
事实上,它们分属完全不同的技术层级,承担着截然不同的角色。
简单来说,开源模型解决的是机器人“会不会想”,而仿真平台解决的是机器人“能不能动”。
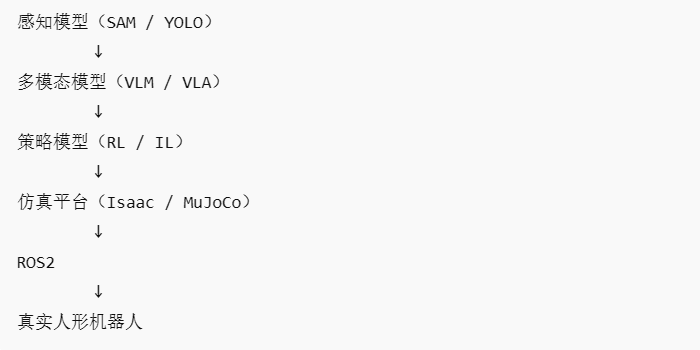
机器人开源模型,本质上是机器人的 “智能大脑”。它关注的并不是电机转速、关节结构或材料强度,而是更高层的认知问题:机器人如何理解世界、如何接收人类指令、又该采取怎样的行动策略。
这些模型通常包括视觉感知、多模态理解、行为规划和动作生成能力。通过摄像头、深度传感器或触觉信息,模型判断环境中“有什么”“在哪里”,再结合语言指令推理出“要做什么”,最终输出一连串动作决策。例如,当人类发出“把桌上的水杯递给我”这样的指令时,开源模型负责识别水杯位置、理解任务目标,并生成抓取和移动的动作序列。
