45亿美元。人形机器人市场的快速扩张成为推动电子皮肤需求的重要动力。

图:福莱新材第3代电子皮肤(来源:福莱新材)
供应商方面,国际厂商包括美国的Inter Electronics和Tekscan等;国内厂商主要有汉威科技、福莱新材、华威科、帕西尼、他山科技、钛深科技、墨现科技、晶智感、矩侨工业等。其中,墨现科技的电子皮肤产品已经能够实现灵巧手的整体包覆;2026年初,福莱新材与灵心巧手签下了10万套触觉传感器(电子皮肤)订单,标志着电子皮肤正式从实验室定制走向规模化工业标配;晶智感在2025年推出了“高自由度全掌触觉解决方案”,实现了全域感应,其1397个触觉点分布于16个传感区域,该方案在灵心巧手的L20工业版灵巧手上已经实现应用。
结语活动推荐

直播推荐


往期回顾

2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