随着大模型技术的发展,这类机器人模型逐渐从传统算法升级为视觉—语言—动作统一架构,也就是行业所说的具身智能模型。它们的核心价值在于提升机器人的泛化能力,让机器人不再依赖固定脚本,而是具备一定的自主理解与学习能力。
但问题在于,模型虽然知道“该做什么”,却并不知道“能不能这样做”。
模型输出的动作往往是抽象指令,例如关节角度变化或末端轨迹规划,而真实世界中却充满复杂的物理约束:摩擦、碰撞、重力、惯性、关节力矩极限,任何一个环节出错,都可能导致机器人摔倒、卡死甚至损坏硬件。
这正是仿真平台存在的意义。
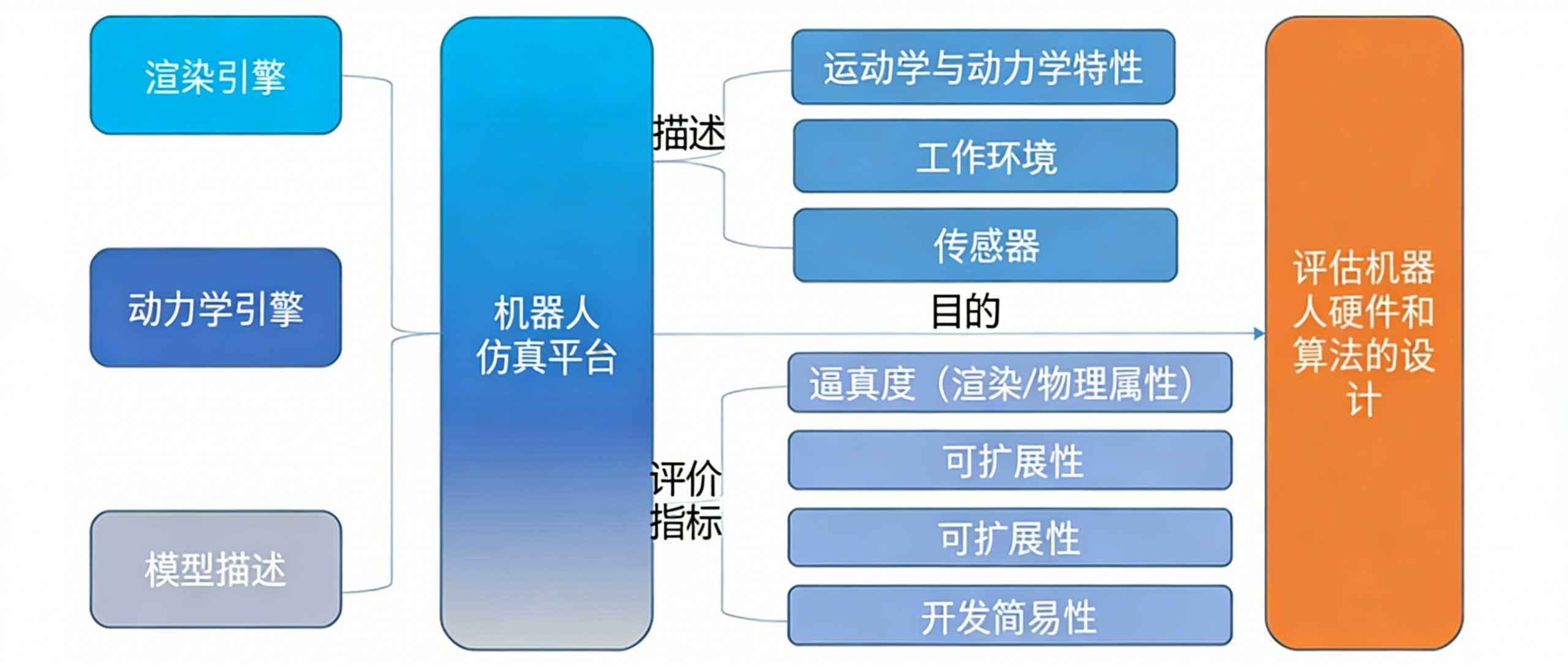
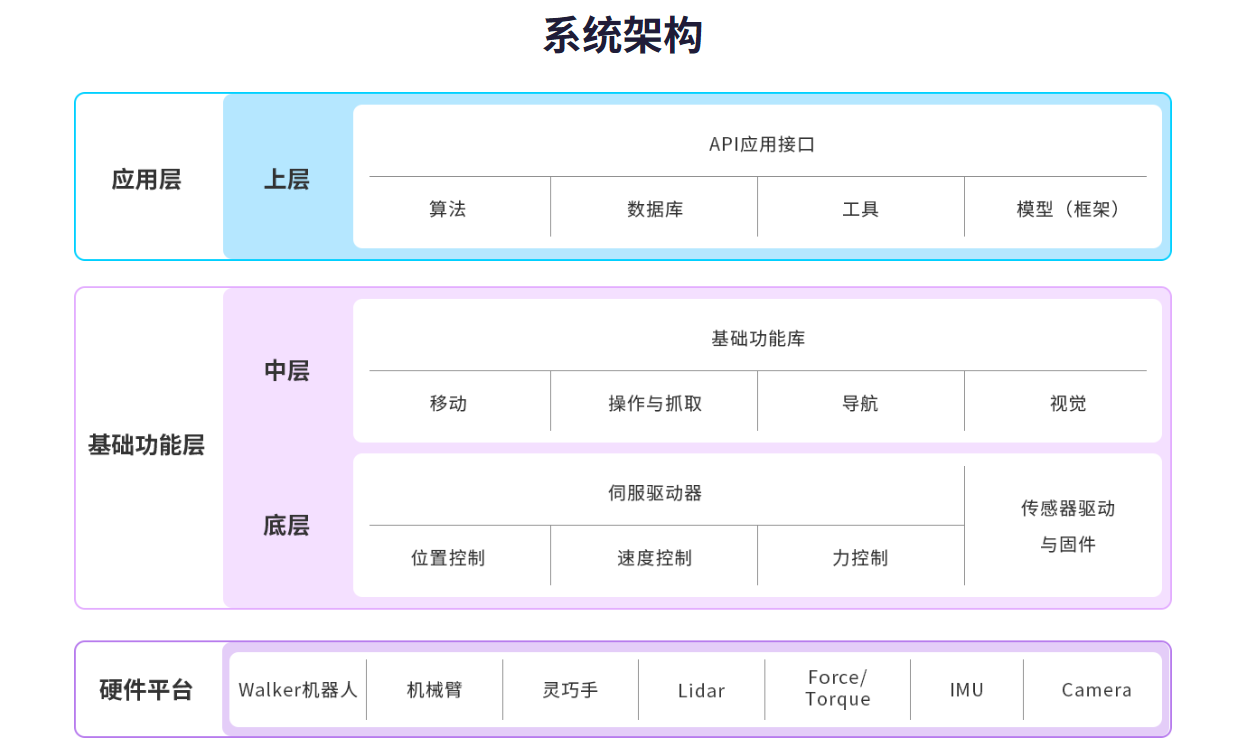
仿真平台本质上是一个高度还原现实世界的 “虚拟物理环境”。在这个环境中,机器人拥有完整的数字化身体结构,包含关节、连杆、传感器与动力系统,并严格遵循物理规律运行。
仿真平台能够模拟机器人在真实世界中可能遇到的各种情况:行走是否稳定、抓取是否碰撞、关节是否过载、动作是否连续。每一次电机输出、每一次身体接触地面,都会经过物理引擎计算反馈结果,从而判断这个动作在现实中是否可行。
在真实机器人尚未量产、硬件成本极高的背景下,仿真平台成为算法训练和系统验证的核心工具。大量行走控制、强化学习策略、灵巧操作动作,都是先在仿真环境中反复训练数百万次,再逐步迁移到真实机器人之上。
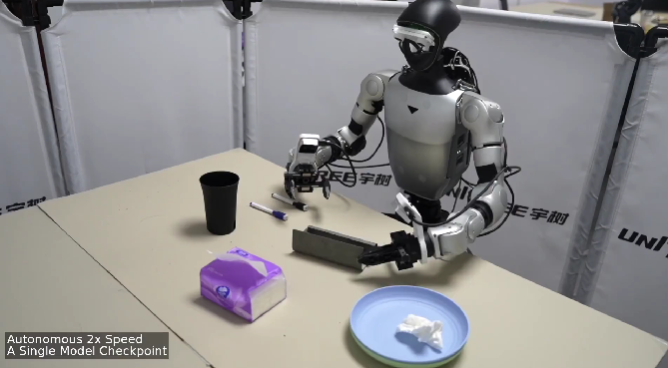

搭载 UnifoLM-VLA-0 模型的机器人在12个复杂操作任务上的真机运行
开源仓库地址:github.com/AgibotTech/genie_sim
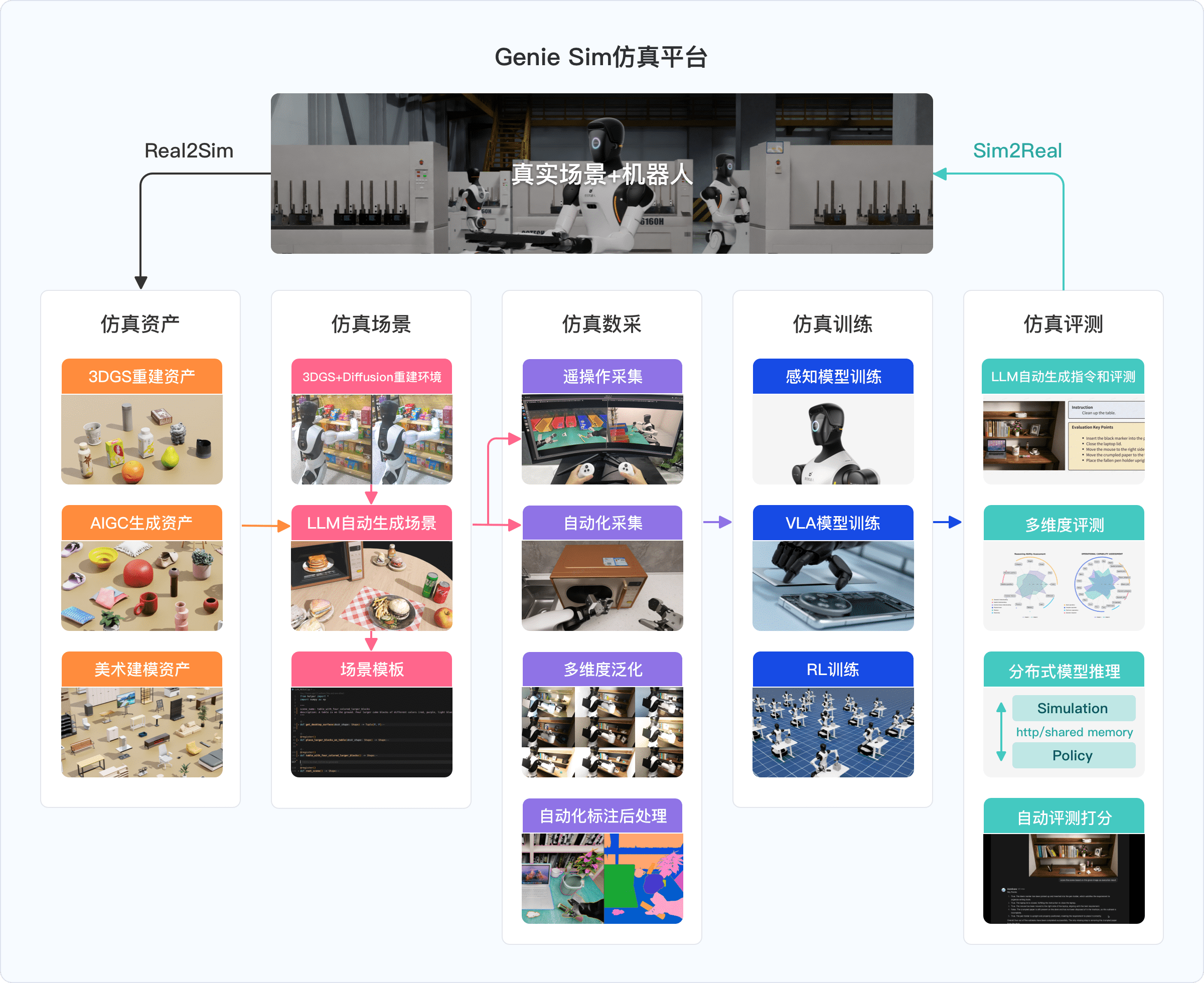
Genie Sim 3.0 仿真平台架构
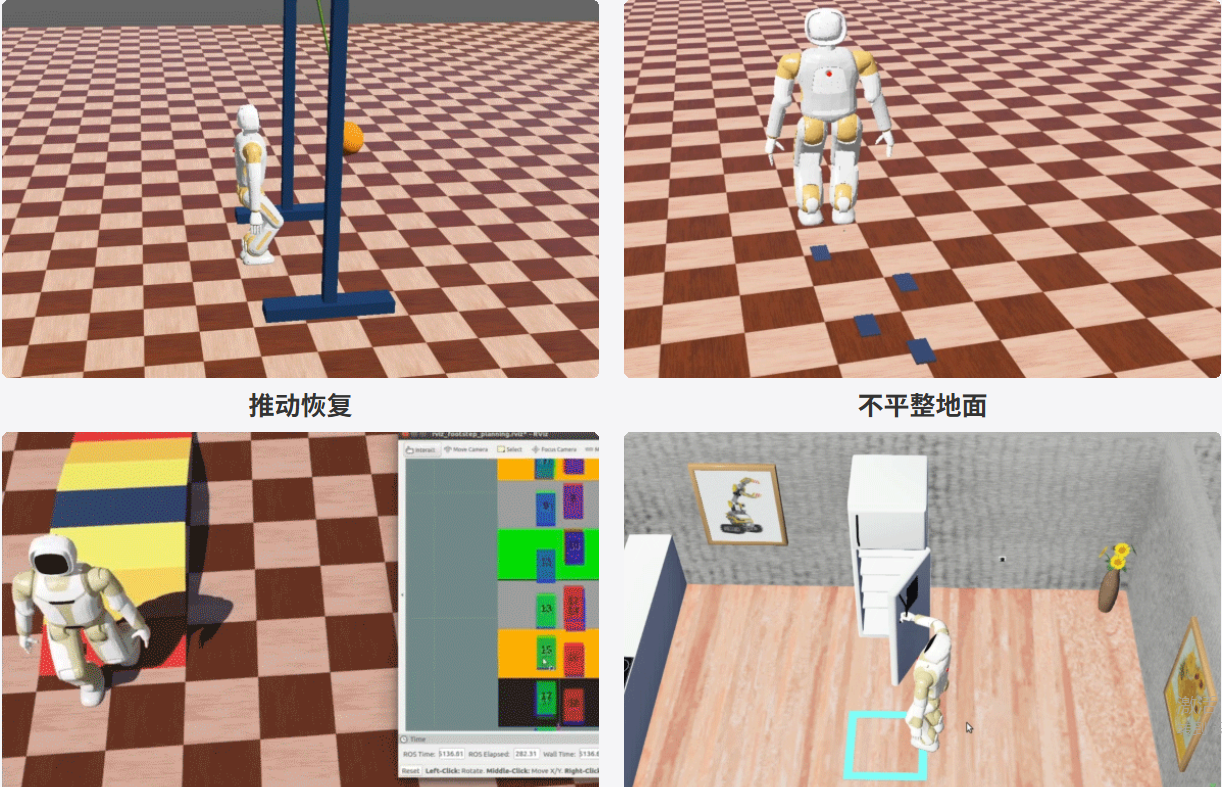
搭载 Walker 虚拟仿真平台的机器人运行效果
搭载 Matrix开源联合仿真平台的机器狗运行效果
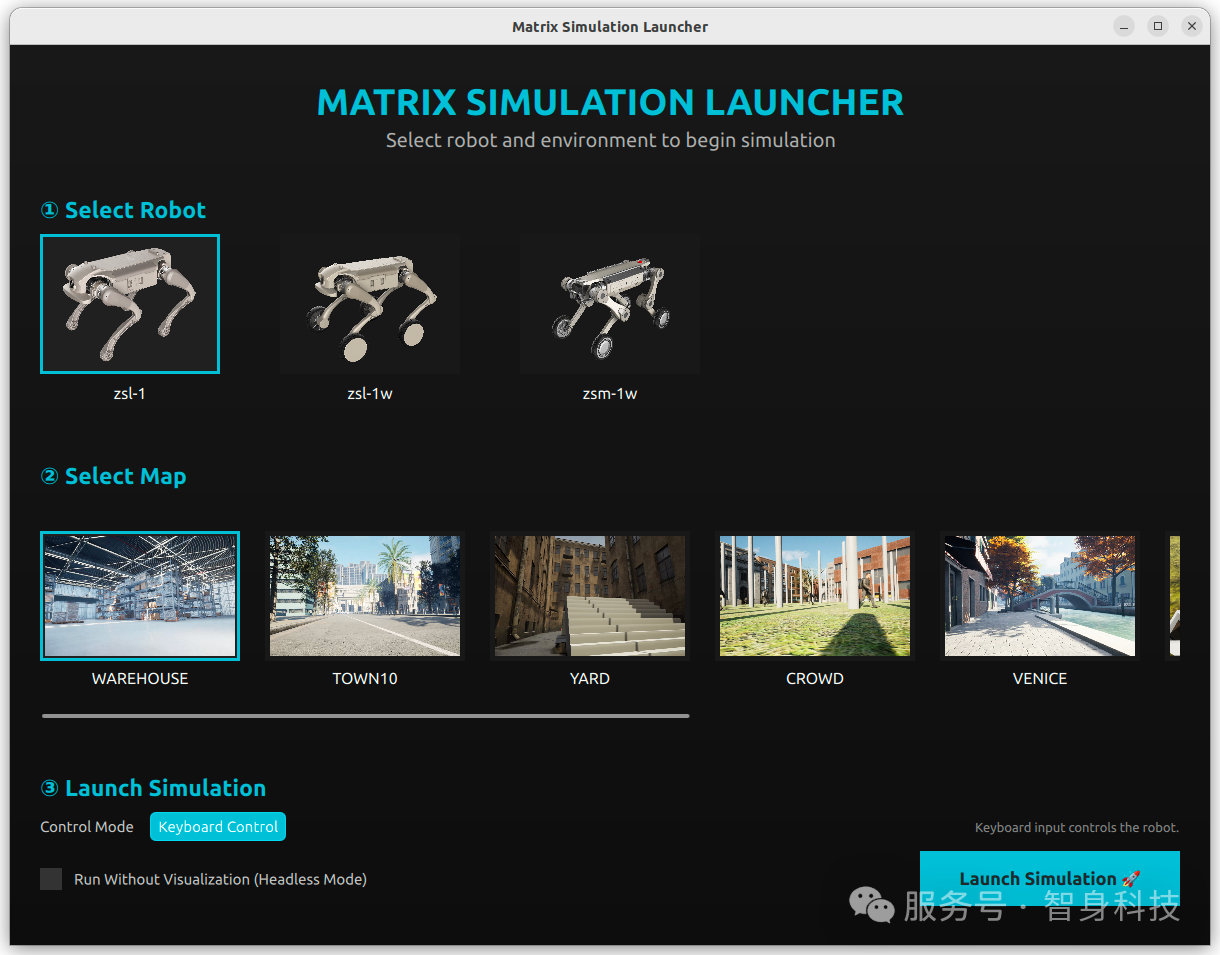
Matrix开源联合仿真平台操作流程
整理自:知乎、网络文章及各公司官网
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。
为了更好地促进行业人士交流,艾邦搭建了机器人产业微信群,欢迎执行器、灵巧手、结构件、摄像头、IMU、传感器、电芯、动力系统、伺服系统、热管理系统、软件算法等零部件、整机组装、设计、设备、原材料企业,以及机器人品牌、终端应用等企业加入,进群交流。

活动推荐1:

活动推荐2:
一、拟邀议题
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
医疗康复与养老护理场景的机器人解决方案 |
|
|
|
|
|
|
|
|
|
|
|
电机驱动器与控制模块的供应链整合 |
|
|
高性能执行器用磁性材料与精密机械加工件供应链 |
|
|
高性能 UHMW‑PE 纤维材料在腱驱动系统中的产业化进展 |
|
|
电子皮肤与力觉传感器供应链创新案例 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
议题征集中,创新演讲及赞助请联系Elaine 张 13418617872(同微信)
二、拟邀企业类型:
三、报名方式
报名方式一:
邮箱:ab008@aibang.com


报名方式二:
长按二维码扫码在线登记报名

或者复制网址到浏览器后,微信注册报名
https://www.aibang360.com/m/100296?ref=172672
点击阅读原文,即可报名
2025年,人形机器人产业迎来爆发拐点。特斯拉Optimus量产在即,华为、宇树等企业加速技术突破,行业正从“实验室研发”向“规模化落地”跃迁为打通产业链上下游协作壁垒,艾邦机器人正式组建"人形机器人全产业链交流群",覆盖金属材料、复合材料、传感器、电机、减速器等全硬件环节,助力企业精准对接资源、共享前沿技术!
扫码关注公众号,底部菜单申请进群
